Video Friday is your weekly selection of awesome robotics videos, collected by your Automaton bloggers. We’ll also be posting a weekly calendar of upcoming robotics events for the next two months; here’s what we have so far (send us your events!):
RobotCraft 2017 – July 3-3, 2017 – Coimbra, Portugal
ICAR 2017 – July 10-12, 2017 – Hong Kong
RSS 2017 – July 12-16, 2017 – Cambridge, Mass., USA
MARSS – July 17-21, 2017 – Montreal, Canada
Summer School on Soft Manipulation – July 17-21, 2017 – Lake Chiemsee, Germany
Living Machines Conference – July 25-28, 2017 – Stanford, Calif., USA
RoboCup 2017 – July 27-31, 2017 – Nagoya, Japan
IEEE CASE 2017 – August 20-23, 2017 – Xi’an, China
IEEE ICARM 2017 – August 27-31, 2017 – Hefei, China
Let us know if you have suggestions for next week, and enjoy today’s videos.
I don’t speak Dutch so I have no idea what words like "hoppen" or "crashen" mean, and you’ll just have to take wild guesses about what’s going on in this video. Or autotranslate the captions, that works too.
Google Translate says that "the ultimate challenge is to design a robot that can move as quickly as possible through a repetitive jig." I like the way that sounds, so I’m sticking with it.
[ TU Delft ]
Does It need to be Moved? If so, be like all of these cool robots, and use MoveIt!
[ MoveIt! ]
All I know about this video is that it’s from Flyability’s director of engineering Ludovic Daler, the title is "Gimball Game 1," and it looks like lots of fun:
[ Flyability ]
It’s always nice to see Valkyrie picking things up and not falling over, but my favorite thing in this video is whatever is going on at 0:30 because it’s trippy.
Yiming Yang, Wolfgang Merkt, Henrique Ferrolho, Vladimir Ivan, and Sethu Vijayakumar. "Efficient Humanoid Motion Planning on Uneven Terrain Using Paired Forward-Inverse Dynamic Reachability Maps". IEEE Robotics and Automation Letters, 2017, In Press.
NAO, in case you hadn’t noticed, actually has enormous biceps. I guess this is why.
And if working out isn’t your style, there’s always bowling:
[ RobotLab ]
HIROTEC AMERICA has partnered with OTTO Motors to automate HIROTEC Group’s spare parts production as part of an overall strategic goal to achieve lights-out manufacturing for 24/7 operation. The OTTO 1500 self-driving vehicle is used for automated material movement, while a Yaskawa Motoman dual-arm manipulator has been integrated onto the OTTO to pick up and dip parts in black oxide for corrosion protection.
Is it just my imagination or is that an itty bitty little version of the robot right at the start of the video? Because if so, I want one. I need one. Desperately.
[ Otto Motors ]
Engineering researchers funded by the National Science Foundation (NSF) have developed a technique that could help improve mobility for millions of people who use prosthetic limbs and exoskeletons to walk.
The team, led by Steve Collins of Carnegie Mellon University, has developed a technique that uses an algorithm that optimizes a prosthesis as a person walks, improving energy economy. The system examines different patterns of assistance to find just the right pattern for each individual. The system continuously monitors and adjusts to increases or decreases in effort by the user. Potential applications for this technique include improved prostheses, rehabilitation, and assistance for the elderly.
[ NSF ]
If you thought we hadn’t reached peak delivery drone yet, Oscar Mayer has one that will unleash tube meats onto your head:
What would impress me more is if the drone were to drop a hot dog, dive under it, and slice it up. Because that’s how hot dogs are supposed to be served.
[ Oscar Mayer ] via [ Gizmodo ]
Executing agile quadrotor maneuvers with cable-suspended payloads is a challenging problem and complications induced by the dynamics typically require trajectory optimization. State-of-the-art approaches often need significant computation time and complex parameter tuning. We present a novel dynamical model and a fast trajectory optimization algorithm for quadrotors with a cable-suspended payload. Our first contribution is a new formulation of the suspended payload behavior, modeled as a link attached to the quadrotor with a combination of two revolute joints and a prismatic joint, all being passive. Differently from state of the art, we do not require the use of hybrid modes depending on the cable tension. Our second contribution is a fast trajectory optimization technique for the aforementioned system.
We experimentally validate our approach on a real quadrotor showing that our method generalizes to a variety of tasks, such as flying through desired waypoints while avoiding obstacles, or throwing the payload toward a desired target. To the best of our knowledge, this is the first time that three-dimensional, agile maneuvers exploiting the system dynamics have been achieved on quadrotors with a cable-suspended payload.
From OSRF (or whatever they’re calling themselves these days):
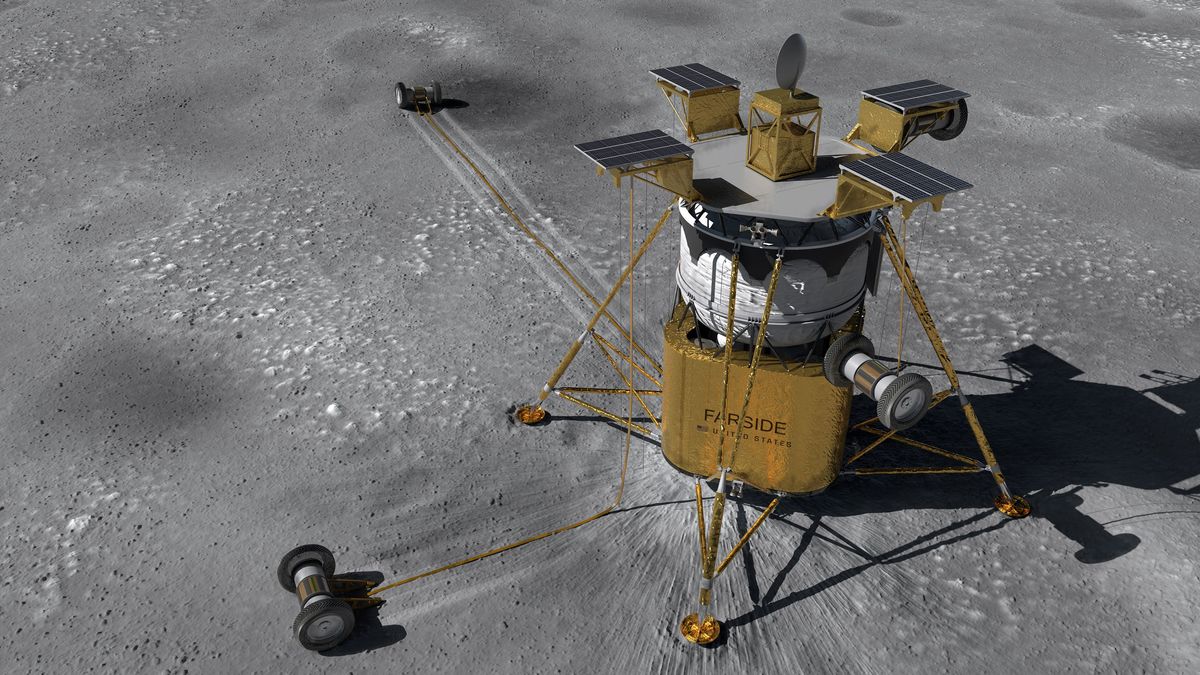
We’ve been working for the past several months with the NASA Ames Intelligent Robotics Group. We’re helping them to model and simulate their forthcoming Resource Prospector (RP) rover, which will be sent to a pole of the moon to drill for water (as ice) and other volatiles. In advance of the mission, they’re using Gazebo to simulate RP to, among other things, support driving experiments with human operators. For these experiments, the visual realism of the camera images that we produce in Gazebo is paramount. So we’re very excited to share this recent result, which shows the view from a simulated camera mounted on the RP model being teleoperated over lunar terrain:
Oh, and they added some lens flares, in case you hadn’t figured that out.
[ O(S?)R(F?) ]
During the latest NASA-led demonstrations of technologies that could be part of an automated traffic management system for drones, pilots sent their vehicles beyond visual line-of-sight in simulated infrastructure inspections, search and rescue support, and package delivery.
[ NASA UTM ]
This video from Kuka is kinda dry, but the idea is cool: using robots (and lasers!) to make stuff from scratch out of metal wire:
KUKA partner Midwest Engineered Systems has pioneered additive manufacturing with metal using six-axis robots from KUKA. The result is a more flexible system that cuts both cost and process time drastically when compared to traditional subtractive manufacturing methods, while at the same time allowing for material innovation by combining different types of metals in one part.
[ Kuka ]
JR2 is an autonomous mobile manipulator, specially designed for the development of industrial mobile manipulation applications. The mobile manipulator allows users to interact with their environment in total safety. JR2 has been developed by Robotnik, Gaitech and Smokie Robotics.
[ Robotnik ]
Being an intern at Fetch Robotics means unlimited free snacks, occasionally badminton, more snacks, and sometimes doing robot stuff. Here is some of that robot stuff:
Aravind Vadali - Compact Wrist Controller
Luc Bettaieb – Improved Robot Localization
Hanjun Song – Manipulation and Arm Teleop
Did you miss the 2017 RoboBoat finals? Nooo problem! All 3 hours, 21 minutes, and 44 seconds were livestreamed and archived on YouTube, so go nuts.
For those of you not keeping score, here are the scores:
1st Place – Daytona Beach Homeschoolers
2nd Place – Hagerty High School
3rd Place – Georgia Tech
4th Place – Institut Teknologi Sepuluh Nopember
5th Place – Embry-Riddle Aeronautical University
And the University of Michigan took home a special prize for best video:
[ RoboBoat ]
Evan Ackerman is a senior editor at IEEE Spectrum. Since 2007, he has written over 6,000 articles on robotics and technology. He has a degree in Martian geology and is excellent at playing bagpipes.
Erico Guizzo is the Director of Digital Innovation at IEEE Spectrum, and cofounder of the IEEE Robots Guide, an award-winning interactive site about robotics. He oversees the operation, integration, and new feature development for all digital properties and platforms, including the Spectrum website, newsletters, CMS, editorial workflow systems, and analytics and AI tools. An IEEE Member, he is an electrical engineer by training and has a master’s degree in science writing from MIT.