The Conversation (0)

Middle-size robots compete in Eindhoven, Netherlands in 2013.
Joyce Van Belkom/AFP/Getty Images
LightGreen
From 2019 to 2022, I had the privilege of serving as president of the RoboCup Federation. RoboCup is an annual international competitive event that merges visionary thinking about how AI and robotics will change the world with practical robot design. Participants spend months solving diverse technical problems to enable their robots to autonomously play soccer, do household chores, or search for disaster victims. And their efforts are in turn enabling fundamental advances in a range of fields, including machine learning, multiagent systems, and human-robot interaction.
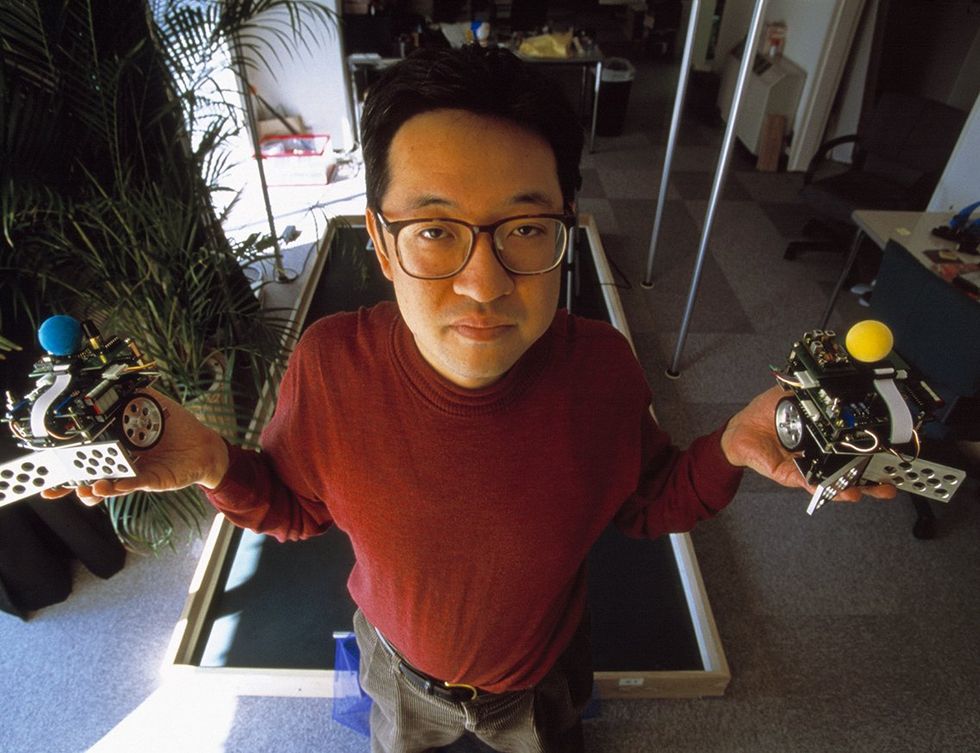 Dr Hiroaki Kitano, Japanese artificial intelligence researcher, holding two members of his miniature robot football team.Peter Menzel/Science Source
Dr Hiroaki Kitano, Japanese artificial intelligence researcher, holding two members of his miniature robot football team.Peter Menzel/Science Source
RoboCup’s original goal, as defined by founding president Hiroaki Kitano, was to enable a team of fully autonomous humanoid robots to beat the best human soccer team in the world on a real, outdoor field by the year 2050. Since the first RoboCup competition in 1997 which featured three leagues—small-size wheeled robots, middle-size wheeled robots, and simulation—the event has expanded to include humanoid robot soccer leagues, as well as other leagues devoted to robots with more immediate practicality. The next RoboCup event takes place in July in Bordeaux, France, where 2,500 humans (and 2,000 robots) from 45 countries are expected to compete.
The Beginning
A history of RoboCup from 1997-2011, by Peter Stone and Manuela Veloso.www.youtube.com
The first RoboCup, which I attended as a student, was held in 1997 in a small exhibit room at the International Joint Conference on AI (IJCAI) in Nagoya, Japan. The level of competition was, by today’s standards, not very high. However, it’s important to remember that many “roboticists” back then didn’t work with real robots. RoboCup was unusual during its early years in that it forced people to build complete, integrated working systems that could sense, decide, and act.
Small-Size League

Small-size robots compete at RoboCup 2017 in Nagoya, Japan.
Kazuhiro Nogi/AFP/Getty Images
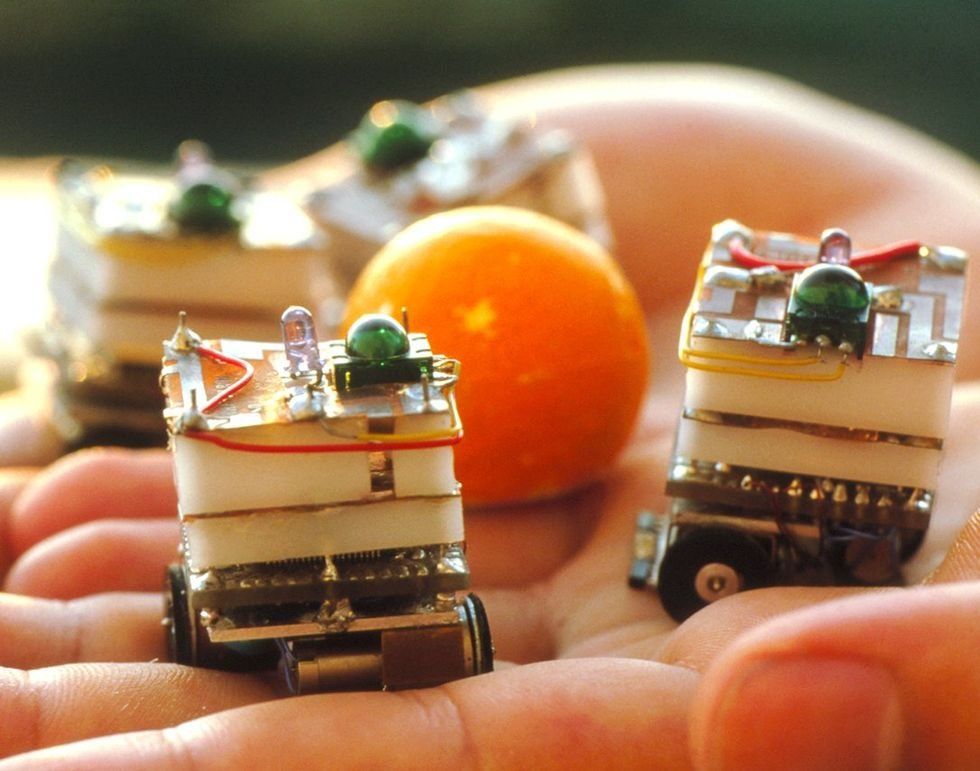
There have been many technical advances since the first teams of small-size robots (shown here with a golf ball) competed in RoboCup in 1997.
Philippe Plailly/Science Source
Over the years, RoboCup has seen huge improvements in the level of play, often following a pattern of one team making a discovery and dominating the competition for a year or two and then being supplanted by another. For example, in the Small-Size League, in which the robots use a golf ball and external perception and computing, Team FU-Fighters from Freie Universität Berlin and the Cornell RoboCup team introduced some innovations in 1999. They both introduced devices to mechanically “kick” the ball, rather than simply driving into it. The following year, Cornell began controlling the ball using a device that spins it backward toward the robot to “dribble.” As the first teams to come up with these strategies, they had a big advantage, but other teams soon followed suit.
The Small-Size League final between TIGERs Mannheim and ER-Force at RoboCup 2022 in Bangkok, Thailand.
Standard Platform League
Austin Villa, UT Austin’s RoboCup team, describing the RoboCup Standard Platform League in 2008.
While many RoboCup leagues include a hardware design component, some teams prefer to focus more on software. In the Standard Platform League, each team is provided with identical robots, and thus the best combination of algorithms and software engineering wins. The first standard platform for RoboCup was the Aibo, a small robot dog made by Sony. Ultimately, though, the goal of RoboCup is to achieve human-level performance on a bipedal robot, and so the Standard Platform League now uses a small humanoid robot called Nao, made by SoftBank. Rugged and capable, Nao is able to fall over and quickly get up again, a critical skill for soccer-playing humans and robots alike.
The Standard Platform League final between HTWK Robots and B-Human at RoboCup 2022 in Bangkok, Thailand.
Middle-Size League
The Middle-Size League final between Tech United and the Falcons at RoboCup 2022 in Bangkok, Thailand.
The Middle-Size League uses a full-size soccer ball and onboard perception on waist-high wheeled robots. Over the years, it has showcased an enormous amount of progress toward human-speed, human-scale soccer. In recent competitions, the robots have moved briskly around a large field, autonomously developing offensive and defensive strategies and coordinating passes and shots on goal. The typical middle-size robot has the skill of a competent primary-school human, although in this league the robots don’t have to worry about legs. And in some ways, the middle-size robots have advantages over human players—the robots have omnidirectional sensing, wireless communication, and the ability to consistently place very accurate shots thanks to a mechanical ball-launching system.
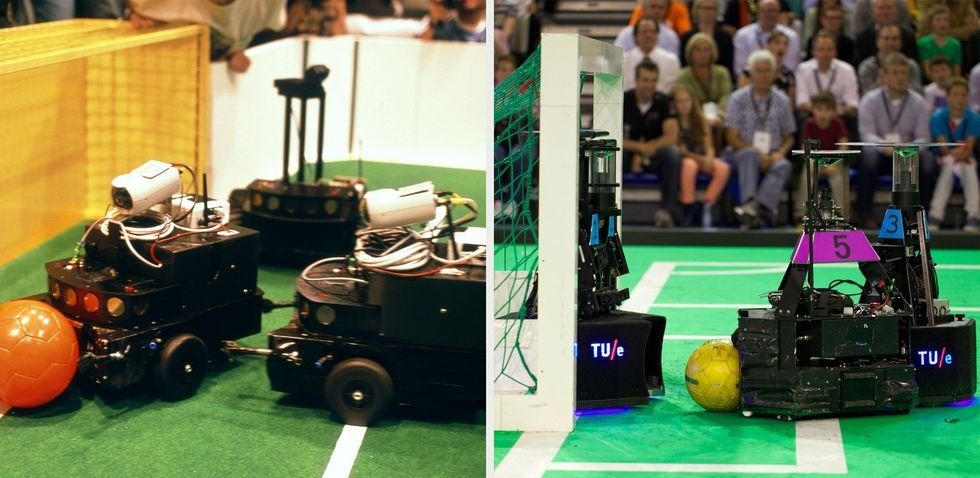
Significant advancements have been made in Middle-Size League robots over the years, as shown by these differences in the hardware between 1998 and 2013.
Left: Volker Steger/Science Source; Right: Sylvia Lederer/Xinhua/Redux
Humanoid League

Small legged robots compete in the Kidsize Humanoid League at RoboCup 2017 in Nagoya, Japan.
Kazuhiro Nogi/AFP/Getty Images
The RoboCup Humanoid League, launched in 2002, is critical to meeting our objective of fielding a team of highly skilled humanoid robots by 2050. Bipedal robots are an ongoing challenge, especially when those robots have to interact with full-size soccer balls, balancing on one leg to kick with the other. The humanoids must have humanlike proportions and sensor configurations akin to human perception—which means, among other things, no omnidirectional sensing.
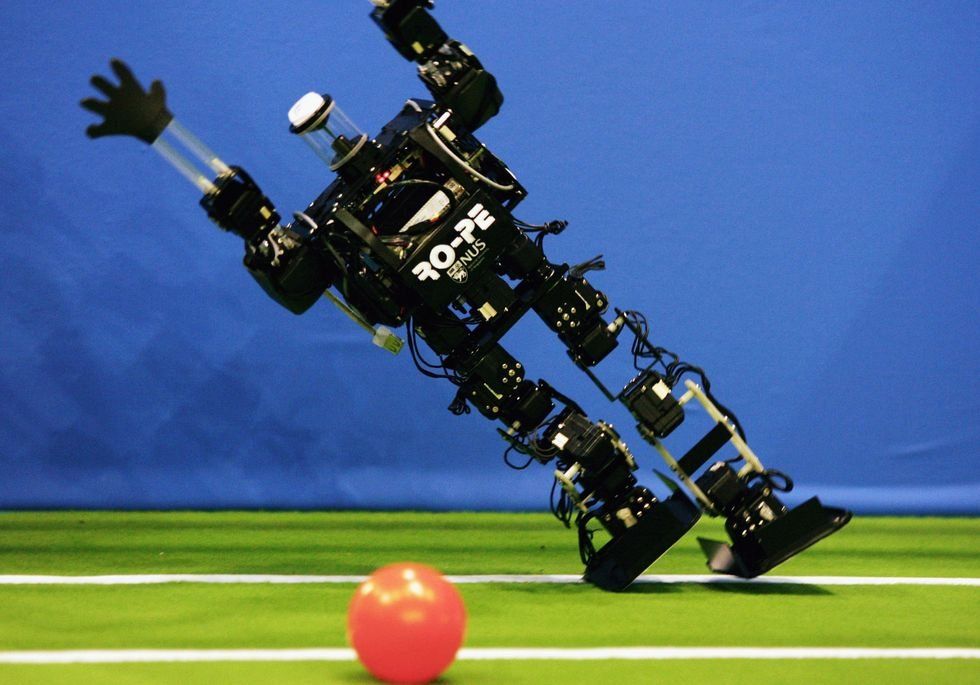
A humanoid robot of the children size league attempts a save during the Robocup 2006 football world championships at the Congress Centre on June 14, 2006 in Bremen.
Malte Christians/Bongarts/Getty Images
RoboCup 2022 Humanoid AdultSize Soccer Final: NimbRo (Germany) vs. HERoEHS (Korea)
The Adult-Size Humanoid League final between NimbRo and the HERoEHS at RoboCup 2022 in Bangkok, Thailand.
Simulation

The RoboCup Simulation League uses virtual versions of the Standard Platform League humanoid robots.
RoboCup Federation
Even in the Standard Platform League, hardware can be frustrating, so the RoboCup Simulation League allows teams to work entirely in software. This enables more rapid progress using cutting-edge techniques. My own team, UT Austin Villa, started using hierarchical machine learning to develop skills such as walking and kicking in the Simulation League in 2014, which allowed us to dominate the competition. But in 2022, FC Portugal and Magma Offenburg were able to surpass us with deep reinforcement learning methods.
Other Leagues

A mobile manipulation robot autonomously interacts with a toaster oven at RoboCup@Home 2016 in Leipzig.
Robocup Federation
While soccer is the ultimate goal of Robocup, and it motivates research on fundamental topics such as robot vision and mobility, it can be hard to see the practicality in a game. Other RoboCup leagues thus focus on more immediate applications. RoboCup@Home features robots for domestic environments, RoboCup Rescue is for search-and-rescue robots for disaster response, and RoboCup@Work develops robots for industry and logistics tasks.
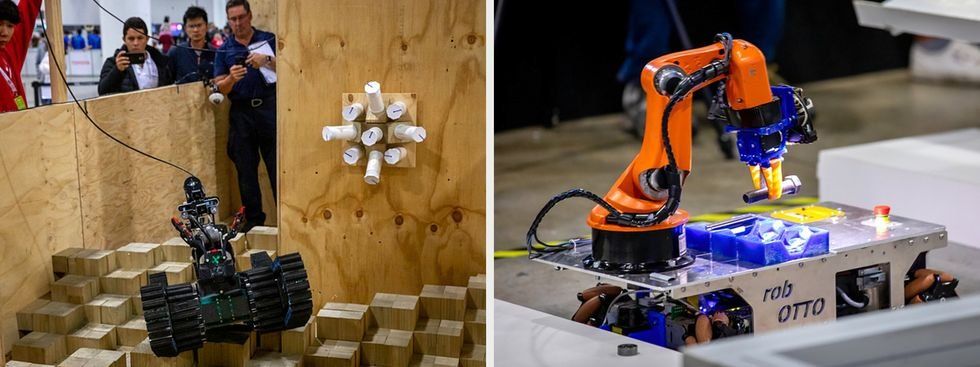
A disaster response robot traverses a challenging mobility course as part of RoboCup Rescue [left] while an industrial mobile manipulator places a part during RoboCup@Work [right] at RoboCup 2019 in Sydney.
Robocup Federation (2)
Robots vs. Humans
European RoboCup 2022 Middle-Size winning team Tech United plays an exhibition game against professional women’s team Vitória SC in Guimarães, Portugal. The women intentionally tied against the robots to end the game in penalties.
At the conclusion of a RoboCup event, there has been a tradition since 2011 of the trustees of the RoboCup Federation playing a friendly game against the winning team of the Middle-Size League. In recent years, the middle-size robots have become surprisingly competitive, able to keep possession of the ball, dribble around the opposing team, and string together passes across the field. The robots may not be ready to take on the world champions quite yet, but the progress has been impressive—in 2022, Tech United Eindhoven played a friendly match against a Portuguese professional women’s team, Vitória SC, and the robots managed to score several goals (after the women took it easy on them).
RoboCup’s Legacy

The author with members of the Austin Villa RoboCup team.
Peter Stone
Compared to 25 years ago, there are now many more robotics competitions to choose from, and applications of AI and robotics are much more widespread. RoboCup inspired many of the other competitions, and it remains the largest such event. Our community is determined to keep pushing the state of the art. The event draws teams from research labs specializing in mechanical engineering, medical robotics, human-robot interaction, learning from demonstration, and many other fields, and there’s no better way to train new students than to encourage them to immerse themselves in RoboCup.
The importance of RoboCup can also be measured beyond the competition itself. One of the most notable successes, stemming from the early years of the competition, was the technology spun off from the small-size league to form the basis of Kiva Systems. Kiva’s robot was influenced by that of Cornell’s RoboCup team, led by Raffaello D’Andrea. After helming his team to Small-Size League victories in 1999, 2000, 2002, and 2003 , D’Andrea went on to cofound Kiva Systems. The company, which developed warehouse robots that moved shelves of goods, was acquired by Amazon in 2012 for US $775 million to become the core of Amazon’s warehouse robotics program.
Future of RoboCup
At this point, you may be wondering what the prospects are for achieving RoboCup’s founding goal—enabling a team of autonomous humanoid robots to beat the world’s best human team at a game of soccer on a real, outdoor field by the year 2050. Will soccer go the way of chess, checkers, poker, Gran Turismo, “Jeopardy!”, and other human endeavors and be conquered by AI? Or will the requirements for real-world perception and humanlike speed and agility keep soccer out of reach for robots? This question remains a source of uncertainty and debate within the RoboCup community. Although 27 years is a very long time in technological terms, physical automation tends to be significantly harder and take much longer than purely software-oriented tasks do.
Ultimately, if the community is going to achieve its goals, we will need to address two challenges: building hardware that can move as quickly and easily as people do, and creating software that can outsmart the best human players in real time. Some experts point to existing state-of-the-art humanoid robots as evidence that sufficiently capable hardware is already available. As impressive as they are, however, I don’t think these robots can match the capabilities of the most skilled human athletes just yet. I haven’t seen any evidence that even the best humanoid robots today can dribble a soccer ball and deftly change directions at high speed in the way that a professional soccer player can—especially when factoring in the requirement that for professional players to agree to get on the field with robots, the robots will need to be not too heavy or powerful: They will need to be both skilled and eminently safe.
Regardless of how it turns out, there is no question in my mind that RoboCup is an enduring grand challenge for AI and robotics, as well as a great training ground for the next generation of roboticists. The RoboCup community is thriving, generating new ideas and new engineers and scientists. I’ve been proud to have led the RoboCup organization, and look forward to seeing where it will go from here.
{"imageShortcodeIds":[]}


