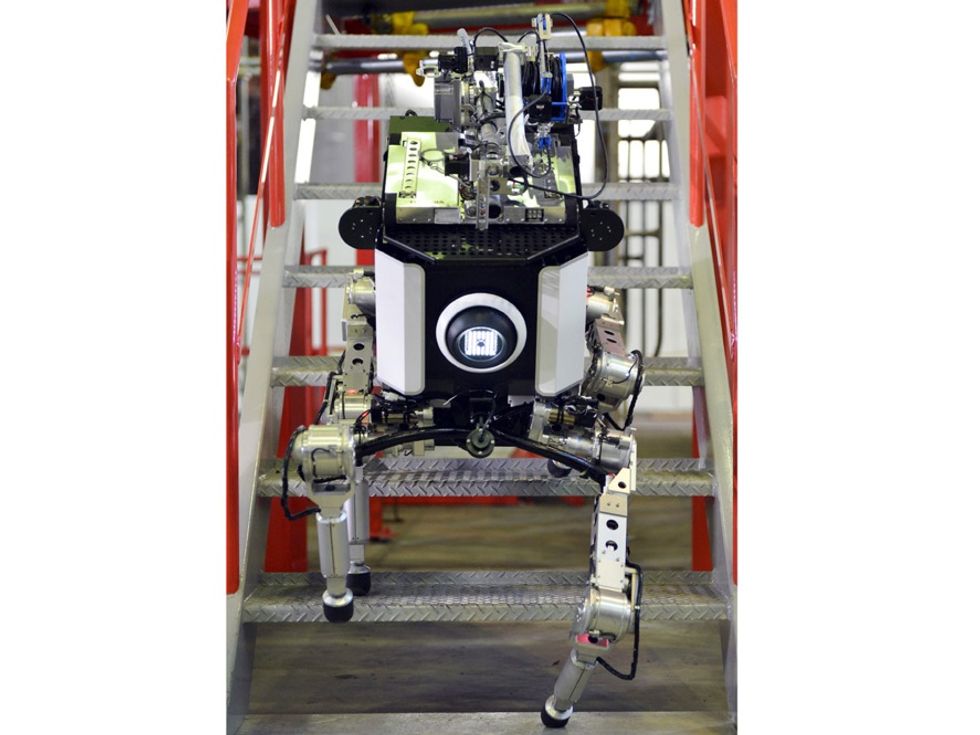
Photo: The Yomiuri Shimbun/AP Photo
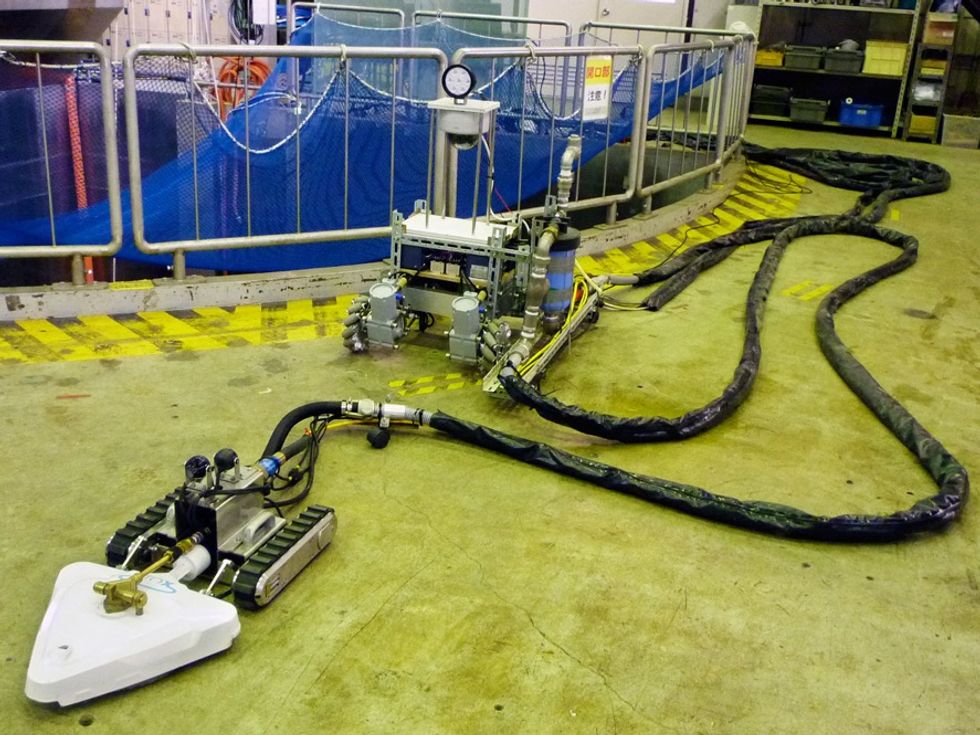
Homegrown: Despite Japan’s thriving robotics industry, there were few domestically produced robots capable of working in a rubble-strewn disaster site. This Quince, built by researchers at the Chiba Institute of Technology, near Tokyo, was one of the few that was ready to go.









The Conversation (0)