How Stanford Built a Humanoid Submarine Robot to Explore a 17th-Century Shipwreck
Exclusive photos take you through the first mission of Stanford’s diving robot
Back in April, Stanford University professor Oussama Khatib led a team of researchers on an underwater archaeological expedition, 30 kilometers off the southern coast of France, to La Lune, King Louis XIV’s sunken 17th-century flagship. Rather than dive to the site of the wreck 100 meters below the surface, which is a very bad idea for almost everyone, Khatib’s team brought along a custom-made humanoid submarine robot called Ocean One.
In this month’s issue of IEEE Robotics and Automation Magazine, the Stanford researchers describe in detail how they designed and built the robot, a hybrid between a humanoid and an underwater remotely operated vehicle (ROV), and also how they managed to send it down to the resting place of La Lune, where it used its three-fingered hands to retrieve a vase.
Most ocean-ready ROVs are boxy little submarines that might have an arm on them if you’re lucky, but they’re not really designed for the kind of fine manipulation that underwater archaeology demands. You could send down a human diver instead, but once you get past about 40 meters, things start to get both complicated and dangerous. Ocean One’s humanoid design means that it’s easy and intuitive for a human to remotely perform delicate archeological tasks through a telepresence interface.
It’s an impressive and unique project (the full article is on IEEE Xplore) that demonstrates the possibilities of human-robot collaboration, and we agree with RAM editor-in-chief Bram Vanderborght when he says he’s “convinced that the complementary strengths of both humans and robots combined is the winning solution instead of simple human replacement.” We also agree with Bram that “the photos alone are brilliant,” so we teamed up with RAM to showcase some of them for you in the slideshow below. This is the beginning of a closer Spectrum-RAM collaboration so expect more slideshows, sneak peeks, and Q&As with authors next year. Enjoy!
The researchers deploy their diving humanoid robot Ocean One in preparation for its mission to Louis XIV’s flagship.
▲
The researchers envision building a team of oceanic robots controlled by human operators. The robots would send and receive data through a relay station that’d provide power recharge.
▲
A human operator guiding the robot in an underwater bimanual task through a haptic-visual interface.
▲
Ocean One’s body has eight thrusters, four on each side. The floatation foams create a neutrally buoyant platform.
▲
During docking, the hands come to a complete halt while the arms continue to bend to dissipate the body’s inertial forces.
▲
The design of the arms was optimized to maximize the range of motion over which the faster dynamics of the arms can be used to accommodate the slower dynamics of the body.
▲
The three-fingered compliant tendon-driven hands can pinch with straight fingers and perform interlaced wrap grasps.
▲
A close-up of the hand. A back-drivable transmission allows the operator to choose between low and high stiffness. Interaction forces are measured by a six-axis load cell at the wrist.
▲
The graphical user control interface allows the user to monitor the system state, select control modalities, and plan manipulation tasks.
▲
The control room on-board the research ship for this mission included the haptic-visual interface for Ocean One.
▲
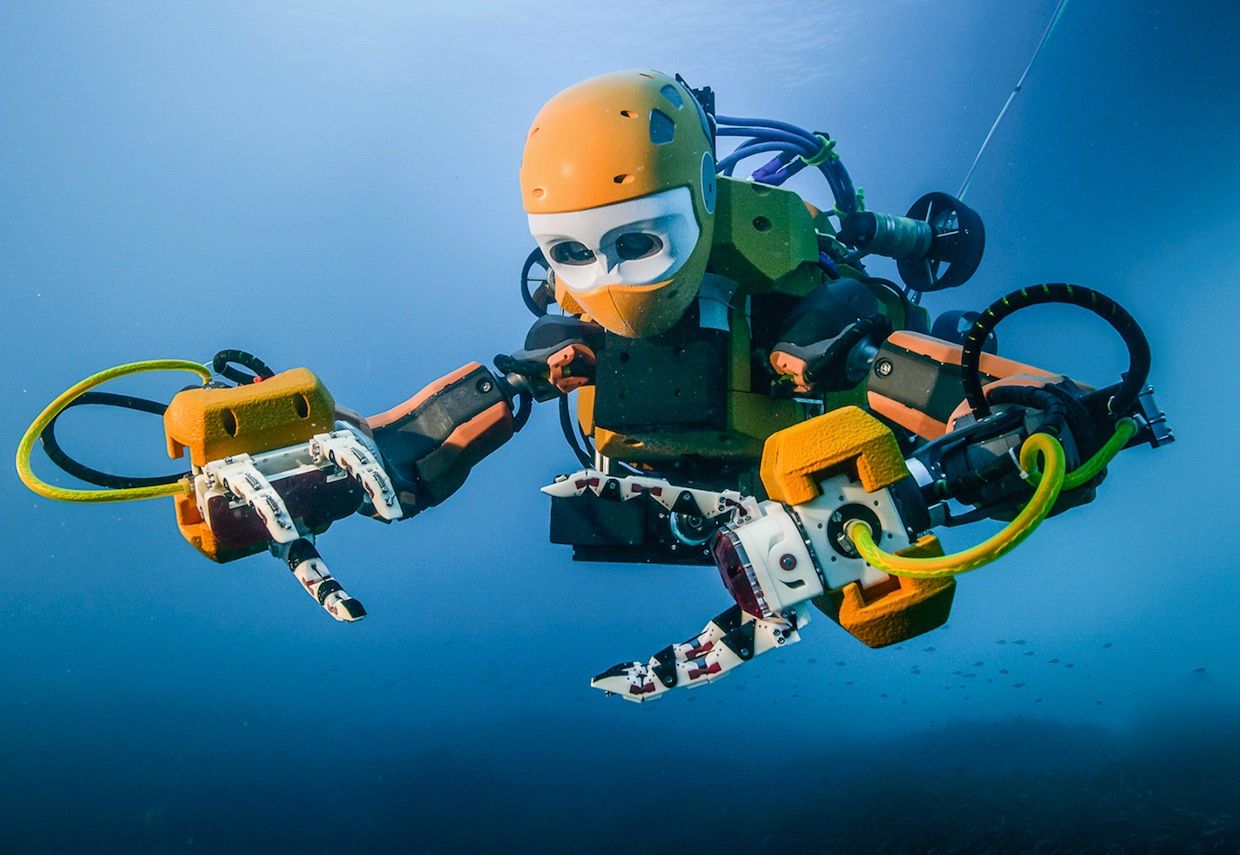
Ocean One, diving in the Mediterranean Sea at 15 meters, manipulating a rope.
▲
Ocean One, diving in the Mediterranean Sea at 15 meters, interacting with the diver in a compliant and safe manner.
▲
Ocean One grasping a vase at the Lune site. The artifact was placed in a sample box and retrieved at the surface. The recovered Catalan vase, seen with its acquired biofilm.
▲
“Ocean One: A Robotic Avatar for Oceanic Discovery” appears in the December 2016 issue of IEEE Robotics and Automation Magazine.
Evan Ackerman is a senior editor at IEEE Spectrum. Since 2007, he has written over 6,000 articles on robotics and technology. He has a degree in Martian geology and is excellent at playing bagpipes.
Erico Guizzo is the director of digital innovation at IEEE Spectrum, and cofounder of the IEEE Robots Guide, an award-winning interactive site about robotics. He oversees the operation, integration, and new feature development for all digital properties and platforms, including the Spectrum website, newsletters, CMS, editorial workflow systems, and analytics and AI tools. An IEEE Member, he is an electrical engineer by training and has a master’s degree in science writing from MIT.