
 Keep On Turning: The authors’ motor represents an advance on another design—one that did not use magnets to shift the field.Photos: Karlsruhe Institute of Technology
Keep On Turning: The authors’ motor represents an advance on another design—one that did not use magnets to shift the field.Photos: Karlsruhe Institute of Technology

During the first decade of the 1900s, 38 percent of all cars in the United States ran on electricity, a share that declined to practically zero as the internal combustion engine rose to dominance in the 1920s. Today’s drive to save energy and reduce pollution has given the electric car new life, but its high cost and limited range of travel combine to keep sales figures low.
Most attempts to solve these problems involve improving the batteries. Of course, better electric storage systems—whether batteries or fuel cells—must continue to be part of any strategy for improving electric vehicles, but there’s plenty of room for improvement as well in another fundamental vehicle component: the motor. For the past four years we have been working on a new concept for an electric traction motor, the kind used in electric cars and trucks. Our latest design improves efficiency quite a bit in comparison with that of conventional designs—enough to make electric vehicles more practical and affordable.
Last year we proved our prototype motor in extensive tests on the laboratory bench, and though it will be a while before we can put the machine in a car, we have every reason to expect that it will perform just as well in that setting. Our motor could therefore extend the range of today’s EVs even if there is no further progress in battery technology.
To understand the challenge, a quick review of the basics of electric motor design is in order. Compared with internal combustion engines, electric motors are simple, with just a handful of critical components. For mechanical reasons, a housing is required; it’s called a stator because it stays put. A rotor is needed to spin a shaft and create torque. To make the motor work, the stator and the rotor need to interact magnetically so as to convert electrical energy to mechanical energy.
This magnetic interface is where the electric motor concepts differ. In brushed direct-current motors, direct current flows through brushes that slide over a commutator. The current goes through the commutator to energize windings in the rotor. These windings are repelled by permanent magnets or electromagnets in the stator. As the brushes slide over the commutator, it periodically reverses the current flow so that the rotor and stator magnets repel each other over and over again in a sequence that causes the rotor to spin. In other words, the spinning motion is caused by a changing magnetic field, produced by a commutator that connects the coils to the power source and reverses the current cyclically as the rotor turns. However, this technique limits torque and is subject to wear; therefore, it is no longer used for traction drives.
Modern electric cars instead use alternating current, supplied by an inverter. Here the dynamic, rotating magnetic field is created within the stator rather than the rotor. This characteristic eases the design constraints on the rotor, generally the more complicated of the two, which in turn eases the overall design challenge.
There are two kinds of AC motor: asynchronous and synchronous. We will focus on the synchronous ones because they generally perform better and more efficiently.
 A River Runs Through It: Advanced cooling puts water directly through the coil (left) rather than through a water jacket on the outside of the housing (right).Image: Martin Doppelbauer & Patrick Winzer
A River Runs Through It: Advanced cooling puts water directly through the coil (left) rather than through a water jacket on the outside of the housing (right).Image: Martin Doppelbauer & Patrick Winzer
Synchronous motors also come in two varieties. The more common is the permanent-magnet synchronous machine (PMSM), which uses permanent magnets embedded in the rotor. To make the rotor spin, a rotating magnetic field is set up in the stator, as noted above. This rotating field is produced by windings in the stator that are connected to an alternating-current source. In operation, the poles of the rotor’s permanent magnets are locked to the stator’s rotating magnetic field, which causes the rotor to spin.
This design, which is used in the Chevrolet Volt and Bolt, the BMW i3, the Nissan Leaf, and many other cars, can reach peak efficiencies as high as 97 percent. Their permanent magnets are generally made of rare earths; notable examples are the very powerful neodymium magnets developed in 1982 by General Motors and Sumitomo.
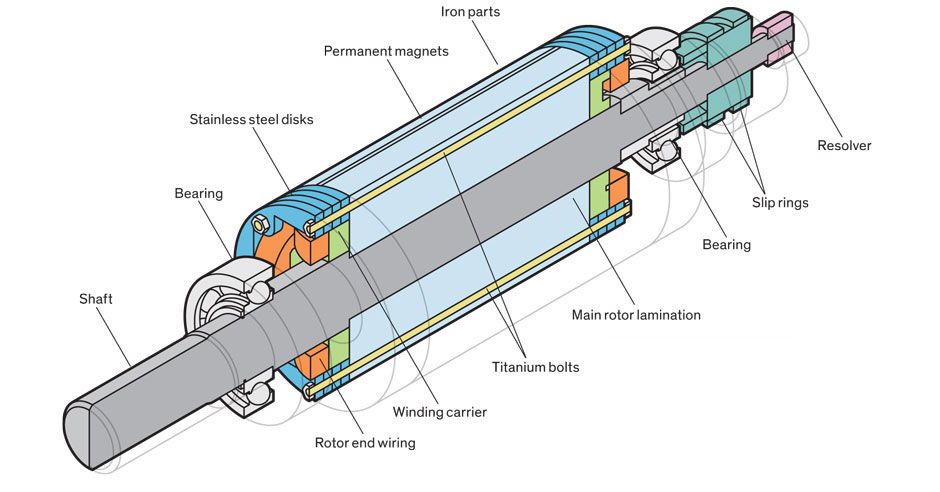
Salient-pole synchronous machines (SPSM) use electromagnets inside the rotor rather than permanent magnets. The poles are coils shaped like tubes, which point outward from the hub of the rotor like so many spokes on a wheel. These electromagnets in the rotor are powered by a DC source that’s connected to the coils via slip rings. Slip rings—unlike the commutator in a DC machine—don’t reverse the current in the rotor coils. The north and south poles of the rotor are therefore static, and the brushes don’t wear out as fast. And, as in the PMSM, the motion of the rotor is caused by the rotating magnetic field of the stator.
Because of the need to energize the rotor’s electromagnets through the slip rings, these motors typically have slightly lower peak efficiency, in the range of 94 to 96 percent. The advantage they have over PMSMs lies in the adjustability of the rotor field, which allows the rotor to develop torque efficiently at higher speeds compared with the PMSM. The overall performance, when used for car propulsion, can therefore be greater. The only manufacturer that uses this kind of motor in production cars is Renault, in its Zoe, Fluence, and Kangoo models.
EVs must be built with components that are not only highly efficient but also lightweight. The most obvious approach to improving the power-to-weight ratio of a motor is to reduce the size of the machine. However, such a machine will produce less torque for a given rotational speed. Therefore, to get the same power you’d then need to run the motor at higher revolutions per minute. Today’s electric cars run at around 12,000 rpm; motors for up to 20,000 rpm are being prepared for the next generation; and machines reaching 30,000 rpm are under investigation. The problem is that higher speeds require gearboxes of ever greater complexity, because the rpms are so great in comparison to what is needed to spin the tires. These complex gearboxes incur relatively high energy losses.
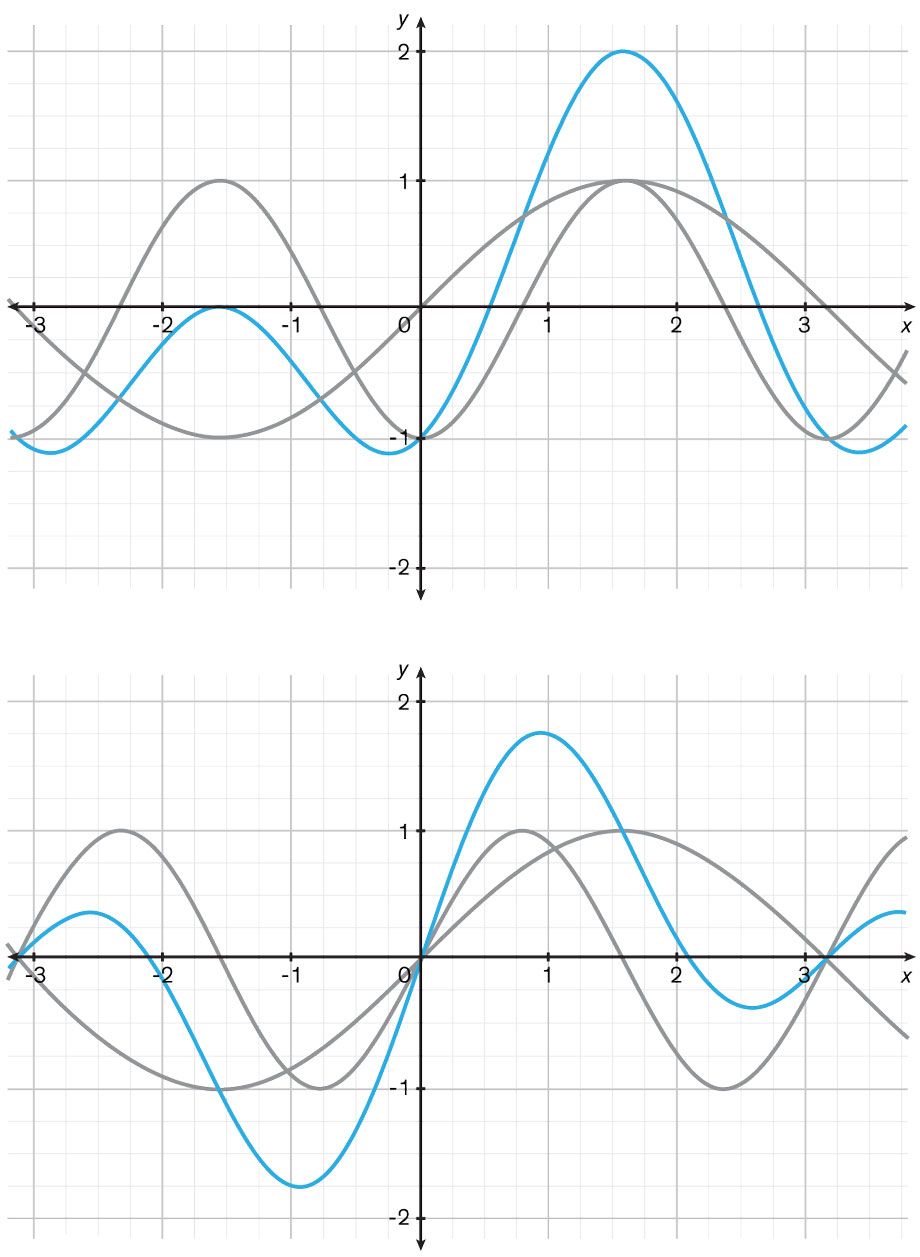
A Perfect Storm: In the authors’ design [top], the Lorentz force and the shifted inductance force [gray] sum at a maximum total force [blue] of 2. In a conventional motor [bottom], adding the two forces—the Lorentz force and the reluctance force [gray]—gives a total force [blue], which peaks at only 1.76, at a polar wheel angle of 0.94 rad. The difference in this example comes to 14 percent.
A second approach to improving the ratio of power to weight is to increase the strength of the motor’s magnetic field, which increases torque. That’s the point of adding an iron core to a coil, for although this step increases weight, it boosts magnetic-flux density by two orders of magnitude. Therefore, nearly all electric machines today use an iron core in the stator and in the rotor.
However, there is a drawback. When the strength of the field increases beyond a certain limit, iron loses all of its ability to boost flux. This saturation limit can be slightly influenced by the blending and the production process of the iron, but the most cost-effective materials are limited to some 1.5 Vs/m2 (Volt times second per square meter, or tesla). Only very costly and rare cobalt-iron vacuum steel materials can reach magnetic-flux densities of 2 teslas or more.
Finally, the third standard way of raising torque is to strengthen the field by sending more current through the coils. Again, there are limitations. Push more current through a wire and the resistive losses will increase, reducing efficiency and creating heat that can damage the motor. You could use wire made of a metal that conducts better than copper. Indeed, silver wire is available, but it would be absurdly expensive in this application.
The upshot is that the only practical way to increase the current is by controlling the heat. State-of-the-art cooling designs send cooling water directly alongside the windings rather than putting the water line further away, on the outside of the stator [see illustration, "A River Runs Through It"].
These steps all help to improve the weight-to-power ratio. In electric racing cars, where cost is no object, motors can weigh as little as 0.15 kilogram per kilowatt of output, on par with the best Formula One combustion engines.
In fact, we and our students designed and built such high-performance electric motors for a car entered in the Formula Student Racing Series three years ago. We built the motors at our laboratory in the Electrotechnical Institute at the Karlsruhe Institute of Technology, in Germany. Each year, the team built a new car with improved motors, gearboxes, and power electronics. There are four motors per car, one for each wheel. Each is just 8 centimeters in diameter, 12 cm in length, and 4.1 kg in weight, and each produces 30 kW of continuous power and peaks at 50 kW. In 2016, our team won the world championship.
So it can indeed be done, when cost is not an issue. The real question is, can such performance-boosting technologies be used in a mass-market motor, of the sort that might be used in a car you could buy? We have built such a motor, so the answer is yes.
We started with a single idea.Electric motors run equally well whether they are acting as motors or as generators, although such symmetry is not really needed for electric vehicles. With a car, you want an electric motor that performs better in motor mode than in generation mode, which is used only to charge the batteries during regenerative braking.
To understand the idea, consider a fine point of how a PMSM motor works. In such a motor, there are actually two forces that create motion. First, there is the force caused by the permanent magnets in the rotor. When currents flow through the copper coils of the stator, they create a magnetic field. Over time, the current is advanced from one coil to the next and thereby causes the magnetic field to rotate. This rotating stator field attracts the permanent magnets of the rotor so that the rotor starts moving. This principle depends on what is known as the Lorentz force, which affects a charged particle moving through a magnetic field.
But modern electric motors also get extra power from reluctance—the force that attracts a block of iron to a magnet. So the rotating stator field attracts both the permanent magnets and also the iron of the rotor. The Lorentz force and the reluctance work hand in hand, and—depending on the motor design—they are about equally strong. Both forces are nearly at zero when the rotor’s magnetic field and the stator’s are perfectly aligned. As the angle between the fields increases, the machine develops mechanical power.
In a synchronous machine, the stator field and the rotor rotate in tandem, without the lag found in asynchronous machines. The stator field has a particular angle with respect to the rotor, an angle that can be varied freely moment by moment during operation for highest efficiency. The optimum angle for producing torque at a given current can be calculated beforehand. It is then adjusted—as the current changes—by a power electronics system that feeds alternating current to the stator windings.
But here’s the problem: As you move the stator field with respect to the rotor position, the Lorentz force and the reluctance force each wax and wane. The Lorentz force increases according to a sinusoidal function that reaches its peak at a point 90 degrees from the reference position (which is the point at which the stator and rotor fields are aligned). The reluctance force, however, cycles at twice the frequency and therefore peaks at a 45-degree displacement [see graphs, "A Perfect Storm"].
Because the two forces reach their peaks at different points, the peak of the motor’s overall force is less than the sum of its parts. Let’s say in a particular machine design, at a particular point in the operation of the motor, 54 degrees happens to be the optimum angle for peak overall force. In this case, that peak would be 14 percent less than the peaks of the two forces combined. That’s the best compromise that this design can provide.
If we could reengineer this motor so that the two forces peaked at the same point in the cycle, motor power would improve by 14 percent—at no extra cost. The only feature you would lose is the efficiency of the machine when it is operating as a generator. And, as we’ll explain later on, we have found a way to restore even this feature, so the machine can better recover energy during braking.
Designing a motorthat perfectly aligns the stator field with the rotor field is no easy task. The challenge, basically, comes down to combining the PMSM and SPSM into a new hybrid design. The result is a hybrid synchronous machine with a displaced reluctance axis. In a nutshell, this machine uses both wires and permanent magnets to create a magnetic field within the rotor.
Others had tried (and then abandoned) this idea, but they had wanted to use permanent magnets only to strengthen the electromagnetic field. Our innovation was to use the magnets only to shape the field precisely, so as to optimally align the two forces—the Lorentz force and the reluctance force.
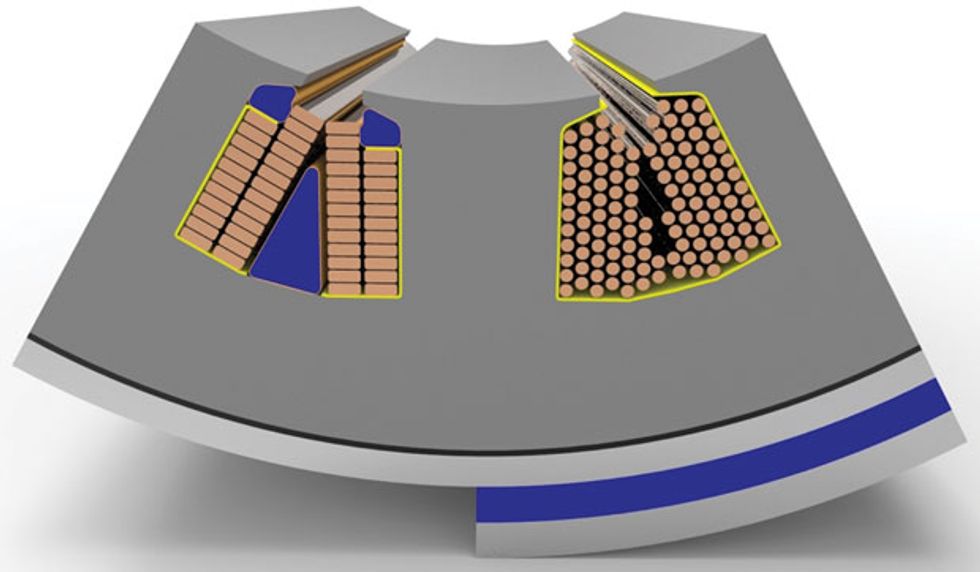
Our main design problem was in finding a rotor construction capable of shaping the field, yet sturdy enough to run at high speeds without coming apart. Our design’s innermost part is the rotor lamination, which carries the copper winding on an iron core. We glue permanent magnets to the shoulders of the poles of this core; additional nibs on the poles prevent them from ever flying away. To hold everything in place, we drove strong but lightweight titanium rods through the electromagnetic poles of the rotor using nuts to tighten the rods to stainless steel rings on both faces of the rotor.
We also found a way around our original motor’s flaw of reduced torque when running as a generator. We can now alter the direction of the field in the rotor so that the generation needed for regenerative braking is just as powerful and efficient as the motor operation.
 A Class Project: This Formula Student racing car used special motor-cooling techniques.Photo: KA-Raceing
A Class Project: This Formula Student racing car used special motor-cooling techniques.Photo: KA-Raceing
We accomplished this by reversing the current in the rotor winding when the machine is acting as a generator. Here’s why that works. First, consider the rotor of our original design. Moving along the perimeter of the rotor reveals a particular sequence of the north (N) and south (S) poles of the electromagnetic (E) and permanent magnetic (P) sources: NE, NP, SE, SP. This pattern repeats itself as many times as there are pole pairs. By reversing the flow of the current in the rotor winding, the electromagnetic poles—and they alone—change direction, and the pole order now becomes SE, NP, NE, SP, and so forth.
If you take a closer look at these two progressions, you’ll see that the second progression is like the first one, only backward. This means that the rotor can be used either in motor mode (the first sequence) or in generator mode (the second sequence), with the rotor current going in the opposite direction from the first. This way, our machine works more efficiently than conventional motors both as a motor and as a generator. On our prototype, changing the current takes less than 70 milliseconds, which is easily fast enough for use in cars.
Last year we built a prototype motor on a workbench and subjected it to thorough testing. The results are clear: Using the same power electronics, stator parameters, and other design constraints as a conventional motor, the machine is able to produce almost 6 percent more torque and attain 2 percent higher peak efficiency. And in the driving cycle the improvement is even better: It requires 4.4 percent less energy. That means a car that would have gone 100 kilometers on a charge can, with this motor, go 104.4 km. The extra range comes cheaply because our design incorporates only a few additional parts, which are much less expensive than adding extra batteries.
We are in contact with several original equipment manufacturers that find the concept interesting, though it will be some time before you see one of these asymmetric motors in a production car. When it does show up, though, it should eventually become the new standard, because getting all you possibly can from the energy you have at hand is a top priority for carmakers—and for society at large.
This article appears in the July 2017 print issue as “A Lighter Motor for Tomorrow’s Electric Car.”
About the Author
Martin Doppelbauer holds the chair for hybrid electric vehicles at the Institute of Electrical Engineering of the Karlsruhe Institute of Technology, in Germany. Patrick Winzer is a research assistant and Ph.D. candidate there.