
The United States skipped a step in the space race. Before NASA sent the first astronauts to the moon in 1969, it sent robotic scouts to crash into the lunar surface, land on it, and map it from orbit. The last three Apollo missions included lunar rovers driven by the astronauts. But in those rushed years to be first, the United States never sent a robotic rover, a good way to look at the lunar landscape close up. Only the Soviet and Chinese governments have. Other countries have tried and failed.
Now, 50 years later, the United States is making up for lost time—but if plans hold up, its first remote-controlled rover won’t be sent by NASA, or SpaceX, or some other large space agency or company. The rover is called Iris, and it’s largely the work of students at Carnegie Mellon University, in Pittsburgh.
Iris is tiny by space-rover standards—it’s about the size of a shoebox, with four wheels each about the size of a small pizza. But one lesson it teaches is that there’s no such thing as a small moon project. Mission managers estimate that 300 students have spent the equivalent of a century in work-hours on the rover since it began in 2017.
“There were no constraints—just come in at 2 kilograms or less!” laughs Raewyn Duvall, the program manager for the Iris rover. She got her Ph.D. at Carnegie Mellon while developing Iris, and she has stayed as a research associate to see the project through.
A Tiny Rover With an Uncertain Timeline
Iris is one of more than a dozen scientific payloads carried by the Peregrine lunar lander, built by Astrobotic Technology, a Pittsburgh-based company spun off from the university. If everything works, Peregrine Mission One will be sent to the Gruithuisen Domes region in the moon’s northern hemisphere by a new rocket called Vulcan Centaur, which is under development by the U.S.-based United Launch Alliance. The rocket is awaiting its first test flight, called Cert-1. But hey, if you’re launching a giant new booster, hoping it will become a workhorse of the space industry, why not shoot for the moon while you’re at it?
Cert-1’s launch date, once hoped for in 2019, has been delayed by COVID-19 and myriad technical issues. It’s now planned for the last quarter of this year.
William L. “Red” Whittaker, a professor of robotics at Carnegie Mellon and a leading name in the field, was the driving force behind Iris. “In space, what counts is what flies,” he said at a news briefing in April, before a hoped-for launch date in May. Whittaker is a cofounder of Astrobotic, where Iris and Peregrine are among several privately built lunar projects in the pipeline. Scientists want to find and harvest water ice near the moon’s south pole, potentially useful for future missions and, therefore, in Whittaker’s words, “the most valued resource in the solar system.”
Simple, But (Hopefully) Effective
If you were Whittaker’s student team, how would you squeeze everything into a 2-kg rover? An early design showed a small two-wheeled vehicle trailing its tail, but that was nixed because it couldn’t back up. They wanted to power it with photovoltaics, but that was nixed because articulated solar panels would add mass and complexity—and also, being so low to the ground, they might get coated with lunar dust. Lithium-ion batteries became the final compromise—safe and reliable, but if Iris is working well, it will probably drain them in fewer than 50 hours.
The final version is as simple as possible. It is symmetrical, with a camera at each end, so it makes no difference whether it goes forward or backward. It has no suspension. It has a skid-steer system, able to turn in place by turning the wheels on each side in opposite directions. The chassis and wheels are made of carbon fiber—strong and lightweight, though Duvall says that if there were any microfractures, they’d be hard to detect. That’s one of the necessary trade-offs to keep Iris small. “Being a university project,” she says, “we were willing to take on more risk than a government project or anything like that.”
The Peregrine lander is a squat, four-legged ship, designed to accommodate many different sorts of lunar projects. Iris is firmly clamped to the bottom of its payload deck. The flight plan calls for Peregrine to touch down after local sunrise at the landing site. Then, presuming everything checks out, two hold-down mechanisms open and the little rover falls about a meter, in the low lunar gravity, to the ground below.
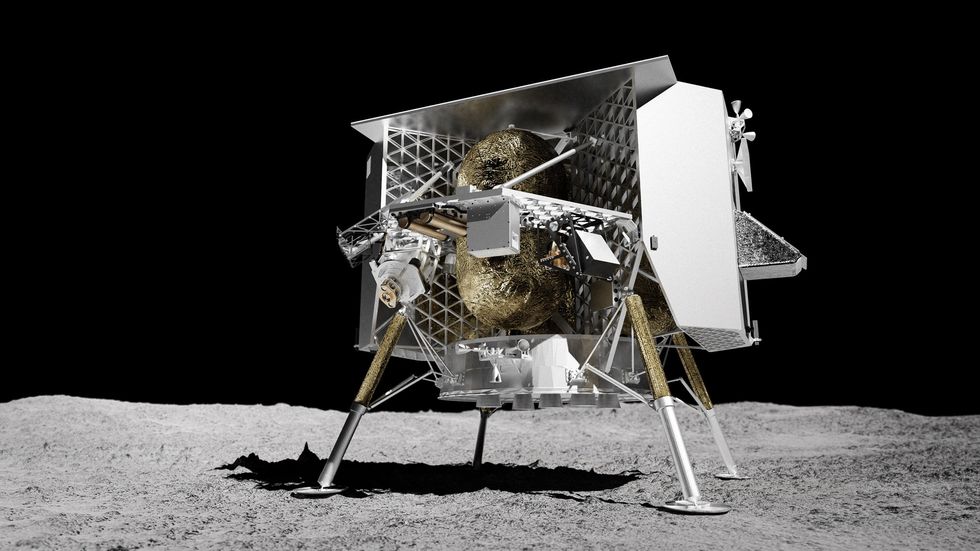 Once the Peregrine lander has safely landed on the moon, the Iris rover will drop from its payload deck in the center.Astrobotic Technology
Once the Peregrine lander has safely landed on the moon, the Iris rover will drop from its payload deck in the center.Astrobotic Technology
“In order to save mass, we don’t have a ramp, we don’t have a fancy mechanism, we just have to survive the drop down to the lunar surface,” said Nicholas Acuna, a student who served as mechanical lead engineer for the project while getting his master’s degree.
The rover and other payloads relay their signals to Earth via a wireless local area network (WLAN) on the lander—not unlike what you’d find in buildings and homes on Earth. The rover is not autonomous; Duvall says that in the busy couple of Earth-days that it’s active, it will probably travel 30 centimeters at a time on average, send an image of whatever is in front of it, and wait for more instructions. It may travel only a couple of hundred meters before its batteries are depleted, but even that, Duvall says, would prove that a lunar robot is in anyone’s reach.
“It’s going to be a great success when we deploy,” Duvall says. “It’s going to be a great success when we get any sort of telemetry back from it. It’s going to be a success when we take a nice image, or even any image at all. Everything that happens is going to be—wow, we did it!”
13 July 2023 UPDATE: This story was updated to provide additional details on the launch plans for the Cert-1 mission.
- NASA Begins Testing Next Moon Rover - IEEE Spectrum ›
- Forgotten Soviet Moon Rover Beams Light Back to Earth - IEEE ... ›


