
A seagoing robot that Canadian researchers are testing in the Caribbean, Aqua can swim autonomously and respond to a diver’s visual cues, using video cameras as its “eyes.”
On a white sand beach tucked between gleaming upscale resorts along the west coast of Barbados, a group of sunburned computer scientists, graduate students, and technicians look on intently as a small canary-yellow robot ambles up and down the beach. A few curious beachgoers soon join them. “Looks rather lovable, doesn’t it?” a British tourist remarks.
The robot is more than just lovable. With six rotating flippers, three on each side of its boxy metal carapace, this machine is amphibious, capable of both walking and swimming—an attribute that is unique in the robot world. As more onlookers gather, the little robot heads out through the surf and disappears into the turquoise waters that surround this Caribbean island.
The mechanical hexapod, called Aqua, is the latest in a series of seagoing robots our research group at McGill University, in Montreal, has been developing in collaboration with teams led by Michael Jenkin at York University, in Toronto, and Evangelos Milios at Dalhousie University, in Halifax, N.S., Canada. Our goal is to develop an underwater vehicle that can autonomously explore and collect data in aquatic environments while surviving the harsh saltwater conditions and often turbulent waters of the open sea. In building Aqua, we are tackling one of the most challenging topics in robotics: integrating vision and locomotion into an amphibious machine that can determine what it is “seeing,” where it is, and where it is going.
But more than just providing an interesting engineering exercise, Aqua, we hope, will someday play an important role in protecting coral reefs. The most biologically diverse and sensitive components of the world’s marine ecosystems, coral reefs are extremely fragile, and today they are in a state of crisis around the globe. Twenty percent of the world’s reefs have already been destroyed, mainly as a result of human activity. The remaining reefs urgently require protection. As our preliminary experiments in Barbados showed, underwater robots such as Aqua could help conservationists monitor the health of reefs and thus be in a better position to protect them.
In the past 30 years, marine scientists have come to rely on underwater vehicles, or UVs, to probe ocean depths that before were largely inaccessible to humans. Often, these vehicles reveal details about the ocean that couldn’t be obtained using data-gathering instruments deployed on ships or satellites.
For instance, at the Massachusetts Institute of Technology, in Cambridge, the Deep Water Archaeology Research Group has been using a robotic UV to create precise photomosaics of under water archaeological sites. Researchers at the Scripps Institution of Oceanography, in La Jolla, Calif., and at the Woods Hole Oceanographic Institution, in Massachusetts, have been experimenting with ocean robots to gather data on hurri canes and marine life. Also, a consortium of Canadian and U.S. universities is developing robotic crawlers to keep tabs on environmental conditions in the Pacific Ocean [see “ Neptune Rising,” IEEE Spectrum, November 2005].
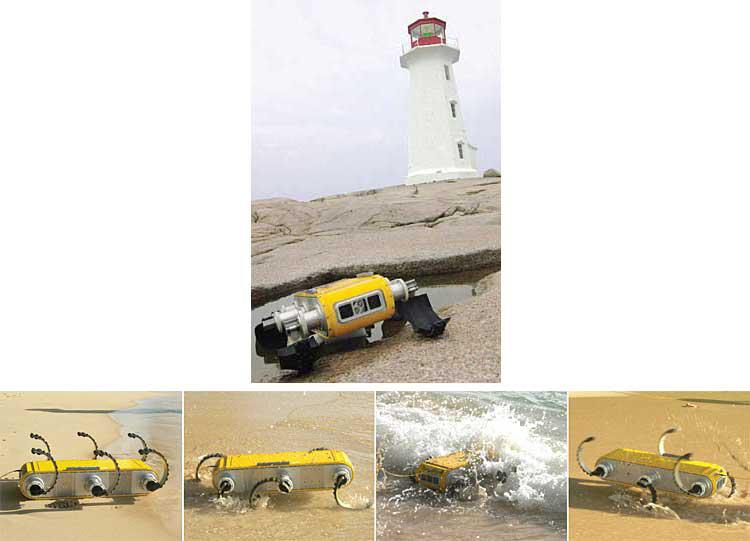
Unlike many earlier UVs, Aqua is intended for shallower waters, and its design reflects this. Although the majority of UVs are large and unwieldy—some require a crane to lower them into the water—Aqua measures only 50 by 65 by 13 centimeters and weighs just 18 kilograms. Aqua is thus easier to deploy: you can literally throw it into the water, or it can launch itself from the beach [see photo, "Bot's Night Out"].
The robot is also incredibly maneuverable. Most UVs are propeller-driven, so the range of actions they can execute is fairly limited. Aqua’s flippers move independently, enabling it to move forward, backward, up, down, and sideways; it can swim in a straight line or along a sinusoidal or helical path, and it can perform tight somersaults and rolls [see slideshow below, "The Life Aquatic"]. Using six flippers instead of four also helps stabilize the robot when it’s performing such tasks as recording video in rough waters.
Even though Aqua’s compact size and amphibious locomotion make it ideal for operating around coral reefs, some of our collaborators have other ideas for the robot. They believe Aqua could serve as the basis for other robotic machines that could do environmental inspections in deep water or near shorelines; perform routine monitoring in aquaculture tanks used to raise sea creatures; and also help human divers with predive safety checks and physical tasks underwater.
This past January, the Aqua team emerged from its laboratories in frigid Canada and headed south to sunny Barbados, where McGill University maintains its Bellairs Research Institute. In the months leading up to the January sea trial, our team had exhaustively experimented with the robot in the lab and in test tanks. But how would Aqua function, we wondered, in the uncontrolled conditions of the open sea?
This would be the third field test for the Aqua project, which began in 2004 with funding from the Natural Sciences and Engineering Research Council of Canada and the Institute for Robotics and Intelligent Systems, both in Ottawa. Since that time, Aqua’s hull and systems had evolved significantly, as we made its shell more pressure resistant, expanded its repertoire of amphibious gaits, and added enhanced vision hardware [see diagram, " Aqua's Anatomy"]. The newest model consists of an aluminum shell encasing two compact, off-the-shelf PC/104 computer modules: one for vision, the other for overall control of the robot.
A pair of lithium-ion rechargeable batteries powers all of the robot’s circuitry, including six independent DC motors, one for each flipper. We used plastic, aluminum, and rubber to fabricate appendages in a variety of sizes and shapes. For example, one set works like a dolphin’s flippers, while another functions more like a cockroach’s legs. With such insect-inspired limbs, Aqua can walk and even run with surprising agility [see photo, " Taking a Stroll,” and photos below]. It inherited its land prowess from a predecessor, RHex, a six-legged walking robot developed by U.S. and Canadian researchers in a program sponsored by the U.S. Defense Advanced Research Projects Agency. Eventually we hope to develop an appendage design that works well for both walking and swimming.
{kind=link}
Aqua carries three video cameras: two looking forward and one back. When the robot is being piloted remotely, the video is sent via a thin fiber-optic tether back to a boat, where a human operator can control the robot’s movements with a joystick. Alternatively, the robot can use the visual information to home in autonomously on targets such as a scuba tank or brightly colored objects, a robotic behavior known as “visual servoing.” Aqua is also capable of some intermediate forms of interaction. For example, an operator on the boat may be piloting Aqua while at the same time the robot makes some of its own decisions and responds to a diver’s visual cues.
The day before our departure in January, a problem cropped up with Aqua’s computer systems. Under certain conditions, when the recently upgraded vision module was activated, the control module would crash. For Ph.D. student Junaed Sattar, this was especially unwelcome news. The experiments Sattar had planned for Barbados used the vision system to evaluate the robot’s ability to autonomously track objects underwater. The problem meant that other scheduled experiments relying on vision might have to be canceled as well. After a late night in the lab, the group suspected something was wrong with the power supply feeding the vision and control modules, so a temporary fix was simply to increase the voltage to both.
Then, laden with six enormous watertight cases jammed with laptops, computer screens, cables, cameras, dive gear, underwater camera housings, and, of course, our little yellow robot, our group headed for Barbados. For the initial set of sea trials, we used a room at the Bellairs facility’s main building and a ramshackle old beach house as our makeshift labs. We spent the first morning testing the walking gaits of the robot on the sand, putting it into the water to ensure it did not leak, checking the movement of the flippers, and proceeding with some of the locomotion experiments.
Idyllic as it may sound, working with expensive electronics on sandy beaches and in seawater is not easy. Even the simplest test demands exhaustive preparation to ensure that the circuits won’t be damaged by the corrosive salt water; the robot doesn’t get pummeled by rough currents, tides, and surf; and the researchers don’t injure themselves while balancing in the boat or scuba diving with the robot. Field-testing a robot in Barbados, in other words, is not all fun in the sun.
The first experiment, part of graduate student Philippe Giguère’s Ph.D. research, was to test a new gait, a hovering movement, in the open sea. In this maneuver, Aqua rotates each of its flippers at different speeds and in different directions. This allows the robot to remain in the same spot and slowly turn sideways. To Giguère’s delight, Aqua hovered perfectly, without any tweaking required. To celebrate the victory, we decided to take a short break to bask on the beach.
But while the team eagerly soaked up the tropical heat, Aqua did not fare so well. When we returned to our experiments several hours later, the robot would not respond, and it was actually too hot to touch. Lesson learned: like pasty northern researchers confined to the lab all winter, robots need to restrict their exposure to the tropical sun! Duly chagrined, the team retreated with Aqua to the refuge of our air-conditioned Bellairs laboratory.
Two problems needed solving. One was how to keep Aqua from overheating. Underwater, it worked fine. On land, keeping it in the shade as much as possible seemed to be the low-tech answer. The much larger problem, however, was how to make the vision and control modules operate optimally without crashing—the same problem that had plagued the robot before our departure from Montreal.
That evening’s troubleshooting established that any surge in the vision module’s energy demand would trigger a crash. After much contemplation, we decided to reroute the power to the vision and control modules independently, so that surges in one wouldn’t affect the other. It took a long and mostly sleepless night, but in the end we successfully rewired Aqua and felt we were ready for a second day of sea testing.
The next experiments would take place in deeper water, with the researchers monitoring Aqua from a boat. Divers accompanied the robot to depths of up to 14 meters while Aqua swam at 0.4 meters per second. Our perseverance the night before was paying off, as Sattar’s vision experiments went off without a hitch: the robot was able to follow a human diver automatically and respond to various visual cues. However, for those working on the rocking boat, with their eyes riveted to a computer screen, the day on the rolling sea took its toll. Unlike amphibious Aqua, some researchers are better off staying on land.
On our final day, we carried out one last, unplanned experiment: we removed the robot’s fiber-optic tether to test its unhindered movements and visual servoing while it operated fully autonomously. Given the unpredictable ocean, letting the robot go free could be disastrous, especially if it crashed into the coral or took off for the open ocean. But we needed to know if Aqua could operate all by itself. And so, with its tether removed, the yellow robot leapt off the boat, splashed into the water, headed for its human dive buddy—and started acting strangely. Instead of following the diver toward the reef, it mysteriously turned right, and it kept on turning right, swimming stubbornly in a circle. Perhaps it was a glitch in the programming; perhaps a piece of hardware was acting up. In any event, after a frustrating half hour, we decided to end the experiment, took Aqua out of the water, and went back to the lab. (Later, in a follow-up experiment in our test pool back home, we modified the data exchange between the vision and control modules, and this time Aqua behaved as programmed.)
On that final day in Barbados, we still had time to assist Katrine Turgeon, a marine biology student at McGill, with her research on reef fish. With biologist Donald L. Kramer, Turgeon has been studying the habitat of damselfish. One component of her work is to record the number and species of fish living near the reefs. The traditional way to collect such data is to lay out a measuring tape along the coral and then have a scuba diver write down what type of fish come within a specified distance of the tape. That method can be laborious, and divers, under the stresses of pressure and nitrogen buildup, can stay submerged only for short periods of time—typically about 50 minutes at 20 meters—and are restricted to about three dives per day. In addition, the diver’s presence and air bubbles may disturb the fish, thus biasing the data.
Aqua, which releases no bubbles and is much smaller than a human, can collect similar data using its underwater cameras while being less intrusive to the fish. True, Aqua can’t yet recognize coral or other stationary marine life, let alone moving fish. But the video data the robot collects can be analyzed by an expert, who can quickly determine the number and species of fish. In Barbados, Turgeon used Aqua to record some video samples, which she’s still studying to see how the fish are faring. The images will also provide a visual record of changes occurring on the reef. Such changes are often subtle and can go unnoticed until a reef suddenly deteriorates. If reef images are compared year to year, detrimental changes might be detected in time for appropriate conservation measures to be implemented.
In fact, the reefs closest to the Bellairs lab, once thriving with marine life, have recently become badly degraded as a result of coral bleaching caused by an imbalance in the relationship of two organisms, a coral polyp and a type of algae called zooxanthellae, that live symbiotically on the reefs. Reef degradation, however, is not unique to Barbados. Coral reefs throughout the Caribbean as well as in other tropical regions of the world are dying, confronted by a host of new threats, including rising sea temperatures, sedimentation from poor agriculture practices, and overfishing. Marine biologists urgently need techniques for monitoring, and subsequently protecting, the ecological integrity of reefs. We hope that Aqua and its progeny will soon be able to help in these conservation efforts. Perhaps swarms of these robots will one day carry out data collection on marine ecosystems, both autonomously and in tandem with biologists.
For next year’s sea trials, there is already more to look forward to, including the completion of Aqua 1.5, a faster, smaller, lighter, and more portable version of the robot. Its cameras will use faster digital video connections, the batteries will last longer (up from 2 hours to 5), the flippers will be sturdier and easier to change, and the outside casing will be able to withstand more than double the pressure, to a depth of 30 meters.
Although the warm Barbados waters provide a perfect outdoor laboratory, this year’s sea trials showed that taking research out of the controlled environment of the lab has its risks and challenges. Nevertheless, all the results—the successes as well as the failures—helped to advance our research. The difficult part now will be waiting until the next time to test our ideas again in the warm Caribbean.
About the Authors
MICHELLE THÉBERGE, a marine biologist, has been a consultant for the Aqua project. She is also a freelance writer based in Vancouver Island, Canada.
GREGORY DUDEK, a professor of computer science at McGill University, Montreal, is a principal investigator on the Aqua project and the director of McGill’s Centre for Intelligent Machines.
To Probe Further
Technical papers on Aqua’s control and vision systems are available at https://www.cim.mcgill.ca/~mrl/publications.html.
See more photos of Aqua and information on Barbados’s coral reefs at https://www.aquarobot.net.
For more on coral reefs, see https://reefsatrisk.wri.org and https://www.aims.gov.au/pages/research/coral-bleaching/scr2004.