The Conversation (2)

Peregrine, a drone-based ice-penetrating radar system, was tested over Norway’s Slakbreen glacier in March.
Eliza Dawson
DarkBlue2
I’m standing on top of 100 meters of ice, watching a drone crisscross the Slakbreen glacier on Norway’s Svalbard archipelago, more than 600 kilometers north of the mainland. I’m part of a team testing Peregrine—a fixed-wing unmanned aerial vehicle (UAV) equipped with miniaturized ice-penetrating radar, which can image the glacial ice all the way down to the bedrock below.
It’s –27 °C, dipping below –40 °C with wind chill—well below the operating temperature of most of the commercial equipment we brought for this expedition. Our phones, laptops, and cameras are rapidly failing. The last of our computers that is still working is sitting on top of a small heating pad inside its own little tent.
Harsh as the weather is here, we intend for Peregrine to operate in even tougher conditions, regularly surveying the Antarctic and Greenland ice sheets. These great masses store enough water to raise global sea level by 65 meters should they melt entirely. Although neither ice sheet is expected to melt completely anytime soon, their incredible scale makes even small changes consequential for the future of our planet. And the data that Peregrine will gather will help scientists to understand how these critical areas will respond to climate change.
Thomas Teisberg, an electrical engineering Ph.D. candidate at Stanford University, launches Peregrine at Norway’s Slakbreen glacier.
Getting below the surface
Scientists have long looked at changes in the surface height of ice sheets, using data collected from satellite-borne laser altimeters. This data has come in large part from ICESat, launched in 2003, and its successor, ICESat-2, launched in 2018. With information from these NASA satellites, scientists measure the change in elevation, which they use to infer the net impact of surface processes such as snowfall and melting and the rates at which the ice sheets release icebergs into the ocean.
These measurements are important, to be sure, but laser altimetry provides no direct information about what’s happening beneath the surface, including how the ice deforms and how it slides over the underlying rock.
And as we try to understand how ice sheets are responding to new climate extremes, these processes are key. How will changes in temperature impact the rate at which ice deforms under its own weight? To what extent will liquid water reaching the bottom of a glacier lubricate its bed and cause the ice to slide faster into the ocean?
Getting answers to these questions requires seeing beneath the surface. Enter ice-penetrating radar (IPR), a technology that uses radio waves to image the internal layers of glaciers and the bed beneath them. Unlike other more labor-intensive methods, such as drilling bore holes or setting up arrays of geophones to collect seismic data, IPR systems from their earliest days have been flown on aircraft.
Peregrine lands after a test flight in Norway.
In the 1960s, as part of an international collaboration, a U.S. Navy Lockheed C-130 Hercules transport was converted into an IPR-data-collection aircraft. The project (which I’ll discuss in a little more detail in a showed that it was possible to rapidly collect this type of data from even the most remote parts of Antarctica. Since then, IPR instruments have gotten better and better, as has the means of analyzing the data and using it to predict future sea-level rise.
Meanwhile, though, the aircraft used to collect the data have changed comparatively little. Modern instruments are often flown on de Havilland Canada DHC-6 Twin Otters, which are two-engine turboprops, or Basler BT-67s, which are modified Douglas DC-3s. (Some Baslers flying missions in Antarctica today flew World War II missions in their past life.) And while support for these operations varies by country, the demand for new data is outpacing the ability of crewed aircraft to collect it—at least with a price tag that doesn’t put it out of reach for all but the most well-funded operations.
Collecting such data today just shouldn’t be that hard.
That’s why I and other students in Dustin Schroeder’s Stanford Radio Glaciology lab are developing several novel ice-penetrating radar systems, including Peregrine.
Peregrine is a modified UAV carrying a miniaturized ice-penetrating radar that we designed around a software-defined radio. The radar system weighs under a kilogram—featherweight compared with conventional IPR systems, which take up entire equipment racks in crewed aircraft. The whole package—drone plus radar system—costs only a few thousand dollars and packs into a single ruggedized case, about the size of a large checked bag.
But to truly understand why we felt we need to get Peregrine out into the world now, you need to know a bit about the history of data gathering with ice-penetrating radar.
A satellite failure creates an opportunity for radar
The first large-scale IPR surveys of Antarctica began in the late 1960s when a group of American, British, and Danish geoscientists mounted a set of radar antennas under the wings of a C-130. Predating GPS, the project recorded flight paths using internal navigation systems and known ground waypoints. The system recorded radar returns using a cathode-ray tube modified to scan over a passing reel of optical film, which the researchers supplemented with handwritten notes. This effort produced hundreds of rolls of film and stacks of notebooks.
After the project ended in 1979, various national programs began carrying out regional surveys of both Antarctica and Greenland. Although they were initially limited in scope, these programs grew and, crucially, began to collect digitized data tagged with GPS coordinates.
 The Slakbreen glacier, located on Norway’s Svalbard archipelago [enlarged view] in the coldest part of the country, was selected for testing Peregrine because it was unlikely to contain liquid water, which would interfere with imaging of the bedrock below.
The Slakbreen glacier, located on Norway’s Svalbard archipelago [enlarged view] in the coldest part of the country, was selected for testing Peregrine because it was unlikely to contain liquid water, which would interfere with imaging of the bedrock below.
In the late 2000s, IPR surveying got an unexpected boost. ICESat lost one laser altimeter after just 36 days of data collection in 2003, and by late 2009 all the satellite’s lasers had stopped working. Laser altimetry’s problems would seem to have no connection to aircraft-based IPR surveys. But with ICESat-2 still years away from launching and a favorable political environment for public earth-science funding in the United States, NASA organized Operation IceBridge, a large-scale aircraft-based campaign to cover the laser-altimetry data gap in Greenland and Antarctica.
Although the primary purpose was collecting laser altimetry, the use of aircraft instead of satellites meant that other instruments could be easily added. At the time, two U.S. institutions— the University of Texas Institute for Geophysics and the Center for Remote Sensing and Integrated Systems (CReSIS) at the University of Kansas—had been developing improved IPR instruments, so IPR was ready to get on board.
Between 2009 to 2019, the aircraft of Operation IceBridge flew more than 350,000 kilometers over the Antarctic while collecting IPR data. During this same period, the National Science Foundation’s Investigating the Cryospheric Evolution of the Central Antarctic Plate (ICECAP) program funded more than 250,000 kilometers of additional Antarctic IPR data.
Operation IceBridge enabled a huge jump in the amount of IPR data collected worldwide. While other organizations around the world also gathered and continue to gather IPR data, particularly the British Antarctic Survey and the Alfred Wegener Institute, IceBridge took U.S.-led data collection from being almost negligible in most years to being the main source of data while the project was in operation.
 As Peregrine climbs into the air over the Slakbreen glacier, the system’s red antennas are clearly visible under the wings.Eliza Dawson
As Peregrine climbs into the air over the Slakbreen glacier, the system’s red antennas are clearly visible under the wings.Eliza Dawson
In 2018, IceSat-2 launched, heralding the end of Operation IceBridge. Some IPR surveying continued, but the rate of data collection since 2018 has significantly lagged the scientific demand for such observations.
Adding to the need for better ice-monitoring tools is a recent shift in the type of IPR data that scientists see as important. Historically, these radar measurements have been used to identify the thickness of the ice above its bed of rock or sediment.
Bed topography, with some exceptions, does not change on time scales relevant to people. So collecting this kind of IPR data could generally be a one-time—or at least infrequent—exercise, ending once enough data was gathered to build a sufficiently detailed map of the bed of a glacier or ice sheet.
But the depth of the ice to the bed isn’t the only important information hidden below the surface. For one, IPR data reveals internal layering in the ice caused by changes in the composition of the snow that fell. The shape of these internal layers provides hints about the current and past flows of the ice.
![Red and green solid lines, and a black dotted line, on a white background [left]. A black and white image that looks like a strip of paper bent to form a rough S-shape.](https://spectrum.ieee.org/media-library/red-and-green-solid-lines-and-a-black-dotted-line-on-a-white-background-left-a-black-and-white-image-that-looks-like-a-stri.jpg?id=34762242&width=980) Peregrine flew a pattern [left, red line] spanning an area roughly 0.6 square kilometers over the Tellbreen glacier, also on the Svalbard archipelago. The drone’s ice-penetrating radar mapped the ground below the glacier and also the layers within it. The 3-D visualization [right] created from the data shows those layers as faint lines and the bedrock as a brighter line.
Left: Chris Philpot; source: Stanford Radio Glaciology Lab; Right: Thomas Teisberg
Peregrine flew a pattern [left, red line] spanning an area roughly 0.6 square kilometers over the Tellbreen glacier, also on the Svalbard archipelago. The drone’s ice-penetrating radar mapped the ground below the glacier and also the layers within it. The 3-D visualization [right] created from the data shows those layers as faint lines and the bedrock as a brighter line.
Left: Chris Philpot; source: Stanford Radio Glaciology Lab; Right: Thomas Teisberg
Scientists can also look at the reflectivity of the bed, which can reveal the likelihood of liquid water being there. And the presence of water can give indications about the temperature of the surrounding ice. The presence of water plays a crucial role in how fast a glacier flows, because water can lubricate the base of the glacier, causing more rapid sliding and, consequently, faster mass loss.
All of these are dynamic observations that may change on an annual or even seasonal basis. So having just one radar survey every few years isn’t going to cut it.
Gathering more frequent data using just crewed flights is difficult—they are expensive and logistically challenging, and, in harsh environments, they put people at risk. The main question about how to replace crewed aircraft is which direction to go—up (a constellation of satellites) or down (a fleet of UAVs)?
A handful of satellites could provide global coverage and frequent repeat measurements over many years, but it isn’t the ideal platform for ice-penetrating radar. To get the same power per unit area on the surface of the ice as a 1-watt transmitter on a UAV flying at an altitude of 100 meters, a satellite in orbit at 400 kilometers would need a roughly 15-megawatt transmitter—that’s more than three times the maximum power for which SpaceX’s Starlink satellites have been licensed by the Federal Communications Commission.
Another challenge is clutter. Imagine you have an antenna that emits power primarily within a 10-degree cone. You’re trying to observe the bottom of the ice sheet 1.5 km below the ice surface, but there’s a mountain range 35 km away. From 400 km up, that mountain range is also being illuminated by your antenna and reflecting energy back much more strongly than the echo from the bottom of the ice sheet, which is attenuated by the 1.5 km of ice it passed through each way.
At the other end of the spectrum of options are UAVs, flying even closer to the ice than crewed aircraft can. Researchers have been interested in the potential of UAV-borne radar systems for imaging ice for at least a decade. In 2014, CReSIS fielded a 5-meter-wingspan radio-controlled aircraft with a miniaturized version of its IPR system. The design made clever use of the existing wing geometry to provide low-frequency antennas, albeit with a small bandwidth that limited data quality.
Since this pathfinding demonstration, much of the research focus has shifted to higher-frequency systems, sometimes called snow radars, designed to image the near surface to better understand mountain snowpacks, snow cover on sea ice, and the layering structure in the top few meters of ice sheets. CReSIS has tested its snow radar on a small autonomous helicopter; more recently, it partnered with NASA and Vanilla Unmanned to fly its snow radar on a massive 11-meter-wingspan UAV that can stay aloft for days at a time.
There’s still a need, though, for IPR imaging through ice sheets, with a high enough bandwidth to distinguish internal layers and a price tag that allows for widespread use.
Enter Peregrine
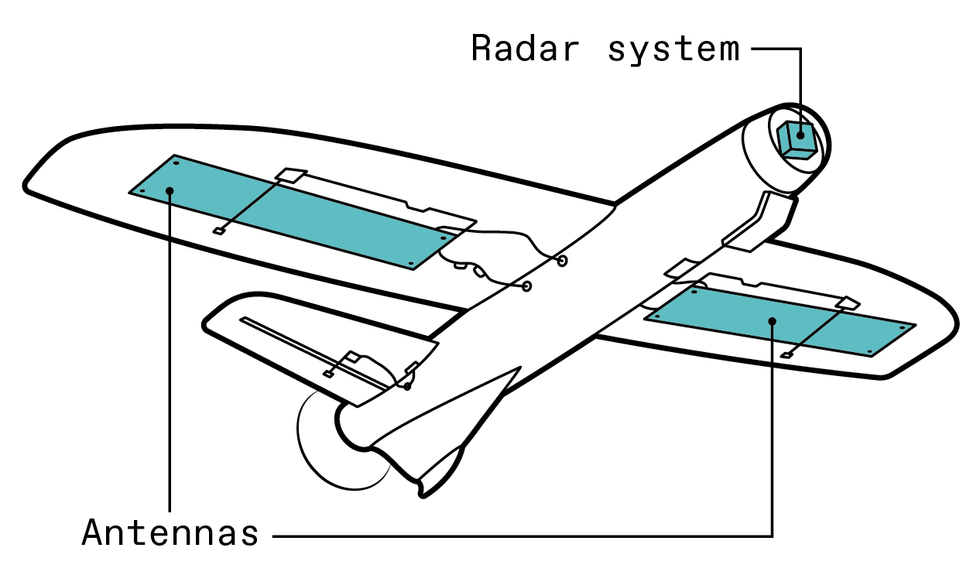 The software-defined radio and other electronics that make up the ice-penetrating radar, shielded to avoid interference with GPS signals, sits in the nose.Chris Philpot
The software-defined radio and other electronics that make up the ice-penetrating radar, shielded to avoid interference with GPS signals, sits in the nose.Chris Philpot
Here’s where Peregrine comes in. The project was started in 2020 to build a smaller and more affordable system than those attempted previously, now made possible by advances in fixed-wing UAVs and miniaturized electronics.
We knew we couldn’t do the IPR with off-the-shelf systems. We had to start with a blank slate to develop a system that was small and light enough to fit on an inexpensive UAV.
We decided to use software-defined radio (SDR) technology for our radars because these RF transmitters and receivers are highly customizable and shift much of the complexity of the system from hardware to software. Using an SDR, an entire radar system can fit on a few small circuit boards.
From the start, we looked beyond our first project, developing software built on top of Ettus’s USRP Hardware Driver application programming interface, which can be used with a variety of software-defined radios, ranging in cost from US $1,000 to $30,000 and in mass from tens of grams to multiple kilograms.
 Thomas Teisberg huddles over a laptop computer, partly shielded from the cold by a small tent [left]. The tripod supports the radio used to communicate with the drone. Later, Teisberg carries Peregrine back to the team after a test flight [right]. The testing was conducted as part of a field-based course offered by the University Centre in Svalbard (UNIS).
Eliza Dawson
Thomas Teisberg huddles over a laptop computer, partly shielded from the cold by a small tent [left]. The tripod supports the radio used to communicate with the drone. Later, Teisberg carries Peregrine back to the team after a test flight [right]. The testing was conducted as part of a field-based course offered by the University Centre in Svalbard (UNIS).
Eliza Dawson
We added a Raspberry Pi single-board computer to control our software-defined radio. The Raspberry Pi also connects to a network of temperature sensors, so that we could be sure nothing in our system gets too hot or too cold.
The SDR itself has two sides to it, one for transmitting the radar signal and one for receiving the echoes, each connecting to our custom-made antennas through amplifiers and filters. This entire system weighs a little under 1 kilogram.
Those antennas were tricky to design. IPR antennas require relatively low frequencies (because higher frequencies are more significantly attenuated by ice) and have relatively wide bandwidths (to achieve sufficient range resolution). Normally, these criteria would mean a large antenna, but our small UAV couldn’t handle a big, heavy antenna.
I started by considering a standard bowtie antenna, a type commonly used in ground-based radar systems. The initial design was far too large to fit even one antenna, much less two, on our little UAV. So using a digital model of the antenna, I adjusted the geometry to find an acceptable compromise between size and performance, at least according to the simulation software I was using.
I also built several prototypes along the way to understand how real antenna performance might differ from my simulations. The first of those I made from copper tape cut and pasted onto sheets of plastic. The later and final versions I fabricated as printed circuit boards. After a few iterations, I had a working antenna that could be mounted flat under each wing of our diminutive aircraft.
For the drone, we started with a kit for an X-UAV Talon radio-controlled plane, which included a foam fuselage, tail assembly, and wings. We knew that every piece of conductive material in the aircraft would affect the antenna’s performance, perhaps in undesirable ways. Tests showed that the carbon-fiber spar between the wings and the wires to the servo motors in each wing was creating problematic conductive paths between the antennas, so we replaced the carbon-fiber spar with a fiberglass one and added ferrite beads on the servo wiring to act as low-pass filters.
Fighting noisy signals
I thought we were ready. But when we took our UAV out to a field near our lab, we discovered that we could not get a GPS fix on the drone when the radar system was active. After some initial confusion, we discovered the source of the interference: our system’s USB 3.0 interface. To solve this problem, I designed a plastic box to enclose the Raspberry Pi and the SDR, 3D-printed it, and wrapped it in a thin layer of copper tape. That shielded the troublesome USB circuitry enough to keep it from interfering with the rest of our system.
Finally, we were able to fly our tiny radar drone over a dry lakebed on the Stanford campus. Although our system cannot image through dirt, we were able to get a strong reflection off the surface, and at that point we knew we had a working prototype.
![A man sits at a desk, one hand on computer keyboard and one hand on a mouse, looking at two computer displays. A copper colored box, that would fit in a hand, sits on the desk in front of the displays. [top] A computer visualization in two dimensions, in shades of purple, black, and yellow. Labels indicate \u201cdistance to reflector,\u201d \u201cdistance,\u201d and \u201cpower.\u201d](https://spectrum.ieee.org/media-library/a-man-sits-at-a-desk-one-hand-on-computer-keyboard-and-one-hand-on-a-mouse-looking-at-two-computer-displays-a-copper-colored.jpg?id=34785453&width=980) Thomas Teisberg reviews some of the data recorded by Peregrine. The small box on his desk with wires attached is part of Peregrine’s payload, a package that includes a software-defined radio, a Raspberry Pi, and other electronics wrapped in copper shielding. In this two-dimensional tracing of the data [above], the surface of the ice and shape of the bedrock are clearly visible. Top: Thomas Tesiberg; Above: Mai Bui
Thomas Teisberg reviews some of the data recorded by Peregrine. The small box on his desk with wires attached is part of Peregrine’s payload, a package that includes a software-defined radio, a Raspberry Pi, and other electronics wrapped in copper shielding. In this two-dimensional tracing of the data [above], the surface of the ice and shape of the bedrock are clearly visible. Top: Thomas Tesiberg; Above: Mai Bui
We carried out our first real-world tests six months later, on Iceland’s Vatnajökull ice cap, thanks to the help and generosity of local collaborators at the University of Iceland and a grant from NASA. That was a good spot, because from time to time, a nearby volcanic eruption spews volcanic material known as tephra over the surface of the ice cap. That tephra eventually gets buried under new snow and forms a layer under the surface. We figured these strata would serve as a good stand-in for the internal layering found in ice in Greenland and Antarctica. Although an abundance of liquid water in the relatively warm Vatnajökull ice prevented our system from probing more than tens of meters below the surface, these tephra layers were apparent in our radar soundings.
But these first trials did not go uniformly well. After one of our test flights, I discovered that the data we had collected was almost entirely noise. We tested every component and cable, until I found that the shield on one of the coaxial cables had broken and was only intermittently making a connection. With a spare cable and a generous application of hot glue, we were able to complete the rest of our testing.
For our next round of tests, we were aiming to image bedrock under a glacier, not just internal layers. And that’s why, in March of this year, we ended up on a glacier in the coldest part of Norway, where liquid water within the ice was less likely to interfere with our measurements. There we were able to image the bed of the glacier, as much as 150 meters below the surface where we were flying. Crucially, we also convinced ourselves that our system will work properly in the harsh environments we expect it to face in Antarctica and Greenland.
A drone fleet across Antarctica
Our present system is relatively small. It was designed to be inexpensive and portable so that research teams can easily bring it along on expeditions to far-flung spots. But we also wanted it to serve as a test bed for a larger UAV-borne IPR system with an operational range of about 800 km, one that is inexpensive enough to be permanently deployed to Antarctic research stations. With the 11 existing research stations as bases, at least one member of such a drone fleet could access nearly every part of coastal Antarctica. Though larger and more expensive than our original Peregrine, this next-generation UAV will still be far cheaper and easier to operate than crewed airborne systems are.
Operating a larger UAV, much less a fleet of them, is beyond what a few Ph.D. students alone can reasonably do, so we are launching a collaborative effort between Stanford University, the Scripps Institution of Oceanography, and Lane Community College, in Eugene, Ore., to get this new platform off the ground. If all goes well, we’re hoping we can have IPR UAVs surveying the Antarctic and Greenland ice sheets within three years. Doing so would no doubt help scientists studying the responses of Earth’s ice sheets to climate change. With permanently deployed UAVs able to cover most areas of active study, requests for new data could be fulfilled within days. Surveys could be repeated at frequent intervals over dynamic areas. And when rapid and unpredictable events occur, such as the collapse of an ice shelf, a UAV could be deployed to gather real-time radar data.
Such observations are just not possible today. But Peregrine and its successors could make that possible. Having the ability to collect this kind of radar data would help glaciologists resolve fundamental uncertainties in the physics of ice sheets, improve projections of sea-level rise, and enable better decision making about mitigations and adaptations for Earth’s future climate.
From Your Site Articles
Related Articles Around the Web
{"imageShortcodeIds":[]}


