
When DARPA announced that the Subterranean Challenge Final Event would take place in a giant cavern complex in Louisville, and that it would include elements of tunnels, caves, and the urban underground, we had very high hopes for what the agency would put together. And, predictably, DARPA vastly exceeded those hopes. Inside of the Louisville Mega Cavern, DARPA worked for months to construct an incredible course from scratch, full of the kind of detail that you'd expect to see on a movie set. But just like a movie set, it was all temporary, and even worse, very few people will ever be able to really appreciate what DARPA has done—the course was never open to the public, and most of the teams themselves only really experienced the course through their robots and during a very brief post-competition tour.
After the competition ended on Friday, though, DARPA did give any teams that were interested an opportunity to run their robots around the course for a couple of hours. We were able to tag along with Team CERBERUS and Team CSIRO Data61, the first and second place SubT Challenge winners (separated in score by just one single minute!), as they and their robots explored the course in person and unsupervised for the first (and last) time.
As you look through these pictures, try to appreciate everything that DARPA has done to make the SubT Final course as realistic as possible. Everything was designed and built and sculpted and painted entirely by hand, based on real underground environments. DARPA also added an assortment of robot-specific challenges for both perception and mobility, which had a side-effect of making some parts of the course challenging for humans to traverse as well. Inside, it was often very dark, very close, and frequently slippery and wet. I was thankful both for my hard hat and for the well-lit robots that I followed around the course with their teams of human operators as we explored DARPA's fantasy subterranean world.

Evan Ackerman/IEEE Spectrum
The slightly scary entrance to the Louisville Mega Cavern. It's dark in there. Really dark.






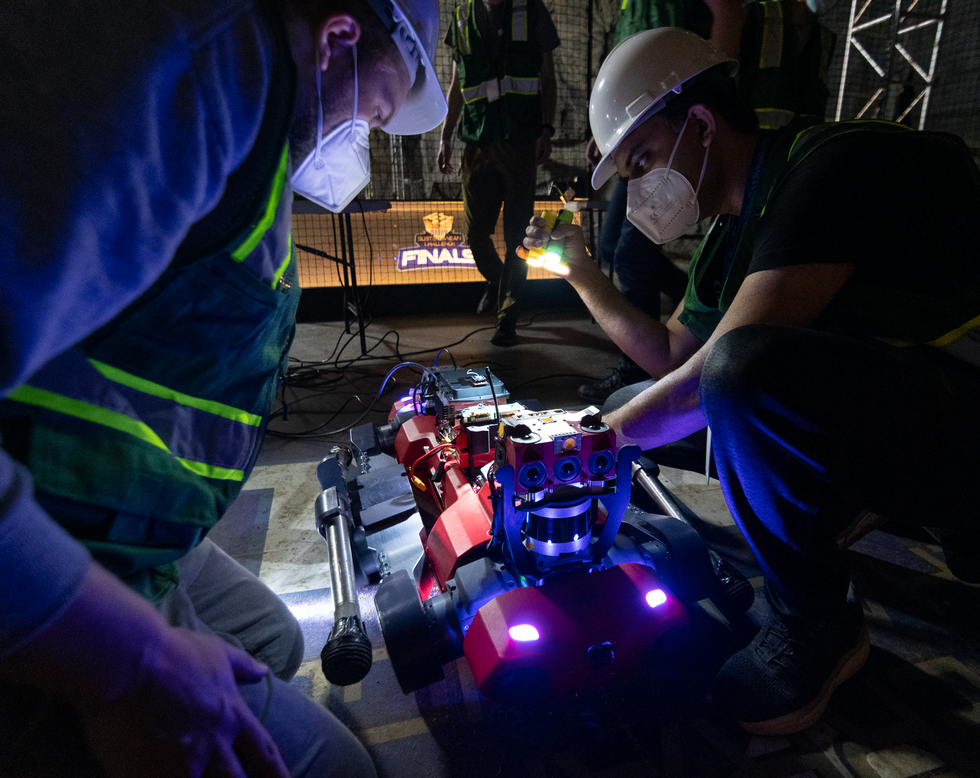





















Special thanks to Team CERBERUS and Team CSIRO Data61 for letting me tag along with them.
Last week, DARPA also posted some videos of the course, including walkthroughs with artifact placements and also remote footage of all of the final competition runs. We've included a couple below, but the rest can be found on DARPA's YouTube channel.
DARPA Subterranean Challenge Final Event Course Walkthrough - Artifact Configuration 3
DARPA Subterranean Challenge Finals Event Prize Round Scored Run CSIRO Data61
- DARPA SubT Final: How It Works and How to Watch - IEEE Spectrum ›
- DARPA SubT Finals: Meet the Teams - IEEE Spectrum ›
- DARPA SubT Finals: Robot Operator Wisdom - IEEE Spectrum ›


