

Imagine that you could toss an object such as a wrench into a container filled with tiny robots and, within seconds, the robots would "sense" the shape of the wrench and bind to each other to form a replica of the tool. Creating robots that could turn this sci-fi-like scenario into reality is the goal of an MIT team led by Professor Daniela Rus. They call the technology Smart Sand.
The project still has a long way to go. The robots the researchers have developed consist of relatively large cubes, each 12 millimeters on a side, but the team hopes to be able to shrink the modules in the future. In the mean time, the group is addressing another challenge: How to convey the shape of an object to lots of modules that have limited computational resources.
At this year's IEEE International Conference on Robotics and Automation (ICRA), in St Paul, Minn., Kyle Gilpin, one of the researchers, presented an algorithm capable of doing just that. He also showed video of a working prototype that, although it can duplicate only a very simple object, shows the potential of the technology.
Gilpin explains that each module, or smart pebble, has only a small amount of processing power and memory, so individual modules cannot store a complete digital map of the object to be assembled. Each has to acquire only a certain amount of information, and by sharing pieces of data they must solve the problem collectively.
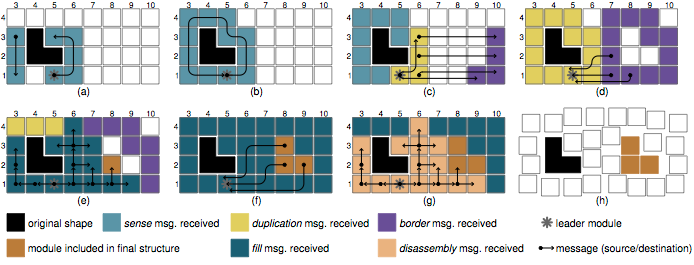
In the algorithm Gilpin and Rus came up with, an ensemble of modules first detects the border of the object. These ensemble then sends messages to another group of modules, which recreate the border pattern. Finally, these modules within the border attach to each other, whereas all other modules self-disassemble, leaving only the original and the replica. The illustration below shows the method step by step (click to enlarge).
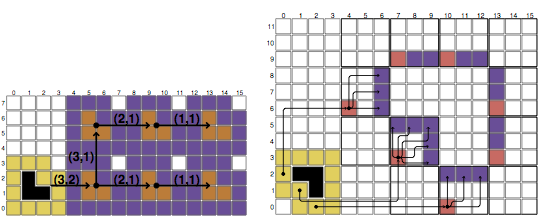
The researchers tested their algorithm hundreds of times using different shapes. They say the algorithm can handle communication failures among modules, and it can create multiple replicas of a single original (pictured below, left), or create bigger replicas (right). And they claim that the technique works efficiently for 3D objects as well (by slicing the object into 2D layers).
Shrinking the cubes remains the biggest challenge. Gilpin believes that they could eventually achieve dimensions of about 1 millimiter, in effect transforming their smart pebbles into smart sand, but that will take time. And one may wonder why we need smart sand in the first place when technologies like 3D printing already allow people to easily create replicas of objects.
He says one advantage is that objects built with smart sand could have sensing and processing capabilities. For example, you could build an electronic torque wrench. What's more, smart-sand-based objects are able to recycle themselves. So when you're done using your wrench, it would dissolve and turn into, say, a screwdriver. That's a futurist scenario, of course, but Gilpin is excited about the possibilities. "You don't need to carry all your tools with you," he says, "just a bag of sand."
Rus and Gilpin explain their results in the paper, "A Distributed Algorithm for 2D Shape Duplication with Smart Pebble Robots," presented at ICRA early this month.


