
A new sensor for robots is designed to make our physical interactions with these machines a little smoother—and safer. The sensor, which is now being commercialized, allows robots to measure the distance and angle of approach of a human or object in close proximity.
Industrial robots often work autonomously to complete tasks. But increasingly, collaborative robots are working alongside humans. To avoid collisions in these circumstances, collaborative robots need highly accurate sensors to detect when someone (or something) is getting a little too close.
Many sensors have been developed for this purpose, each with its own advantages and disadvantages. Those that rely on sound and light (for example, infrared or ultrasonic time-of-flight sensors) measure the reflections of those signals and must therefore be closely aligned with the approaching object, which limits their field of detection.
 Photos: Aidin Robotics
Photos: Aidin Robotics
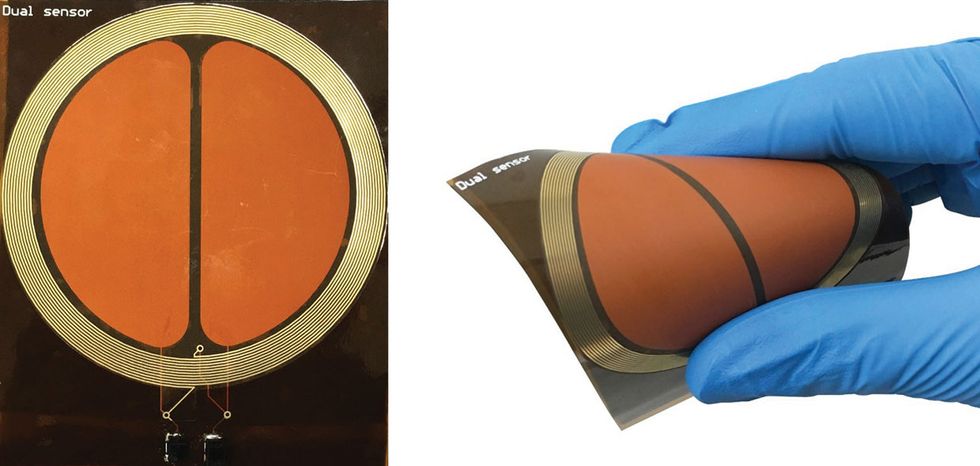
To circumvent this problem, a group of researchers in South Korea created a new proximity sensor that measures impedance. It works by inducing electric and magnetic fields with a wide angle. When a human approaches the sensor, their body causes changes in resistance within those fields. The sensor measures the changes and uses that data to inform the robot of the person’s distance and angle of approach. The researchers describe their design in a study published 26 February in IEEE Transactions on Industrial Electronics. It has since been commercialized by Aidin Robotics.
The sensor is made of electrodes with a flexible, coil-like design. “Since the sensor is highly flexible, it can be manufactured in various shapes tailored to the geometries of the robot,” explains Yoon Haeng Lee, CEO of Aidin Robotics. “Moreover, it is able to classify the materials of the approaching objects such as human, metals, and plastics.”
Tests show that the sensor can detect humans from up to 30 centimeters away. It has an accuracy of 90 percent when on a flat surface. However, the electric and magnetic fields become weaker and more dispersed when the sensor is laid over a curved surface. Therefore, the sensor’s accuracy decreases as the underlying surface becomes increasingly curved.
Every robot is different, and the sensor’s performance may change based on a specific robot’s characteristics. The latest version of the integrated sensor module, when installed on a curved surface, can detect objects from up to 20 centimeters away with an accuracy of 94 percent.
Lee says the device is already being used in some collaborative robot models, including the UR10 (by Universal Robots) and Indy7 (by Neuromeka Inc.). “In the future, the sensor module will be mass-produced and applied to the other service robots, as well as collaborative and industrial robots, to contribute to the truly safe work and coexistence of robots and humans,” he says.
This article appears in the May 2020 print issue as “A Proximity Sensor for Robots.”


