

Photo: Kyodo/AP Photo
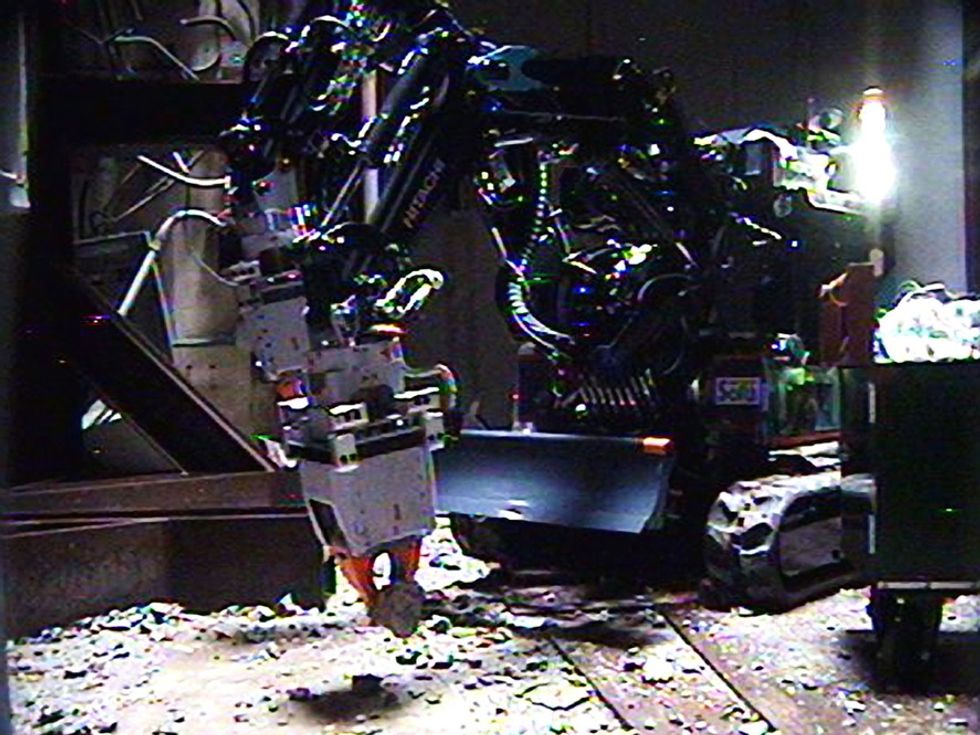
Has Arms, Will Travel: After the accident, the Japanese government gave grants to leading industrial companies to help them develop robots that can assist with cleanup efforts. Hitachi built the ASTACO-SoRa, whose two arms can be fitted with pinchers, cutting blades, or drills.









The Conversation (0)


