
The Mars Science Laboratory rover Curiosity landed on Mars in August of 2012. After a year of exploring Gale Crater, JPL engineers noticed some wear on Curiosity’s wheels, in the form of dents and small holes in the wheels’ 0.75mm thick aluminum skin. While not unexpected, the wear on the wheels kept increasing at a higher rate than JPL had planned for, and by early 2017 (after about 16km of driving), the rover had experienced the first breaks in the much thicker structural elements that hold its wheels together, called grousers.
Each of Curiosity’s wheels has 19 grousers, so one or two broken ones isn’t much of a concern. But if enough of the grousers snap off, the worst-case scenario is that the inside of the wheel could loosen and make contact with the cabling that connects the motor inside the wheel hub with the motor controller inside the body of the rover. That could potentially render the wheel inoperable, or even cause electrical damage that could mess up control of other motors around the rover.
JPL’s Wheel Wear Tiger Team (“Tiger Teams” being a thing that has a history at NASA going back to Apollo 13) took a look at the problem, and came up with some recommendations about where and how to drive that have been very successful at reducing wheel wear rates. But since there’s no way of eliminating wheel wear completely, they also came up with a backup plan that they could implement if the wheel damage approaches catastrophic. It involves Curiosity finding a nice sharp rock and using it to rip out the insides of its own wheels.
Every 1000 meters of driving, Curiosity pulls over and uses the Mars Hand Lens Imager (MAHLI) on the end of its robotic arm along with its Mastcam camera to snap some pictures of its wheels so that JPL can keep track of wheel wear. The images below show one of the flight wheels in pristine condition, along with a MAHLI image taken on 4 April 2021, showing extensive skin damage and a missing grouser on one of the rover’s middle wheels.
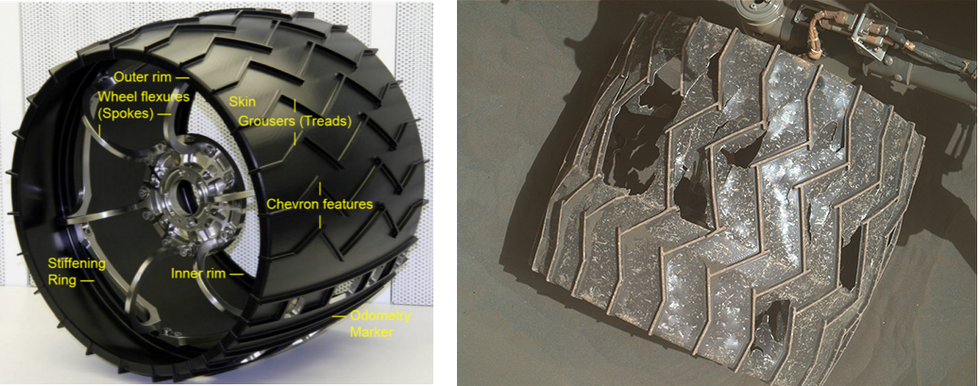 A new MSL flight wheel (left), compared to a MAHLI image of one of Curiosity’s middle wheels (right) taken on Mars on April 4, 2021.Images: JPL, NASA/JPL-Caltech/MSSS
A new MSL flight wheel (left), compared to a MAHLI image of one of Curiosity’s middle wheels (right) taken on Mars on April 4, 2021.Images: JPL, NASA/JPL-Caltech/MSSS
As of mid-April, Curiosity has driven a total of 25.246 km, and JPL has found one broken grouser on the right middle wheel along with three broken grousers on the left middle wheel, the third of which happened within the last 1000 meters of driving. The grousers on the front and rear pairs of wheels are all intact. The wheels will remain functional even if most of the aluminum skin is missing; it’s really the grousers that keep the structure of the wheel stable.
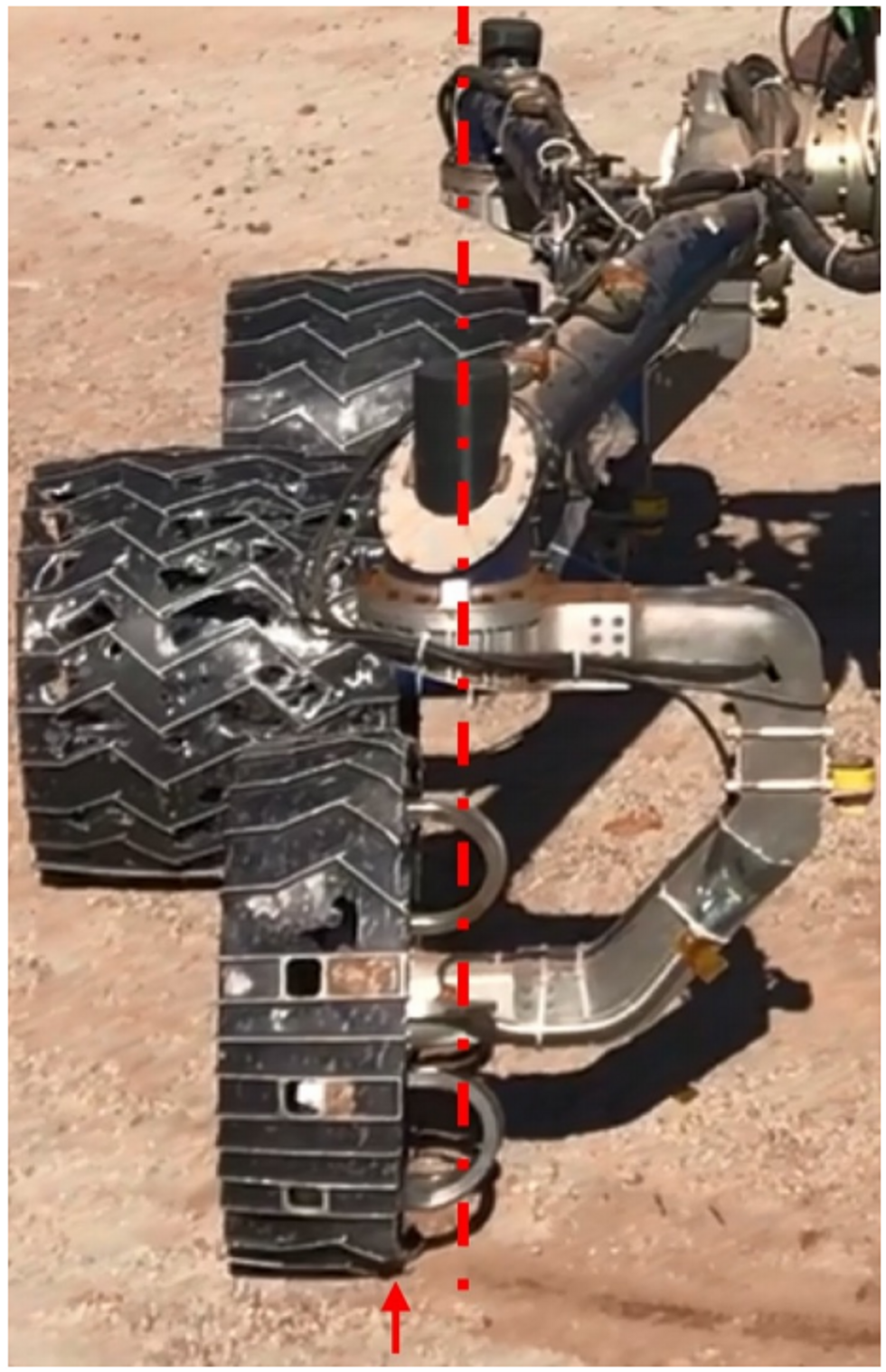
 An image showing the odometry features on Curiosity’s wheels, taken on Mars on January 26, 2017.Image: NASA/JPL-Caltech/MSSS
An image showing the odometry features on Curiosity’s wheels, taken on Mars on January 26, 2017.Image: NASA/JPL-Caltech/MSSS
In addition to the 19 grousers that go around the wheel, each wheel also has an odometry feature, which is a section of the wheel that has a pattern of holes in it. These holes help the rover visually track its progress, and they also spell out “JPL” in Morse code, because why not. The odometry feature is more structurally robust, and JPL expects that it’ll hang on even if all the grousers on a wheel break.
A “critical damage state” for one of Curiosity’s wheels, with all 19 grousers broken, would look something like this:
 Left: a “critically damaged” MSL flight wheel used for testing with 19 broken grousers. Right: JPL engineer Amanda Steffy holds a wheel that was tested to failure on the Scarecrow rover in the JPL Mars Yard.Images: JPL
Left: a “critically damaged” MSL flight wheel used for testing with 19 broken grousers. Right: JPL engineer Amanda Steffy holds a wheel that was tested to failure on the Scarecrow rover in the JPL Mars Yard.Images: JPL
The broken part of the wheel is the inner two-thirds; the outer third of the wheel (where the wheel connects to the hub) is supported by spindles along with an interior stiffening rig, and JPL has found that the grousers almost always break right where the edge of that that stiffening ring is. Extensive testing back here on Earth using a rover mobility analogue called Scarecrow has shown that even if the entire inner section of the wheel is completely broken off, Curiosity is more or less just fine driving on only the remaining outer third of the wheel, which JPL calls a “rimmed wheel.” The issue, though, is that the broken inner part of the wheel would be flopping around between the rimmed wheel and the body of the rover, and could cause problems with the wiring around the wheels.
 Scarecrow testing driving on a rimmed wheel.Photo: JPL
Scarecrow testing driving on a rimmed wheel.Photo: JPL
To be clear, Curiosity’s wheels are totally functional (if a little beat up) at the moment. It would take 14 broken grousers on a single wheel before JPL would formally consider taking further action. Their latest predictions, based on how much more driving the rover is likely to do and incorporating driving strategies that have substantially reduced wheel wear, suggest that 14 broken grousers won’t happen until somewhere around 2034. But as part of JPL’s Wheel Wear Strategic Plan, they came up with a potential solution for wheels in a critical damage state, called wheel shedding. The objective of wheel shedding is to take the broken inner two-thirds of the wheel and completely detach it from the rover to protect that fragile cabling and (hopefully) keep the rover roving. Obviously, the rover is not in the least equipped to do this by itself, but as it turns out Mars is covered in potential wheel shedding tools in the form of pointy rocks.
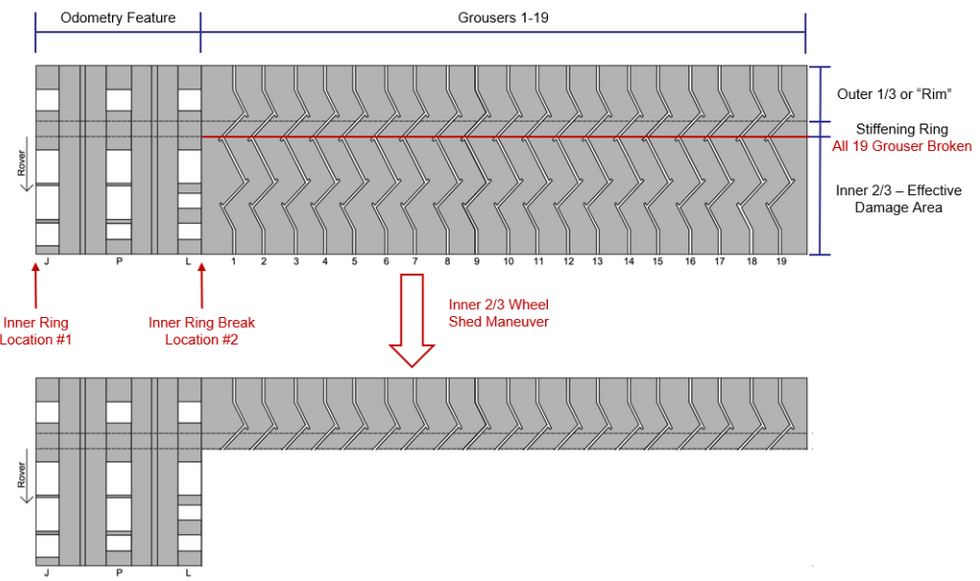 An diagram of an “unrolled” MSL wheel, showing at top the structure of a damaged wheel and at bottom a rimmed wheel after a successful shed maneuver.Image: JPL
An diagram of an “unrolled” MSL wheel, showing at top the structure of a damaged wheel and at bottom a rimmed wheel after a successful shed maneuver.Image: JPL
The idea here is for Curiosity to use a rock to deliberately create two additional breaks in the wheel (one each side of the innermost edge of the odometry feature), and then peel all the rest of the damaged wheel away. This is done via two maneuvers: a “Twist and Shout” maneuver to make the first break by catching the inner part of the wheel on a rock and twisting the wheel, followed by a “Pigeon Toe” maneuver, where the now mostly broken off part of the wheel is pressed up against the rock as the rover attempts to drive forward while wiggling the damaged wheel. If all goes well, the damaged section gets peeled away by the rock, and the rover continues on the outer third of the wheel, plus the leftover odometry section which would just kinda hang on for the ride.
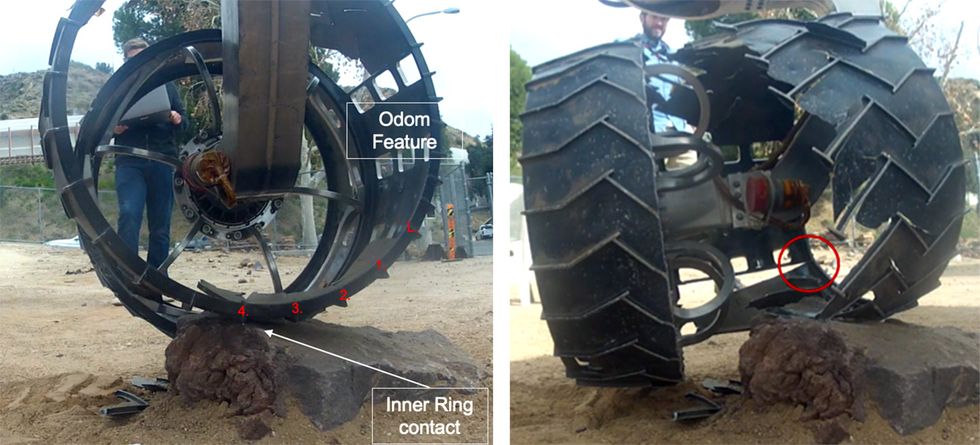 First, the rover positions its wheel on top of a rock (left). It then twists that wheel 90 degrees while driving straight with its other wheels, causing the damaged part of the wheel to bend and eventually break (right).Photos: JPL
First, the rover positions its wheel on top of a rock (left). It then twists that wheel 90 degrees while driving straight with its other wheels, causing the damaged part of the wheel to bend and eventually break (right).Photos: JPL
 After the first break is complete (left), the rover straightens the wheel, and drives back towards the rock, pushing the damaged wheel section up against the rock (right).Photos: JPL
After the first break is complete (left), the rover straightens the wheel, and drives back towards the rock, pushing the damaged wheel section up against the rock (right).Photos: JPL
 Alternating forward and backward driving motions with the damaged section against the rock causes a second break (left), shown from an overhead view (right).Photos: JPL
Alternating forward and backward driving motions with the damaged section against the rock causes a second break (left), shown from an overhead view (right).Photos: JPL
 With the shed maneuver complete, the rover drives off, leaving the damaged wheel behind.Photo: JPL
With the shed maneuver complete, the rover drives off, leaving the damaged wheel behind.Photo: JPL
JPL estimates that performing a shed maneuver would take between one and two months per wheel, but again, the wheels are doing okay for now. “Since other mitigations that the team has put in place are extending wheel life predicts further and further into the future, it is unlikely that we will need to perform a wheel shed maneuver,” JPL’s Evan Graser told us in an email. “There’s always a chance of reaching the end of a wheel’s life during the mission, but we’re many years away from even needing to make the decision whether to pursue shedding further.”
Graser is the Mobility & Mechanisms subsystem team lead for the Curiosity rover, and a member of the MSL Wheel Wear team. If Curiosity does get to that 14 broken grouser milestone, Graser says, they’d start taking another serious look at the wheel shed maneuver, since there’s still lots of stuff they’d have to figure out before performing the maneuver with the real rover on Mars. For example, JPL is not entirely sure how much of a problem that hanging odometry feature would be, and while they seem certain it’ll break off on its own at some point, it could potentially cause some problems before it does so.
It will also be necessary to refine the shed maneuver and better characterize how long it’ll take, and make sure they can get it to work on Mars, which is definitely not the easiest thing in the world, considering it’s off-world and all. “It’s much easier to make decisions and correct problems when you can simply walk around Scarecrow,” Graser says “It’s much harder on the actual vehicle where the only information we get is from our onboard cameras.”
Finding the right rock will also be a bit of a challenge. Mars is covered in rocks, but it’s also a big, dynamic place with lots of geologic diversity, and the shed maneuver requires a very specific sort of rock: embedded in the ground, 10-15 cm in height, 1-2 steep faces to make wheel positioning easier, plus some kind of feature or protrusion on the top of a rock to hook the wheel onto. Curiosity has already passed rocks that could be used for wheel shedding, but it’s also possible that the rover may end up following its science mission into geologic areas where it won’t be able to find the rock that it needs, and if so, well, that’s just how it goes.
 A comparison between the wheels of the Curiosity and Perseverance rovers.Image: NASA/JPL-Caltech
A comparison between the wheels of the Curiosity and Perseverance rovers.Image: NASA/JPL-Caltech
Meanwhile, over in Jezero Crater, Perseverance is just starting its own Martian journey, and as you’d expect, JPL took everything that they learned from observing Curiosity’s wheel wear and used it to develop more rugged wheels for Perseverance.
“The design of Perseverance’s wheels was informed by the damage to Curiosity wheels, and the new wheels have numerous features that make them tougher,” explains Graser. “More grousers with less spacing between them, a new tread design without chevrons, and a thicker skin all contribute. The Mars 2020 team conducted extensive testing of the new wheels and found that they both perform better and have greatly improved damage tolerance compared to Curiosity’s.”
 This Curiosity “selfie,” taken at a location called Mont Mercou, was captured on March 26, 2021, the 3,070th Martian day of the rover’s mission.Image: NASA/JPL-Caltech/MSSS
This Curiosity “selfie,” taken at a location called Mont Mercou, was captured on March 26, 2021, the 3,070th Martian day of the rover’s mission.Image: NASA/JPL-Caltech/MSSS
I’m very much hoping that Curiosity gets to the point where JPL might have to start looking at wheel shedding again, if for no other reason than it will have meant that the rover has been hard at work for at least an additional decade. But until that milestone of 14 broken trousers is reached (in 2034 or thereabouts), the MSL Wheel Wear team is on pause, and it sounds like they don’t really think that this will ever be a problem they’ll come back to because wheel wear won’t be the thing that limits Curiosity’s lifetime.
Curiosity has spent more than 3000 days on Mars, far longer than its primary mission life of two years. It’s probably unrealistic to expect that Curiosity will match Opportunity, which exceeded its 90-day primary mission life by a mind-blowing factor of 57. According to the Wheel Wear Team, current wheel damage rates and a steadily decreasing effective driving rate due to the way Curiosity’s radioisotope thermoelectric generator works implies that “no wheel will reach a state of heavy damage during the predicted lifetime of the rover.”
Even if the shed maneuver is never used on Mars, I love the fact that this is the solution that the folks JPL conceptualized, developed, and then tested because it seems so completely in the tradition of spectacularly crazy ideas that include things like giant clusters of bouncy airbags and rocket-powered skycranes—stuff where you hear about it, think they can’t possibly be serious, and then gradually realize that it is in fact the best solution to the problem. And if JPL keeps coming up with creative solutions like these to keep Curiosity alive and well (or at least, well enough), maybe 2034 won’t seem quite so far away.
Rimmed Wheel Performance on the Mars Science Laboratory Scarecrow Rover, by Evan Graser, Sean McGill, Arturo Rankin, and Alex Bielawiec from JPL was presented at the 2020 IEEE Aerospace Conference, and you can read it here.
This article appears in the July 2021 print issue as “JPL’s Backup Plan for Worn Rover Wheels.”


