
It’s hard to beat the energy density of chemical fuels. Batteries are quiet and clean and easy to integrate with electrically powered robots, but they’re 20 to 50 times less energy dense than a chemical fuel like methanol or butane. This is fine for most robots that can afford to just carry around a whole bunch of batteries, but as you start looking at robots that are insect-size or smaller, batteries simply don’t scale down very well. And it’s not just the batteries—electric actuators don’t scale down well either, especially if you’re looking for something that can generate a lot of power.
In a paper published 14 September in the journal Science, researchers from Cornell have tackled the small-scale actuation problem with what is essentially a very tiny, very soft internal-combustion engine. Methane vapor and oxygen are injected into a soft combustion chamber, where an itty-bitty li’l spark ignites the mixture. In half a millisecond, the top of the chamber balloons upward like a piston, generating forces of 9.5 newtons through a cycle that can repeat 100 times every second. Put two of these actuators together (driving two legs a piece) and you’ve got an exceptionally powerful soft quadruped robot.
Each of the two actuators powering this robot weighs just 325 milligrams and is about a quarter of the size of a U.S. penny. Part of the reason that they can be so small is that most of the associated components are off-board, including the fuel itself, the system that mixes and delivers the fuel, and the electrical source for the spark generator. But even without all of that stuff, the actuator has a bunch going on that enables it to operate continuously at high cycle frequencies without melting.
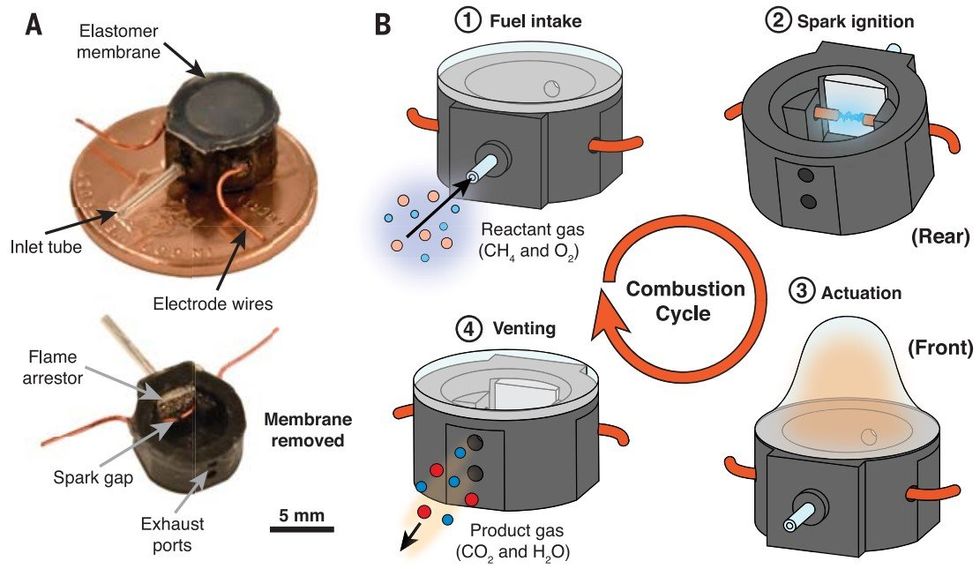 A view of the actuator and its component materials along with a diagram of the combustion actuation cycle.Science Robotics
A view of the actuator and its component materials along with a diagram of the combustion actuation cycle.Science Robotics
The biggest issue may be that this actuator has to handle actual explosions, meaning that careful design is required to make sure that it doesn’t torch itself every time it goes off. The small combustion volume helps with this, as does the flame-resistant elastomer material and the integrated flame arrestor. Despite the violence inherent to how this actuator works, it’s actually very durable, and the researchers estimate that it can operate continuously for more than 750,000 cycles (8.5 hours at 50 hertz) without any drop in performance.
“What is interesting is just how powerful small-scale combustion is,” says Robert F. Shepherd, who runs the Organic Robotics Lab at Cornell. We covered some of Shepherd’s work on combustion-powered robots nearly a decade ago, with this weird pink jumping thing at IROS 2014. But going small has both challenges and benefits, Shepherd tells us. “We operate in the lower limit of what volumes of gases are combustible. It’s an interesting place for science, and the engineering outcomes are also useful.”
The first of those engineering outcomes is a little insect-scale quadrupedal robot that utilizes two of these soft combustion actuators to power a pair of legs each. The robot is 29 millimeters long and weighs just 1.6 grams, but it can jump a staggering 59 centimeters straight up and walk while carrying 22 times its own weight. For an insect-scale robot, Shepherd says, this is “near insect level performance, jumping extremely high, very quickly, and carrying large loads.”
It’s a little bit hard to see how the quadruped actually walks, since the actuators move so fast. Each actuator controls one side of the robot, with one combustion chamber connected to chambers at each foot with elastomer membranes. An advantage of this actuation system is that since the power source is gas pressure, you can implement that pressure somewhere besides the combustion chamber itself. Firing both actuators together moves the robot forward, while firing one side or the other can rotate the robot, providing some directional control.
“It took a lot of care, iterations, and intelligence to come up with this steerable, insect-scale robot,” Shepherd told us. “Does it have to have legs? No. It could be a speedy slug, or a flapping bee. The amplitudes and frequencies possible with this system allow for all of these possibilities. In fact, the real issue we have is making things move slowly.”
Getting these actuators to slow down a bit is one of the things that the researchers are looking at next. By trading speed for force, the idea is to make robots that can walk as well as run and jump. And of course finding a way to untether these systems is a natural next step. Some of the other stuff that they’re thinking about is pretty wild, as Shepherd tells us: “One idea we want to explore in the future is using aggregates of these small and powerful actuators as large, variable recruitment musculature in large robots. Putting thousands of these actuators in bundles over a rigid endoskeleton could allow for dexterous and fast land-based hybrid robots.” Personally, I’m having trouble even picturing a robot like that, but that’s what’s exciting about it, right? A large robot with muscles powered by thousands of tiny explosions—wow.
Powerful, soft combustion actuators for insect-scale robots, by Cameron A. Aubin, Ronald H. Heisser, Ofek Peretz, Julia Timko, Jacqueline Lo, E. Farrell Helbling, Sadaf Sobhani, Amir D. Gat, and Robert F. Shepherd from Cornell, is published in Science.


