![Agility Robotics designed its legged robots Cassie [left] and Digit to move in a more dynamic fashion than regular robots do.](https://spectrum.ieee.org/media-library/agility-robotics-designed-its-legged-robots-cassie-left-and-digit-to-move-in-a-more-dynamic-fashion-than-regular-robots-do.jpg?id=25587819&width=3600&height=2700)
 Gif: Dan Saelinger
Gif: Dan Saelinger
Robots have walked on legs for decades. Today’s most advanced humanoid robots can tramp along flat and inclined surfaces, climb up and down stairs, and slog through rough terrain. Some can even jump. But despite the progress, legged robots still can’t begin to match the agility, efficiency, and robustness of humans and animals.
Existing walking robots hog power and spend too much time in the shop. All too often, they fail, they fall, and they break. For the robotic helpers we’ve long dreamed of to become a reality, these machines will have to learn to walk as we do.
We must build robots with legs because our world is designed for legs. We step through narrow spaces, we navigate around obstacles, we go up and down steps. Robots on wheels or tracks can’t easily move around the spaces we’ve optimized for our own bodies.
Indeed, many humanoids feature legs that look similar to ours, with hips, knees, ankles, and feet. But the similarities usually end there: If you compare, for example, the forces these robots exert on the ground with those a human exerts, you’ll discover that they are often quite different. Most humanoids, descended from early industrial robot arms, control their limbs to follow specified trajectories as accurately and rigidly as possible. However, legged locomotion does not require position control so much as force control, with plenty of pliability and elasticity—known in robotics as compliance—to allow for unexpected contacts.
A number of research groups have been trying to build robots that are less stiff and that can move in a more dynamic, humanlike fashion. The most famous such robot is perhaps Atlas, from Boston Dynamics, a humanoid that can run on hard and soft terrain, leap over logs, and even do backflips. But again, when we compare the motion of even the most sophisticated robots with what animals can achieve, the machines fall short.
What are we missing? Technology isn’t the biggest hurdle: Motors are powerful enough, materials are strong enough, and computers are fast enough. Rather, the limiting factor appears to be our basic understanding of how legged locomotion works.
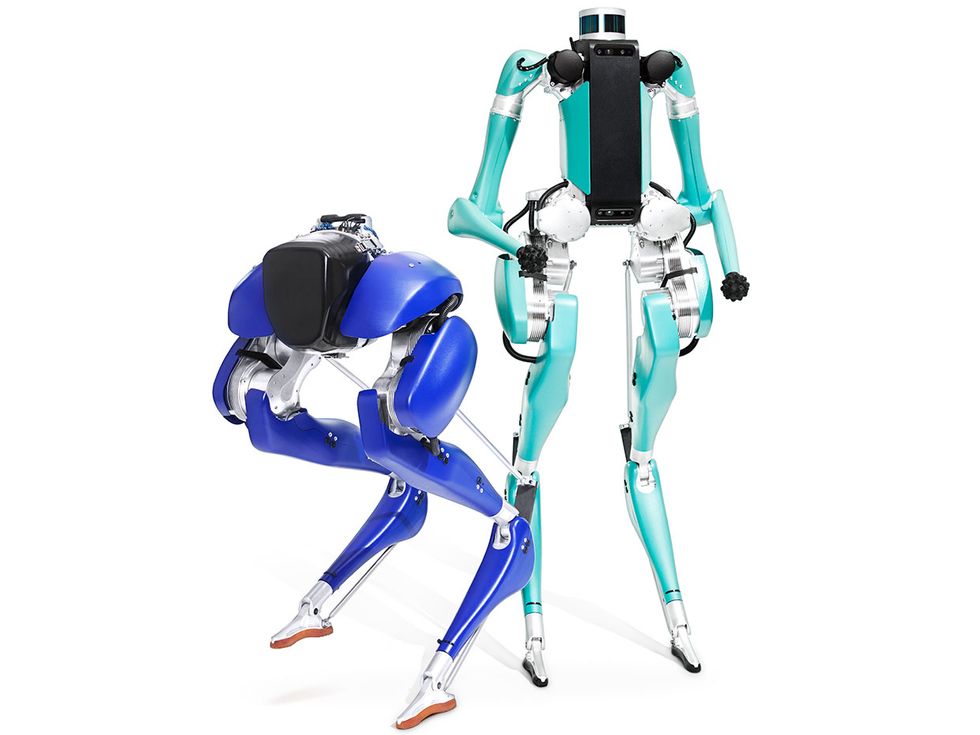 Real-Life Droids: Agility Robotics designed its legged robots Cassie (left) and Digit to move in a more dynamic fashion than regular robots do.Photos: Dan Saelinger
Real-Life Droids: Agility Robotics designed its legged robots Cassie (left) and Digit to move in a more dynamic fashion than regular robots do.Photos: Dan Saelinger
At Oregon State University’s Dynamic Robotics Laboratory, I lead a group of researchers seeking to identify the underlying principles of legged locomotion and to apply our discoveries to robots. I’m also the cofounder and chief technology officer of Agility Robotics, a startup based in Albany, Ore., that’s exploring commercial uses for robotic legged mobility. In 2017, we unveiled Cassie, a bipedal platform we have sold to several research groups. Soon we will have a new robot ready to step out into the world: Digit has legs similar to Cassie’s, but it also features perception sensors and a pair of arms, which it will use for stability and, in the future, manipulation.
Through both the lab and the company, we’re working toward a future in which robots will be able to go anywhere people go. I believe dynamic-legged robots will one day help take care of elderly and infirm people in their homes, assist with lifesaving efforts in fires and earthquakes, and deliver packages to our front doors. Robotic legs will also enable exoskeletons and powered prosthetic limbs to give people with disabilities more mobility. They’ll finally bring the robots imagined in science fiction into our daily lives.
Some birds run better than they can fly, if they can fly at all. Ostriches, turkeys, guinea fowl, and quail can’t soar like a hawk, but they are fast on their feet. In collaboration with Monica Daley from the University of London’s Royal Veterinary College, my colleagues and I have spent countless hours observing birds walking and running in the laboratory. We want to understand how these animals move so nimbly and efficiently—most of these feathered machines are powered only by seeds!
In one experiment, a guinea fowl is running down a track when it steps on a pit concealed by a sheet of tissue paper. The bird didn’t know it was going to step into a pothole about half a leg deep; yet the animal doesn’t miss a beat, its leg stretching to adjust to the drop as it darts past the obstacle. What’s happening here is pretty remarkable: The bird’s brain doesn’t have to sense and react to the disturbance because its legs can handle it on their own.
This offers an important insight for robot designers: If you first build your robot and only then try to program it to be agile, you’re likely doomed to fail. As with the guinea fowl, a robot’s agility will derive in great part from inherent mechanical properties of its body, or what roboticists call passive dynamics. And it’s been neglected in most legged-robot projects. By thoughtfully engineering the passive dynamics of your robot in parallel with software control as an integrated system, you increase your chances of making a robot that approaches the performance of an animal.
Now, it’s worth pointing out that although animals serve as our inspiration, we don’t replicate the shape of a bird’s foot or the arrangement of muscles and bones in a human leg. Instead, we want to capture the physics of animal locomotion and abstract from it a mathematical model that we can understand, test in computer simulations, and then implement in real robots. Because we are using metal and electronics rather than bones and brains to build these robots, they may look quite different from an animal while still capturing the same physics.
One of the simplest mathematical models consists of a point mass (representing the upper body) attached to a pair of ideal springs, which represent the legs. This model, known as a spring-mass model, is a simplification, of course; it resembles a stick figure and doesn’t take into account that legs have joints, or that the feet don’t touch the ground at discrete points. Still, the spring-mass model can produce surprising results: In simulations, it can generate nearly every walking and running gait observed in people and animals.
 First Steps: ATRIAS’s legs don’t look like a person’s, but the robot was the first machine to demonstrate humanlike walking-gait dynamics.Photo: Oregon State University
First Steps: ATRIAS’s legs don’t look like a person’s, but the robot was the first machine to demonstrate humanlike walking-gait dynamics.Photo: Oregon State University
To test the spring-mass model in a machine, my group at Oregon State—in collaboration with Hartmut Geyer from Carnegie Mellon University and Jessy Grizzle from the University of Michigan—developed ATRIAS, a bipedal robot whose name is an acronym reflecting our main premise: Assume The Robot Is A Sphere. The idea was that the passive dynamics of the robot could come as close as possible to reproducing those of the point mass with springy legs.
We built each leg out of lightweight carbon-fiber rods, arranged in a parallelogram-shaped structure known as a four-bar linkage. This structure [PDF] minimized the mass of the legs and their associated inertia, approximating the spring-mass model. We also equipped the upper portion of the legs with fiberglass springs, which physically embody the “spring” part of the model, handling ground impacts and storing mechanical energy.
At first, ATRIAS could barely stand, and we supported it with an overhead tether. But as we refined its controller, which kept track of the body’s speed and tilt, the robot took its first steps and soon was pacing through the lab. Next ATRIAS learned to recover from disturbances, which in one experiment consisted of my students throwing dodgeballs at it. We also took ATRIAS to the university’s football field, accelerated the robot to a top speed of 7.6 kilometers per hour (4.7 miles per hour), and then quickly brought it to a stop—in the end zone, of course.
To understand better what the robot was doing, imagine you’re blindfolded and wearing stilts, with your upper body wrapped up in a carpet, so you can’t use your arms for balancing. All you can do is keep stepping, and that’s what ATRIAS did. It was even able to handle obstacles, such as a pile of plywood placed on its path.
While agility was important, it was also critical that ATRIAS economize on power. We confirmed it did when we measured a parameter known as cost of transport (COT). It’s defined as the ratio of power consumption to weight times velocity, and it’s used to compare the energy efficiency of how animals and machines move. The lower the COT, the better. A person walking, for example, has a COT of 0.2, while conventional humanoid robots have much higher values—ranging between 2 and 3, according to some estimates [PDF]. Our experiments showed that ATRIAS, in walking mode, had a COT of 1.13 [PDF], demonstrating the efficiency benefits of dynamic robots [PDF]. Indeed, a few small lithium-polymer batteries—the type used in radio-controlled cars—could keep ATRIAS operating for about an hour.
We also measured the forces [PDF] the robot was exerting on the ground. We placed ATRIAS, which weighs in at 72.5 kilograms, or about the same as a person, on a force plate, an instrument often used in sports medicine to assess a person’s gait by gauging ground-reaction forces. While the robot walked, we recorded the force data. Then we replaced ATRIAS with one of my students, and recorded his steps. When we plotted the ground-reaction forces over time, the two data sets had the exact same shape. As far as we know, it is the most realistic robotic implementation of human gait dynamics that has ever been done.
The results confirmed that a simple actuated spring-mass system is something that can be built into a robot; enable many of the traits we seek such as efficiency, robustness, and agility; and get at the core of what legged locomotion is. It was time to build our next robot.
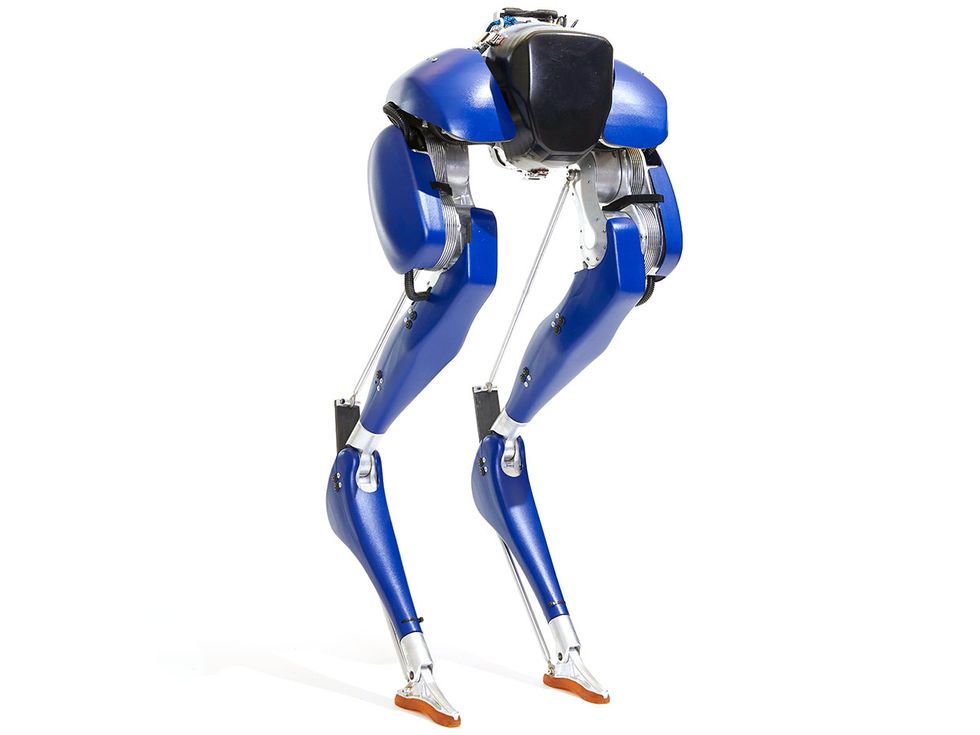 Dynamic Walker: To move nimbly through complex terrain, Cassie uses five motors and two springs on each leg.Photo: Dan Saelinger
Dynamic Walker: To move nimbly through complex terrain, Cassie uses five motors and two springs on each leg.Photo: Dan Saelinger
Cassie is a dynamic walker like ATRIAS. We optimized every aspect of its design with the goal of building a rugged and capable robot that Agility Robotics could commercialize. And we set a high bar: We wanted Cassie to be able to run through a forest, handling rough terrain and operating for hours on a battery, without a safety tether.
Cassie builds on the same concepts developed for ATRIAS, but we decided to give it brand-new legs. We’d used two motors to power the four-bar linkage on each leg of ATRIAS. This arrangement minimized their mass, but there was a trade-off: During part of the step cycle, one motor acted as a brake on the other, costing significant energy unnecessarily. For Cassie, we studied alternative leg configurations [PDF] to eliminate this effect. The new design allows the motors to be smaller, and thus makes the robot even more efficient than ATRIAS was.
It’s important to note that Cassie’s leg configuration was a result of this analysis. The fact that the leg resembles that of an ostrich or other theropod may be a sign that we are on the right track, but it was never our goal to create a robot that, with a few well-placed feathers, could fit right in with a mob of emus.
Each of Cassie’s legs has five axes of motion—or degrees of freedom in robotic parlance—each one driven by a motor. The hips have three degrees of freedom, similar to our own, allowing the leg to swing in any direction. Two other motors power joints in the knee and foot. Cassie has additional degrees of freedom in its shin and ankle; these are passive, not controlled by motors but rather attached to springs, which help the robot move through complex terrain that flat-footed humanoids can’t handle.
Cassie’s new legs required a more sophisticated low-level controller than ATRIAS did. With ATRIAS, extending a leg was achieved simply by applying equal and opposite torques with the two motors. With Cassie’s leg, moving the foot in a specific direction requires calculating different torques for each motor. To do that, the controller needs to take into account the inertia of the legs as well as the dynamics of the motors and gearboxes.
 Step By Step: Cassie’s controller uses planned footstep placements and dynamic balancing to allow the robot to climb stairs.Gif: Dan Saelinger
Step By Step: Cassie’s controller uses planned footstep placements and dynamic balancing to allow the robot to climb stairs.Gif: Dan Saelinger
True, the control problem became more complex, but this method allows for better performance and a much broader range of behaviors. Cassie can achieve a walking speed of 5 km/h using one of our initial controllers. The power draw ranges from 100 watts (standing) to about 300 W (walking), and the lithium-ion battery allows for about 5 hours of continuous operation. The new legs also allow Cassie to steer in a way that ATRIAS couldn’t. And thanks to a powered foot joint, it can stand in place without having to constantly move its feet the way ATRIAS does.
Cassie also weighs just 31 kg (68 pounds), half as much as ATRIAS. You can load two Cassies into the trunk of a car in less than a minute. And it’s far more robust: Its body parts are made of aluminum and carbon fiber, and a protective shell made of thermoformed acrylic-polyvinyl chloride, a strong plastic, protects it from collisions and falls.
Cassie isn’t running through forests just yet. But we’ve taken it outdoors, without safety tethers, and it has walked on dirt, grass, and leaf-strewn paths. We’re now learning how to integrate the robot’s dynamic behaviors with motion planning [PDF], which allows it to climb stairs, for example. We’re also working on another feature that could make a robot like Cassie much more useful: arms.
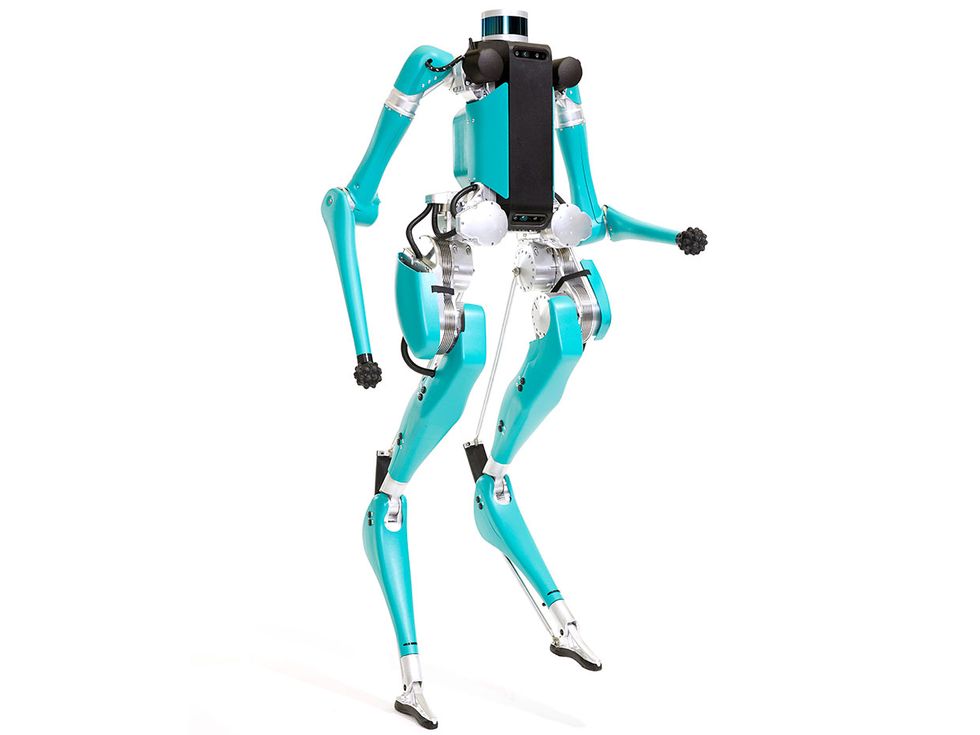 Brand-New Body: Digit has legs similar to Cassie's, but it also has a torso packed with sensors and a pair of arms designed to help with mobility and balance.Photo: Dan Saelinger
Brand-New Body: Digit has legs similar to Cassie's, but it also has a torso packed with sensors and a pair of arms designed to help with mobility and balance.Photo: Dan Saelinger
Digit is a direct descendant of Cassie. It has similar legs, but we added a torso and a pair of arms. The arms are designed to help with the robot’s mobility and balance, as they swing in coordination with the gait. They’ll also allow Digit to catch itself when it falls, and reorient its body to get back up.
There’s something else that Digit has that Cassie didn’t: integrated perception. We added numerous sensors to the robot, including a lidar atop the torso. These sensors will help gather data to allow the robot to navigate a world full of obstacles such as cluttered rooms and stairs, and to rely on the underlying stable dynamics only when handling unexpected situations and sensing errors.
Digit and the legged robots that will follow still have a long way to go. But we’re convinced they will change the world. Their impact could be as big as the automobile in terms of changes to lifestyles, and even traffic patterns and aspects of city layouts, where these robots promise to transform logistics and package delivery.
In the not-too-distant future, as vehicles gain autonomy, carmakers and ride-sharing companies like Lyft and Uber will own large fleets of vehicles that transport people, with peak traffic during rush hour, just like today. But late at night and in the middle of the day, what will these automated vehicles do? Instead of simply being idle, they could transport your packages from automated warehouses to your home. However, these delivery vehicles are stuck at the curb: Without a human, getting the package to your doorstep is a major challenge. That’s where legged robots come in. Riding along in these vehicles, they’ll cover those last few meters. Although wheels and wings may serve some of these roles, in a world designed for bipeds, no mobility platform could be as versatile as a legged robot.
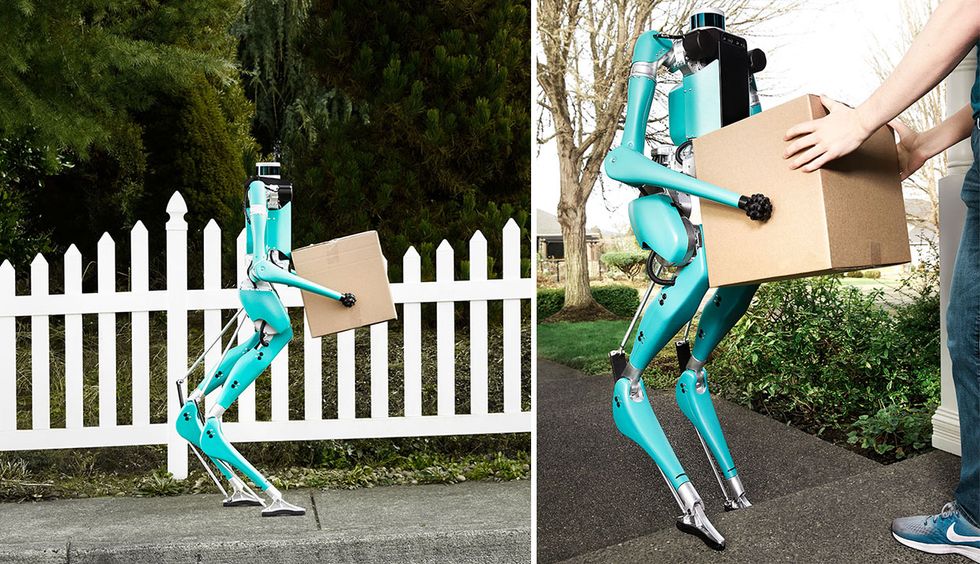 Special Delivery: Digit is learning to walk on different types of terrain and also climb stairs, so it may one day deliver packages directly to your front door.Photos: Dan Saelinger
Special Delivery: Digit is learning to walk on different types of terrain and also climb stairs, so it may one day deliver packages directly to your front door.Photos: Dan Saelinger
Delivery robots will be part of an increasingly more automated logistics system that goes from manufacturers and resellers directly to your door. This system will reduce shipping costs until it’s significantly less expensive to have items delivered to your home than to buy them from a large, well-lit, heated, human-accessible warehouse. Big-box stores that today sell what are essentially commodities will become superfluous. People will still enjoy in-store shopping for certain goods, of course. But for the week’s groceries, delivery robots will save you time and money.
Legged locomotion will also help bring robots into our homes and businesses. Robots that can navigate stairs and cluttered environments, while interacting safely with humans at eye level and at human scale, will allow us to age gracefully in our own homes. They’ll help carry things around and serve as telepresence devices, allowing family members and friends to use the robot to talk to people remotely and keep them company.
Legged robots will also go where it’s dangerous for humans to go. They will parachute into forest fires to gather data in real time, rush into burning buildings to check for occupants, or enter disaster zones, like the Fukushima Daiichi nuclear power plant, to explore hard-to-access areas. They will conduct regular inspections of the internal spaces of hydroelectric dams and explore abandoned mines, so that we won’t have to.
A lot of challenges need to be solved to get us to that future. But I’m convinced the robotics community can make this technology practical. It’ll be one small step for a robot, one giant leap for mankind.
This article appears in the March 2019 print issue as “Walk This Way.”
About the Author
Jonathan Hurst is chief technology officer and co-founder of Agility Robotics, as well as an associate professor of robotics and College of Engineering Dean's Professor at Oregon State University. He holds a B.S. in mechanical engineering and an M.S. and Ph.D. in robotics, all from Carnegie Mellon University. His university research focuses on understanding the fundamental science and engineering best practices for legged locomotion. Agility Robotics is using this research to develop commercial applications for robotic legged mobility.