It’s always cool to see lionfish while snorkeling or scuba diving. They’re spectacular-looking, and because they’re covered in flamboyant spines, they’re usually secure enough in their invincibility that they’ll mostly just sit there and let you get close to them. Lionfish don’t make for very good oceanic neighbors, though, and in places where they’re an invasive species and have few native predators (like most of the Atlantic coast of the United States), they do their best to eat anything that moves while breeding almost continuously. From a 2010 Oregon State study on a reef in the Bahamas:
A single lionfish per reef reduced young juvenile fish populations by 79 percent in only a five-week period. Many species were affected, including cardinalfish, parrotfish, damselfish, and others. One large lionfish was observed consuming 20 small fish in a 30-minute period.
As horrible as this is, lionfish have the right idea about successfully controlling fish populations—if you want fewer of something, eat it. Lionfish fillets are tasty, and there have been concerted efforts to raise demand for the meat for conservation purposes. The hope is that a robust consumer market will incentivize lionfish hunting, and that humans with spearguns will become the predators that invasive lionfish need.
The trouble with this is where many lionfish hang out and breed, which is too deep for most recreational divers. This is where Robots in Service of the Environment (RSE) comes in. Founded by Colin Angle of iRobot, RSE has been developing remote controlled underwater robots that can efficiently hunt, stun, and capture lionfish at depths of 400 feet for up to 60 minutes at a time, and today they’re introducing their third-generation robot.

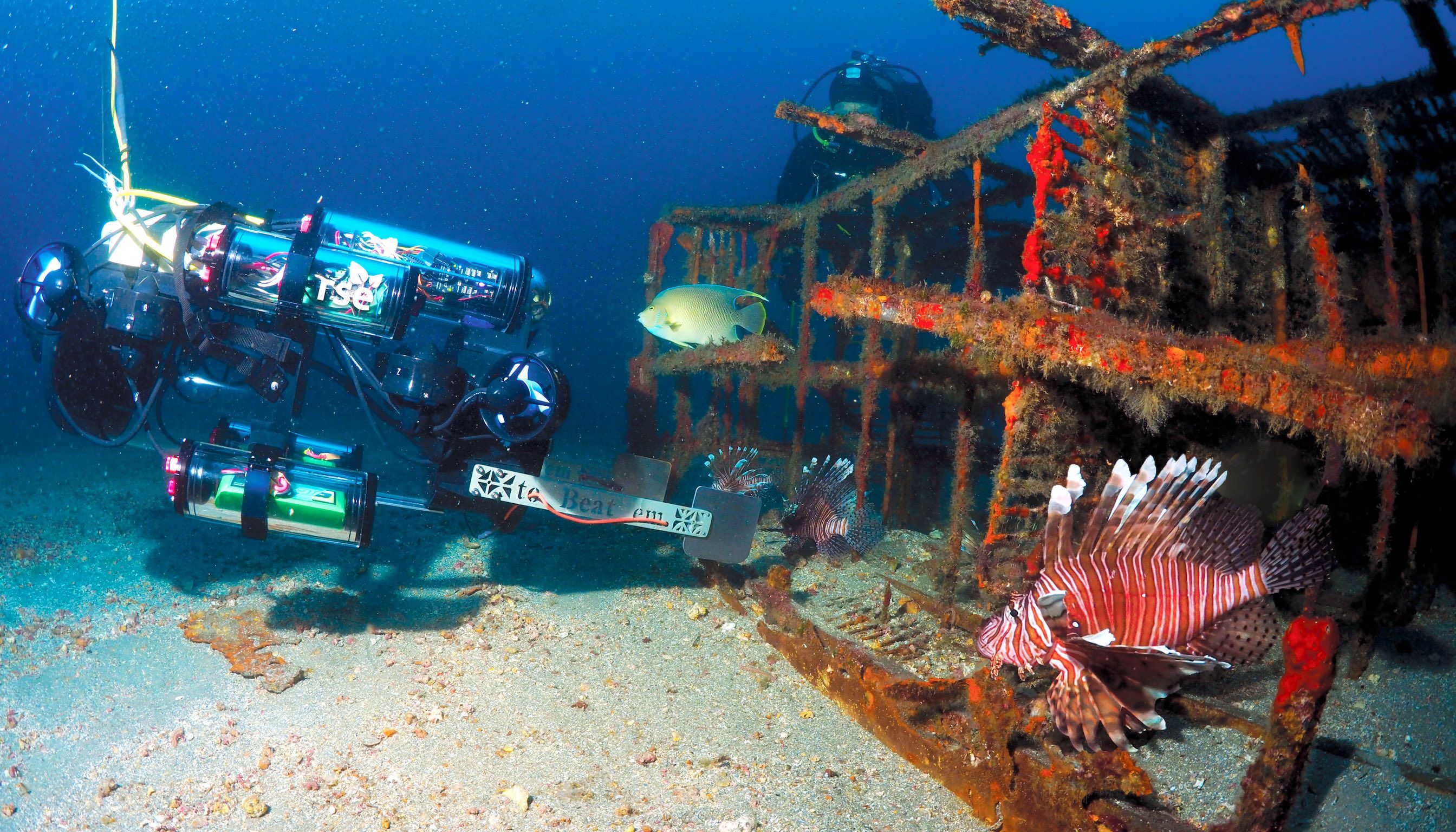
The RSE Guardian LF1 Mark 3 prototype is a modular unmanned underwater vehicles (UUV) designed specifically for lionfish hunting. Two paddles at the front of the robot can zap any lionfish that swims between them, stunning it instantly. The incapacitated fish is then sucked into the body of the robot, and up to 10 fish can be captured before the robot needs to return to the surface. The battery, sensing, propulsion, and nearly everything else is contained in modules bolted to the chassis of the robot, making repairs and upgrades simple. Control is fully manual at the moment, and dependent on a tether to the surface, although RSE is exploring how assistive autonomy can make piloting easier.
For more, we spoke with Adam Cantor, RSE’s director of engineering, via email.
IEEE Spectrum: You say “in order to truly impact the lionfish population there will need to be a lot of robots in the water hunting and capturing the fish wherever they are.” What does “truly impact” mean, and what does “a lot of robots” mean?
Adam Cantor: Our robots are capable of hunting the lionfish at their critical action depth (where they feed/breed.) Theoretically, no lionfish would be safe from the Guardian ROV, and over time the lionfish could be beaten back from shallow waters, down to depths where it is too cold and too dark for them to hunt and breed effectively. Even if not eradicated outright, this would slow their spread enough for them to be assimilated into existing food chains.
When we say, “a lot of robots” we mean that anyone with a vested interest in protecting an ecosystem—dive charters, fishermen, conservationists, etc.—has access to easy-to-use, capable, and effective hardware with which they can impact the large scale spread of lionfish from invading their local reefs and sanctuaries. It doesn’t take daily missions to keep a reef clear if you can stun and capture lionfish at their critical action depth. A single robot could be run every day at different sites, bringing in tons of lionfish for sale, and protecting square miles of reef. The east coast of the united states is 2,000 miles long. To make an impact we need thousands of robots in operation, not millions, and we think that is a reachable goal.
Your website suggests that for your business model to be successful, several things must become true, including consistent demand for lionfish meat and fishermen willing to purchase and operate robots to fulfill this demand. Over the past several years, have you seen increasing demand for lionfish meat? And have fishermen expressed an interest in buying and operating robots? If so, what has this demand been like, and if not, what gives you confidence that these things will happen?
Our confidence in the lionfish market comes from two places: First, there was a decline in the number of lionfish sightings last year due to a temporary disease (no one is quite sure what caused it, but we have already heard they are back) and during that time the supply dried up, prices rose and we heard from seafood wholesalers that restaurants were even buying fish right off the docks to secure their menus.
Secondly, everywhere we travel, locals, visitors, government officials, and professionals all hear about the issue and want to help. Requesting and buying the fish at the market is one of the easiest things that anyone can do to make a real difference in the environment, and people seem hungry to rise to this particular challenge. We have also spoken with fishermen, spearmen, and trappers and their questions boil down to economics. Can they make their living catching lionfish with our robots? And we wouldn’t be working so hard on this project, if we weren’t 100 percent confident that it was possible.
More generally, why do you think that fishermen would be willing to purchase a robot, and then spend what looks to be a substantial amount of time catching relatively small numbers of lionfish one by one?
For a quick example let us assume the best case scenario for a lionfish spearman. A professional spearman can go to the start of lionfish breeding depth at 200 feet, and can stay down there for 10 minutes. They can make three to five dives in a day before they need to start worrying about serious diving risks. We know that the record setting pros can catch a fish in 10 seconds or so, so assume 60 fish in 10 minutes, five times, for a total of 300 fish for one diver in one day. The diver spent at least 6 hours to make those dives not counting travel time, equipment management and more, and again we are assuming world record pace here.
Our team can successfully catch one lionfish per minute. The robot can hold at least 10 average size fish, and the ROV can travel 100 feet per minute, up to a depth of 400 feet. So now I am going to spend 2 minutes to reach the same depth as my diver, spend 10 minutes to catch 10 fish, and then drive back up for 2 minutes to dump the fish and swap batteries if necessary (which also takes less than a minute). So assume conservatively that I am now catching 10 fish in 15 minutes. The robot needs no rest, each battery lasts over an hour of hunting time so it is easy to contain all of the batteries on board for the entire day. This brings us to 40 fish per hour, or 320 fish in an 8-hour day. Assuming there are fish left down there, the robot has lights and can run indefinitely so long as batteries can be recharged or we have enough of them. Our robot driver has had no risk to themselves, the fish all come up alive and fresh, ready for sale. On top of that there is no reason not to have two drivers and two robots off the same boat to double the catch rate.
Colin Angle mentioned that “with advances in wireless technology, we can actually have an app where people pay to go hunt lionfish and capture the fish by remotely operating the robot.” Is that (or some other method of dispersing the human labor required to operate the robots) still something you’re considering?
There are many methods of crowdsourcing the mission that we are considering. One that I find of particular interest is an autonomous hunting robot that asks for human confirmation on an image of the target lionfish before a capture is made. This would allow a much larger fleet of autonomous robots to be operated with oversight when it matters most. Colin’s suggestion is 100 percent viable, as the current control software can already run on any modern computer, tablet, or phone.
Lionfish spend much of their time in very close proximity to reefs. How will you make sure that the robots don’t cause damage to the reef while pursuing and capturing lionfish, especially with relatively inexperienced consumers controlling them?
The robot itself has its control scheme set so that when you are hunting a large control input still corresponds to a small motion. This takes out most of the risk of accidentally hitting anything at dangerous speeds. We are also already working through mechanical safety features for just this reason such as permeable foam coating on the paddles that won’t affect the stun and capture, but will stop any impacts from doing real damage. There is also always a human-in-the-loop to make sure controls and impacts are monitored appropriately.

Can you describe some of the engineering challenges that are unique to a robot with these capabilities?
Control latency is a huge challenge, the more complex the command or data signals, the longer it takes to transfer complete data. This can be frustrating for drivers dealing with currents, or wave motion. We have put a lot of thought and effort into what controls can be handled by the ROV on board, what data is useful to the driver, and what things just aren’t important enough to sacrifice update rate. Also safety is a massive challenge, we aren’t just careful of divers who might be in the water, but also every conceivable sea creature that may be curious or hidden out of sight, but within our stunning field. A huge amount of fine tuning was done to make sure that the lionfish could be stunned, but nothing larger, and that the field was non-lethal to even the smallest fish.
How much does the Mark 3 cost to construct? How much do you think it would cost to construct in volume?
The Mark 3 including batteries and communication tether costs ~$2500. At volume, we have an actionable and reasonable plan to sell the product version for ~$1000.
What improvements are you looking to make between the Mark 3 and the Mark 4?
We want to increase our depth limit to greater than 500 feet to actively engage in the lionfish’s critical action depth. The stun field can be optimized for lower power consumption, or greater effective range, and that is a balance we are working on. The Mark 4 will be the first platform to trial new autonomous behaviors, driver assistance, and more AI based features. There will be maneuverability improvements to assist in ease of use and hunting efficiency. There will be a method for reliably “packing in” the lionfish to increase storage capacity and fill rate. We will also be pursuing meaningful partnerships with manufacturers to reach cost targets, while improving our designs specifically for production and cost. The Mark 4 will also integrate the feedback that we have received from fishermen on user experience, ease of use, accessibility, and operational efficiency.
It sounds like there’s a lot of dependence here on people (like fishermen) being willing to hunt lionfish more because it’s important for the environment, rather than because it’s strictly the most profitable thing to do. And I’m not convinced that most people who make a living from catching fish are going to be willing to do that, especially since the more lionfish get caught, the less valuable they’re going to be. What seems more realistic to me is the model that Colin Angle touched on, of crowdsourcing the problem and encouraging people to do this for fun, or as a challenge, rather than as a means of making a living.
There are lots of challenges to this, however. As Adam mentions, communications and latency are big ones, since they make it more difficult to control the robot unless you’re physically attached to it with a tether, and you’re also trying to deal with fish that are moving in an ocean that is also moving. It seems like the RSE team is committed to making this work, though, and as a diver myself, I sincerely hope that they’re able to make an impact.
[ RSE ]