
It turns out that studying how to make robots grasp objects with their hands is helping researchers figure out how to make robots balance on their feet.
Christian Ott and his team at the German Aerospace Center's Institute of Robotics and Mechatronics have discovered a way to keep bipedal robots from falling over by using principles from robot grasping.
As shown in this video released at the 2011 IEEE-RAS International Conference on Humanoid Robots in Bled, Slovenia, the new approach allows the DLR Biped, a legged robot based on KUKA's lightweight system, to keep its feet firmly planted on the floor, even when kicked by a mean researcher or slammed with a 5-kilogram medicine ball. You try to do that!
It may appear that the robot is not doing much. But in reality, upon getting hit or pushed, it is rapidly adjusting the torque of its joints to counteract the disturbance -- and avoid falling on its face (well, it has no face, but you get the idea).
Imagine you are standing and someone starts pushing on your back. You react by putting more pressure on your forefeet. This nonrigid way of reacting to external forces and perturbations is called compliance, and is highly sought-after in cutting edge robotics -- it's better to absorb an impact than break or fall over.
That's exactly what the DLR Biped is doing. It's using a balancing controller to adjust its center of mass in a compliant way.

Today, most bipedal humanoid robots rely on a different balancing approach, known as Zero Moment Point (ZMP). It's been around since the mid-1980s and is used by many famous robots, such as ASIMO and WABIAN-2. With ZMP, robots rely on force sensors on their feet and a feedback control loop that constantly adjusts their position relative to this stable point (the ZMP) to keep balanced.
Ott's approach tackles the problem without needing the ZMP and foot sensors. Their technique "uses a formulation coming from the field of robot grasping, which considers at the same time a desired force and torque that allow the robot to recover the initial position and orientation [when disturbed]," the researchers write in "Posture and Balance Control for Biped Robots Based on Contact Force Optimization," which won the Best Paper award at the conference.
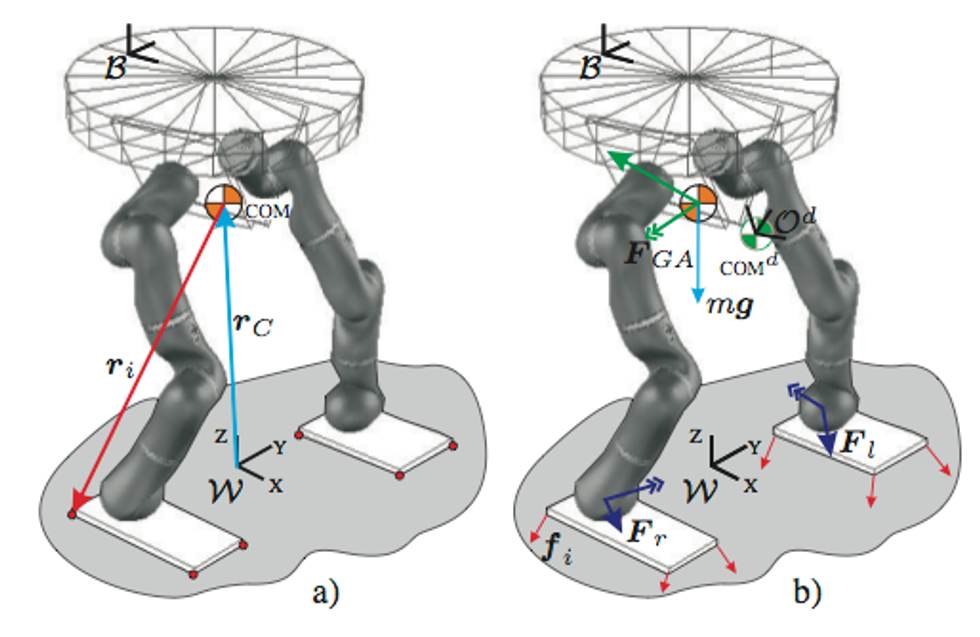
Their grasping-inspired controller elegantly takes into account friction at the contact points with the ground. First, it uses an optimization algorithm that computes the forces needed at each point to neutralize the perturbation. Then it determines how to move the robot's torque-controlled joints to produce the desired forces. The result: equilibrium.
The next obvious step would be to keep the stability while walking. The challenge is that the method currently uses a finite set of predetermined contact points, but the researchers are confident that they can extend it to a more general model. And they say it could be applied to one-legged and multi-legged robots as well.
Some researchers remain skeptical that bipedal robots will ever work (especially with the slew of face-planting robot videos), but advances like this will allow them to better integrate into our environment -- even if people try to push them over.
Angelica Lim is a graduate student at the Okuno and Ogata Speech Media Processing Group at Kyoto University, Japan.
Images and video: DLR
UPDATED: 7:57 p.m.


