 Video: See how the octo-bot crawls, grasps, and swims.
Video: See how the octo-bot crawls, grasps, and swims.The Conversation (0)

The author exhibits one of her octo-bot creations.
Photo: Jennie Hills/London Science Museum
 An octo-bot takes the plunge.Gif: The BioRobotics Institute/Scuola Superiore Sant’Anna
An octo-bot takes the plunge.Gif: The BioRobotics Institute/Scuola Superiore Sant’Anna
The sun was sparkling on the Mediterranean Sea on the afternoon when a graduate student from my lab tossed our prize robot into the water for the first time. I watched nervously as our electronic creation sank beneath the waves. But the bot didn’t falter: When we gave it the command to swim, it filled its expandable mantle with water, then jetted out the fluid to shoot forward. When we ordered it to crawl, it stiffened its eight floppy arms in sequence to push itself along the sandy bottom and over scattered rocks. And when we instructed it to explore a tight space beneath the dock, the robot inserted its soft body into the narrow gap without difficulty.
As a professor at the BioRobotics Institute at the Scuola Superiore Sant’Anna, in Pisa, Italy, I lead a team investigating soft robotics. This relatively new field of research has the potential to upend our ideas about what robots are capable of and where they can be useful. I chose to build robots that mimic the form of the octopus for two reasons. First, because they’re well suited to demonstrate the many advantages that come when a machine can flex and squish as needed. Also, it’s an excellent engineering challenge: An octopus with eight wiggly arms, which must work together in the face of complex hydrodynamic forces, is very difficult to design and control.
 Octo-bot arms can bend and grip.Gif: The BioRobotics Institute/Scuola Superiore Sant’Anna
Octo-bot arms can bend and grip.Gif: The BioRobotics Institute/Scuola Superiore Sant’Anna
In the course of our research, my team hoped to provoke a fundamental rethinking of robotic theories and techniques. We wanted to showcase materials that could be used in actuators that bend and stretch. More crucially, we sought to develop strategies for operating a robot that can curl its limbs in any direction, making it far more tricky to control than a rigid, articulated robot with limbs that have just a few degrees of freedom. To address these challenges, we drew inspiration from nature’s design of the remarkable flesh-and-blood octopus.
Up until recently, robots have mainly been used in factories, where their rigid arms are well suited for the repetitive tasks at hand and the accuracy required. Now, however, roboticists want to put their creations to work in more unpredictable settings where conventional robots often run into trouble.
Some researchers want to build flexible robots that can navigate irregular landscapes, like the ocean floor or the surface of Mars [pdf]. These robots must move over rough terrain without getting stuck and need manipulators that can grab whatever strangely shaped objects they encounter. Other researchers are focusing on soft robots that can be trusted not to hurt the people they come into contact with. Such soft robots could, for example, work as aides for the disabled or the elderly, and miniature soft robots could even serve as surgical tools inside the body.
In pursuit of these goals, robotics researchers are increasingly studying animals. That makes sense because the bodies of animals are composed mostly of soft materials, with pliable joints and tissue that can change shape without damage. Because their soft tissues absorb shocks and can conform to varied surfaces, animals can use simple control strategies that don’t demand great precision.
That, in a nutshell, is why I helped launch the Octopus Integrating Project. The effort brought together several labs from European and Israeli universities, which began working together in 2009 to build a robot replica of the fascinating animal. Some of the consortium members had worked on a previous effort that resulted in an “OctArm” attached to a tanklike robot, and they eagerly joined the new effort to copy the animal’s remarkable capabilities. We knew it wouldn’t be easy.
The octopus has neither an internal nor external skeleton, and its eight arms can bend at any point, elongate and shorten, and stiffen to apply force. It can twist its arms around objects and manipulate them with great dexterity, as demonstrated in plenty of entertaining YouTube videos, including one where the animal steals a camera from an underwater photographer and another where it releases itself from a jar by unscrewing the lid from the inside. An octopus needs such dexterity to survive in the wild. When it crawls along the seafloor, for example, its arms must coordinate their movements in a complex rippling sequence to push and pull its body forward.
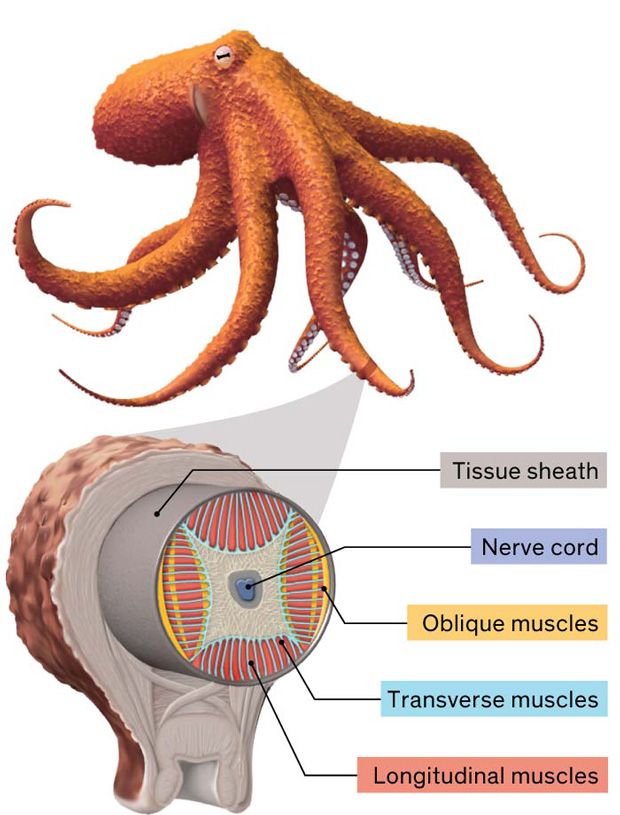
We wanted to build a robot that could replicate those agile motions. We started by studying the octopus arm’s muscular hydrostat structure, which allows the overall volume of the arm to remain constant while individual muscles contract and change shape. So when the diameter of an arm decreases, its length increases, and vice versa. To translate biology into engineering, we worked with marine biologists to take measurements of octopus arms and make computer models that could inform our designs. Then we began experimenting with soft actuators that could mimic the animal’s muscles.
One option was to make artificial muscles using materials known as electro-active polymers (EAPs). A layer of a soft material is sandwiched between two electrodes; when a voltage is applied, the EAP acts as a capacitor and the electrodes draw closer together, squeezing the soft material between them. Exploiting this phenomenon, researchers have created contractile units that can be arranged in stacks to generate significant forces. A research network in Europe is actively pursuing EAPs for artificial muscles.
Another possibility was to construct our robotic arms using fluidic actuators, in which liquids or gases fill soft chambers to change the shape of the larger structure. Clever design of the shapes and arrangement of the compartments allow a robotic arm to bend in the desired directions and may eventually enable more complicated movements.
Yet another interesting approach relies on filling a chamber with a granular material, such as sand or even ground coffee, instead of a fluid. With this technique, called jamming, the soft robot remains pliable until a vacuum is applied. Then the robot’s body stiffens into a hard shape—like a vacuum-packed brick of coffee on the grocery-store shelf. By applying vacuum to discrete sections in programmed sequences, researchers can make soft robots stiffen and move in specific ways.
 An octo-bot’s actuators mimic real octopus muscles.Gif: The BioRobotics Institute/Scuola Superiore Sant’Anna
An octo-bot’s actuators mimic real octopus muscles.Gif: The BioRobotics Institute/Scuola Superiore Sant’Anna
My team was most interested in creating artificial muscles using materials called shape-memory alloys (SMAs). When heated, SMAs deform to a predefined shape, which they “remember.” We fashioned SMA wires into springs and ran electric current through them to heat them, causing the springs to scrunch up in a way that imitates muscular contractions. For the Octopus project, my team constructed a prototype arm using SMA springs to stand in for the longitudinal and transverse muscles found in the limbs of a real octopus. By sending current through different sets of springs, we made the underwater arm bend at multiple points, shorten and elongate, even grasp things.
Our work is primarily meant to demonstrate the potential of soft robotics, and much work remains before a robot octopus will be ready to crawl out of the lab. For example, a bot with sensors on its limbs could provide feedback about its position and the materials it encounters, which could lead to better control strategies. A team of researchers at the Worcester Polytechnic Institute, in Massachusetts, is addressing just that challenge by embedding proprioceptive sensors in a robotic snake [pdf].
It’s fun to imagine how an advanced robot octopus with eight dexterous arms could perform in the wild. Take the marine-energy industry, where there’s great interest in placing tidal turbines on the seabed to harvest power from the flowing water. But if the machinery breaks, repairs would be difficult and expensive: Workers would have to either haul turbines up to the surface or send human divers down. Maybe, one day, an octo-bot technician could be sent instead. With its agile limbs, it could manipulate tools and fix whatever is broken.
We roboticists aren’t interested in the octopus for its limbs and muscles alone—we also value its particular brand of intelligence. The octopus’s brain and peripheral nervous system are well developed compared with those of other mollusks, but they’re still fairly limited. It’s surprising, then, that they can control a huge range of movements in eight independent arms. So our next challenge under the Octopus project was to study how the animal controls its arms. We hoped the results would help us find ways to manage a flexible robot’s complex movements.
Biologists have determined that the octopus’s brain doesn’t issue top-down commands for every small movement of its twisty limbs. In Octopus vulgaris, the common octopus, the brain actually contains far fewer neurons than the peripheral nervous system. Biologists believe that the brain initiates motions, while lower motor centers control the precise neuromuscular activity. Experiments have shown that even if you sever the nerves descending from an octopus’s brain, its arms can still recoil from unpleasant stimuli and reach out as if to grab something.
And here’s what we found even more interesting: The octopus’s limbs don’t need comprehensive directions to produce the desired movement. Thanks to millions of years of evolution, their bodies are designed to respond to their environment in certain automatic and useful ways. This concept is often called morphological computation [pdf] by roboticists, while artificial intelligence researchers refer to it as embodied intelligence.
When translated to the robot world [pdf], this principle means we should design our robots so that the physical properties of their bodies automatically produce the desired movements. With this strategy, extremely simple commands can cause a robot to efficiently carry out complex tasks.
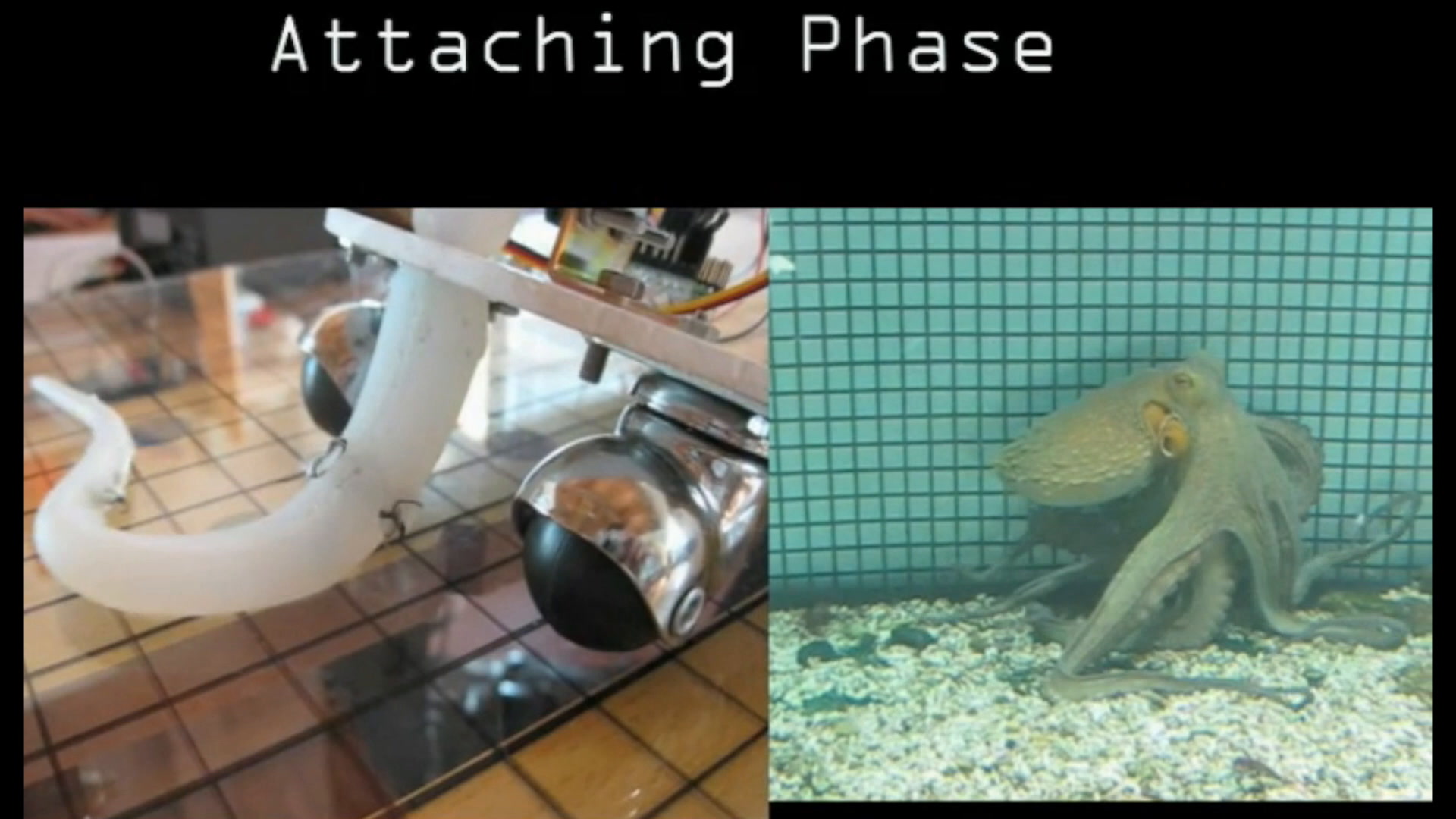
We kept this principle in mind when we first set out to make a robot octopus that could crawl along the seafloor [pdf]. We studied the locomotion strategy of the real animal, and determined that it uses a four-step procedure to crawl. First it attaches one of its rear limbs, which are covered in suckers, to the bottom. Then it elongates that limb to push the rest of its body forward. In the third stage it pulls up its suckers to detach the limb from the seafloor. And finally, it shortens the limb to bring it closer to its body and prepare for the next push. The animal ripples forward as two of its arms perform these actions in graceful sequence.

To mimic this form of locomotion, it might seem that our octo-bot would need to carry out a huge number of computations to control its eight arms, each of which can bend at any point. In a typical robot, each degree of freedom for a limb requires an actuator to drive movement in that direction and some sort of numerical controller to govern the actuator. But our robotic arms had too many degrees of freedom to apply the usual control strategy.
We decided to follow the example of evolution and try to fashion arms that didn’t require complex control inputs. Before we built anything, we formulated mathematical models to test various aspects of the arm’s design, including the density of the material used, its stiffness, its shape, the internal placement of its artificial muscles, and so on. All of these parameters needed to be examined in the context of how the arms would perform underwater. How would these arms fare in water of different salinities and temperatures? How would increased depth and pressure affect them? How would currents and turbulence influence their movement? To answer those questions, we added hydrodynamic factors to our models. We also had to consider the texture and composition of the surfaces over which they’d be crawling. We decided not to complicate our design by adding suckers to the arms, instead using a material for the exterior that would produce plenty of friction.
With all those parameters in the model, the task of finding the optimal combination became far too complex for anyone to compute by trial and error, so we used an evolutionary algorithm to explore the vast range of possibilities. This algorithm started by creating many hypothetical octopus body shapes, each with its own set of characteristics. Then it tested those octopuses’ arms to see which performed best in the models, and used the “fittest” limbs’ attributes to inspire a new batch of possibilities. In this way, we identified an arrangement that would generate the correct amount of propulsive force and produce the desired crawling movement.
The results were very gratifying: In particular, it proved simple to control the octo-bot, and we could mimic the four-step crawling we’d observed in the real animal. For this prototype, which was intended to showcase control mechanisms rather than materials, we swapped out the SMAs and instead used cables as artificial muscles. Each silicone-rubber arm contained a steel cable that lengthened or shortened the arm and a carbon fiber cable that bent the arm for the attachment and detachment steps (and also enabled the robot to grasp objects). One simple servomotor in each arm provided power.
An enormous number of sophisticated computations had been done at the time of the design. But when the robot was in action, we said proudly that it was very dumb: It had only a simple “brain,” or microcontroller, which triggered the arms in the correct sequence to make the octo-bot crawl by virtue of the mechanical properties of its body. Our octo-bot demonstrated morphological computation at work.
In 2012, my team at the BioRobotics Institute began a related project called PoseiDrone. For that venture, we decided to apply everything we’d learned to create a soft underwater robot that could not only crawl and grasp objects but also swim.
 We devised a jet-propulsion system for an octo-bot.Gif: The BioRobotics Institute/Scuola Superiore Sant’Anna
We devised a jet-propulsion system for an octo-bot.Gif: The BioRobotics Institute/Scuola Superiore Sant’Anna
To give this robot swimming abilities we once more relied on morphological computing. The key was the design of the octo-bot’s mantle—the headlike part of an octopus that swells up when it fills with water, then contracts to eject the water and generate jet propulsion. Again, we used computer models to determine the size, shape, and material properties of the silicone mantle, paying careful attention to the ways the structure would deform as it ejected the water. Our algorithm produced the optimal combination that would, with only one small motor and a few simple cables, send the octo-bot jetting through the water.
 An octo-bot wiggles through the water.Gif: The BioRobotics Institute/Scuola Superiore Sant’Anna
An octo-bot wiggles through the water.Gif: The BioRobotics Institute/Scuola Superiore Sant’Anna
With our PoseiDrone prototype, we studied its ability to perform various tasks, such as crawling while toting an object and propelling itself with a series of bursts while swimming. That prototype was the bot we tossed into the Mediterranean to see how it would fare in the great outdoors. We were proud to watch our robot deal handily with the unpredictable surfaces, waves, and currents it encountered, and at the conclusion of our experiments we found a suitable retirement for this exemplary specimen. The PoseiDrone robot will soon reside in a tank in the Livorno, Italy, aquarium—right next to a real octopus.
Video: See how the octo-bot crawls, grasps, and swims.
About the Author
Cecilia Laschi is a professor of biorobotics at the Scuola Superiore Sant’Anna in Pisa, Italy.
From Your Site Articles


