
During practices, American football coaches typically stay on the sidelines, grim-faced, as they order their players through drills. But during an afternoon this past May, in the cavernous training facility for the Pittsburgh Steelers, head coach Mike Tomlin couldn’t resist getting in on the action. As a human-size robot sped over the artificial turf, the grinning coach ran onto the field and tackled it.
The MVP, or Mobile Virtual Player, was designed to take precisely this kind of hit—the sort of jarring blow that, inflicted repeatedly, can injure the brains of human players. American football has been rocked by controversy over the last decade, as it has become clear that the repeated collisions inherent to the sport are giving players concussions and sometimes causing debilitating and permanent brain trauma. In response, the U.S. National Football League (NFL) has altered rules and contributed millions to medical research. Meanwhile, the same head-injury concerns have found even greater resonance in college and youth football. Doctors, politicians, and parents are asking an urgent question: If these smashing impacts begin when players are young, what will be the cumulative effect after many years?
In 2013, I was part of a team of undergraduate engineering students at Dartmouth College, in Hanover, N.H., that sought a technological solution to this problem. We wanted to invent a robotic tackling dummy that could move like a real player and take the hits during practice sessions. By serving as a realistic stand-in, we figured, a robot would reduce player-on-player impacts during tackling drills, when many head injuries occur. We aimed to build a zippy padded robot that could be knocked down by a powerful linebacker and immediately pop back up, ready for the next player’s charge.
aspect_ratio The MVP robot is designed to take hard tackles and pick itself back up again.Video: Mobile Virtual Player
The MVP robot is designed to take hard tackles and pick itself back up again.Video: Mobile Virtual Player
The path from a college lab to an NFL gym wasn’t smooth. But after years of hard work, I’m now director of R&D for a tech startup, also called MVP, that’s further developing the bot. We’ve partnered with a sports equipment company to manufacture commercial units, and our first batch rolled off the line in August. Over the past few months we distributed those robots to customers on our waiting list, which included NFL teams and some of the top college football teams in the country.
For that visit in May to the Steelers’ training facility we brought a beta version of the MVP. I’m proud to say that after a two-week tryout, it made the cut: The Steelers took two of our new production units, at US $8,000 apiece.
As we’ve watched how coaches use our robots, we’ve realized that the MVP can be more than just a tackling target. With more development, it could stand in for any player and take part in complicated plays. And though each MVP is now steered by remote control, we’re experimenting with ways to make them more autonomous. We can even imagine a futuristic football practice in which players jog onto the field and find an entire robotic team waiting for them on the line of scrimmage.
 Coach in Control: Dartmouth football coach Eugene Teevens steers the robot through maneuvers so players can practice tackling.Photo: Nathaniel Welch
Coach in Control: Dartmouth football coach Eugene Teevens steers the robot through maneuvers so players can practice tackling.Photo: Nathaniel Welch
“I love the game of football, but I love my players more,” said Eugene “Buddy” Teevens, coach of the Dartmouth football team, while testifying this past May at a U.S. congressional hearing on concussions in youth athletics. Despite increased attention on the issue, a recent study found that concussions are still on the rise among adolescents and young adults in the United States. Teevens, a leading voice for player safety, went before the committee to describe his radical response [PDF] to this crisis.
Dartmouth has a storied tradition of football dating back to 1876, and its team has won 18 Ivy League championships. So Teevens shocked the football world at the start of the 2011 season when he announced a complete ban on tackling at practice. Players could hit padded tackling sleds, but not each other. To put it bluntly, the players, fans, and other coaches all thought he was crazy.
They don’t anymore. Dartmouth has had winning football seasons every year since Teevens instituted the ban. But the coach kept wishing that he could safely approximate game conditions in practice sessions, allowing his defensive players to chase and tackle elusive runners. So in 2013 he brought a challenge to Dartmouth’s Thayer School of Engineering. Could students come up with a technology that would let players practice their tackling skills without injuring each other?
I was well positioned to help out. I’d been a defensive lineman under Teevens since arriving at Dartmouth in 2009 to study engineering, and I’d experienced the bruising toll of live practice drills. So I joined forces with Quinn Connell, now MVP’s director of engineering, and two other students, and we made Teevens’s challenge our senior-year project. We aimed to build a fast-moving robot that could realistically simulate a football player and withstand repeated tackles, and we promised to deliver it to the coach in six months. That goal, we soon discovered, was a bit too ambitious.
 The controller has a trigger and a wheel to manage forward propulsion and direction.Photo: Nathaniel Welch
The controller has a trigger and a wheel to manage forward propulsion and direction.Photo: Nathaniel Welch
Our original idea was to build a robot that would roll on a central ball so it could move quickly in any direction, mimicking a human player’s unpredictable runs. To keep our bot upright while in motion, we considered copying “ballbots” that use sensors and software to balance themselves. But we soon saw a problem with that approach. Players were supposed to knock down our dummy, and they shouldn’t be fighting a robot that’s actively trying to stay upright. So we simply added passive stabilizers, ringing the base with steel tubing that lightly skimmed over the ground while the robot rolled along.
We did build several prototypes using ball drives, but they brought other problems. We had trouble generating the right amount of traction in two places: between the ball and the small internal drivetrain wheels that controlled its spin, and also between the ball and the ground. While we scratched our heads, we looked at the next engineering challenge.
It was a tricky one. For the robot to be truly useful at a drill session it had to immediately pop up after each tackle, ready to be taken down by the next player. We used computer models to find a shape with the right center of gravity, ending up with something resembling a Weeble, the roly-poly children’s toy. We poured green foam into a mold to get the form we wanted—a human-height cone with a rounded base—and added big chunks of steel as ballast. Unfortunately, those additions made it too heavy to drive.
As the 2013 academic year came to a close, we rushed to finish our assignment. We added an off-the-shelf radio communications system to steer the bot via remote control, and we hooked in jumper cables to power the robot with the car battery taken from Connell’s Subaru. The robot technically fulfilled its design specifications, but we had to admit that we’d failed to build a truly functional prototype.

The inventors’ tale: We built a variety of models to figure out the best shape for the MVP robot, including an early one based on a paper cup [far left].





Our dummy spent the next year getting kicked from one storage space to another. In the fall semester of 2014, I began a master’s program in biomedical engineering at Dartmouth, while my classmate Connell left the United States for a job. We still believed in our project, but we had no time to work on it. I stashed the prototype in various lab spaces in the engineering building before finally moving it to my former fraternity house, where I parked it in a closet next to a stack of empty beer kegs. Then, in May 2015, I got a phone call from my girlfriend. She was parking her car near the frat house and spotted our big green dummy sticking out of a dumpster.
I raced over to rescue it, and as we heaved the rusty thing into her car I remembered how Connell and I had promised Coach Teevens a working device. I called Connell, who was then teaching at an outdoor education company in Colombia, and we decided to spend the summer working full time on the project. We launched a Kickstarter campaign to raise the modest sum of $5,000, and a handful of generous alumni matched that amount. If we didn’t have a working prototype by the summer’s end, we agreed, we’d put the project to rest once and for all.
Connell came back to campus, and we got to work. Though we’d both studied mechanical engineering, we didn’t need EE degrees to recognize that a lead-acid car battery was a poor fit for our project. We needed something lightweight with enough juice to move a human-size dummy quickly around the field. For inspiration, we looked to the U.S. TV show “BattleBots,” where contestants build powerful yet compact robots. We tried many different batteries and setups, with plenty of failures: More than once we left the football field with smoking wreckage when a drive system burned through wires or damaged the batteries. Eventually, though, we found a lithium battery that suited our robot.
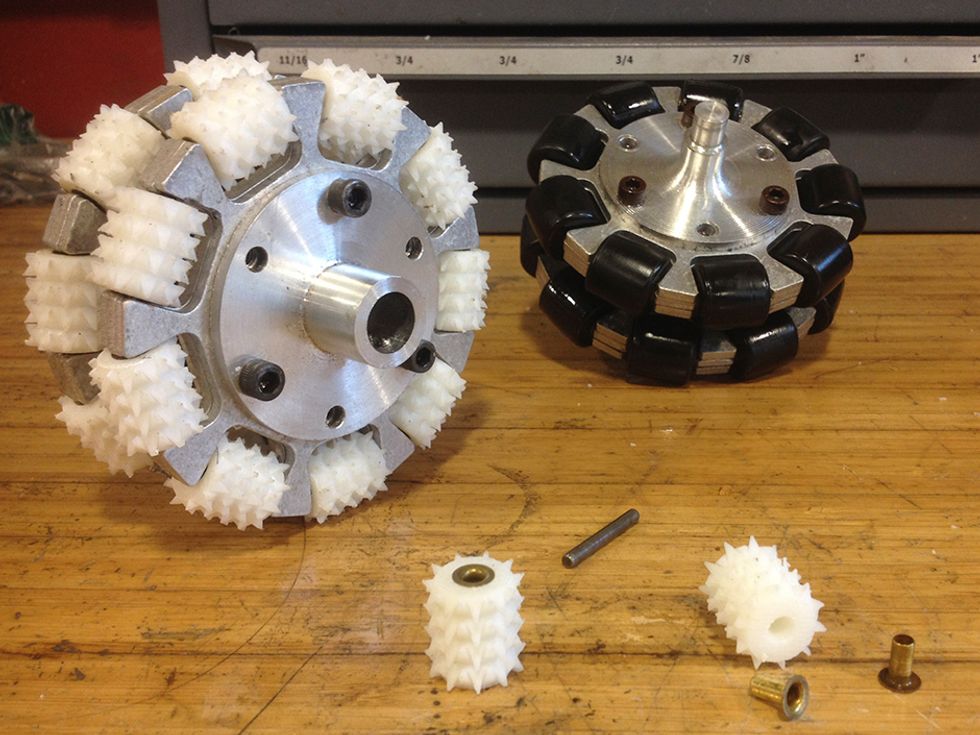
Our biggest goal that summer was to improve the ball drive. We tried many different air-filled balls, and we turned out dozens of intricate components on the engineering school’s 3D printer as we tried to get better traction between the drivetrain wheels and the ball. We eventually developed a housing mechanism where the ball was held in place with sprung casters, which kept it tensioned against the drive wheels. But those casters gave the dummy less clearance, limiting it to hard surfaces or smooth turf.
 MVP in the NFL: Players from the Pittsburgh Steelers work out with several robots in their practice facility.Photo: Molly Stifler
MVP in the NFL: Players from the Pittsburgh Steelers work out with several robots in their practice facility.Photo: Molly Stifler
By August, we had a robot that we could drive slowly straight down the field, but it still had lousy traction on grass and tended to drift rather than turn sharply. The pressure was on: Dartmouth’s football training camp was only weeks away, and we were also running out of budget. We were working around the clock and living on ramen noodles, but we still didn’t have a prototype that could meet Coach Teevens’s expectations.
It was time for something radical. So we gave up on the idea of having a perfectly omnidirectional robot and abandoned the ball drive, deciding to try wheels instead. Connell spent one long night with a computer-aided-design program to make a new model, and then we hit the machine shop. We took apart old tackling dummies to salvage their foam and roughed out a shape, then hastily installed an electric motor and the electronics. When we had everything put together, at the end of a late-night work session in mid-August, we took the robot for a spin around the deserted lab. We found to our surprise that it moved well—really well.
We loaded the dummy into the back of a truck, and during our drive to the football field we crossed paths with a Dartmouth rugby player who volunteered to help out with the first test. While Connell remotely steered the speedy robot in loops and zigzags around the field, our expert tackler repeatedly ran after the bot and took it down. We were delighted to see it pop up after each hit, ready for more action.
Later that day, our rugby friend tweeted a 30-second video of the test run, and something amazing happened: It went viral. Within 24 hours the video had been viewed 1 million times, and coaches and players were clamoring to buy the bot. When our heads stopped spinning, we realized that our robot could be much more than a school project.
On opening day of Dartmouth’s 2015 football camp, two prototype MVPs joined the burly players in their first tackling drill. Connell and I watched as huge defensive linemen took turns smashing into our padded robots, wondering if the electronics would hold up to this abuse. We had cause for concern: About 3 minutes into the drill, an MVP popped up from a hit with one wheel running continuously at full speed, making the robot spin around in tight circles. I hustled it off the field, and when we pulled it apart we discovered that a battery lead had been jarred loose and, astoundingly, connected itself directly to a motor lead, entirely bypassing the electronics platform controlling the voltage. After that incident we installed robust fuses, connectors, and fail-safes to prevent glitches that could cause robots to go rogue.
 Engineers and entrepreneurs: The author (left) and his MVP cofounder, Quinn Connell, turned their senior-year engineering project into a startup after a video of their tackling robot went viral.Photo: Nathaniel Welch
Engineers and entrepreneurs: The author (left) and his MVP cofounder, Quinn Connell, turned their senior-year engineering project into a startup after a video of their tackling robot went viral.Photo: Nathaniel Welch
The rest of the 2015 season came and went. Every day of practice the Dartmouth football team put the MVPs through their paces, and every night our team replaced bolts and repaired broken parts. Our final prototype weighed about 70 kilograms (150 pounds) and had a top speed of 32 kilometers per hour (20 miles per hour), which is fast enough to mimic a human player. It could rotate in place, turn on the proverbial dime, and weave between obstacles. We were pretty proud of it.
Still, turning a prototype into a commercial product seemed daunting. So we established a partnership with Rogers Athletic Co., a leading manufacturer of football equipment based in Clare, Mich., and the company built six beta units that we brought to spring training camps in 2016. We visited NFL teams such as the Steelers and the Ravens, top college teams like Michigan State, and a variety of high school teams.
That tour taught us plenty about the machine. While the robot rolled easily across artificial turf and well-manicured grass, rougher playing surfaces caused problems. At multipurpose high school fields, our MVP had trouble moving smoothly over the dirt in the baseball diamond’s running paths, particularly when the ground was muddy. We’re now addressing this traction challenge. We also worked through critical choices on materials for our components, switching out one Teflon-like material when we realized it was expanding in the heat of a practice session in Florida. American football is a tough sport, and its robotic players must be tough, too—the MVP should work through snow, ice, mud, rain, or scorching heat.
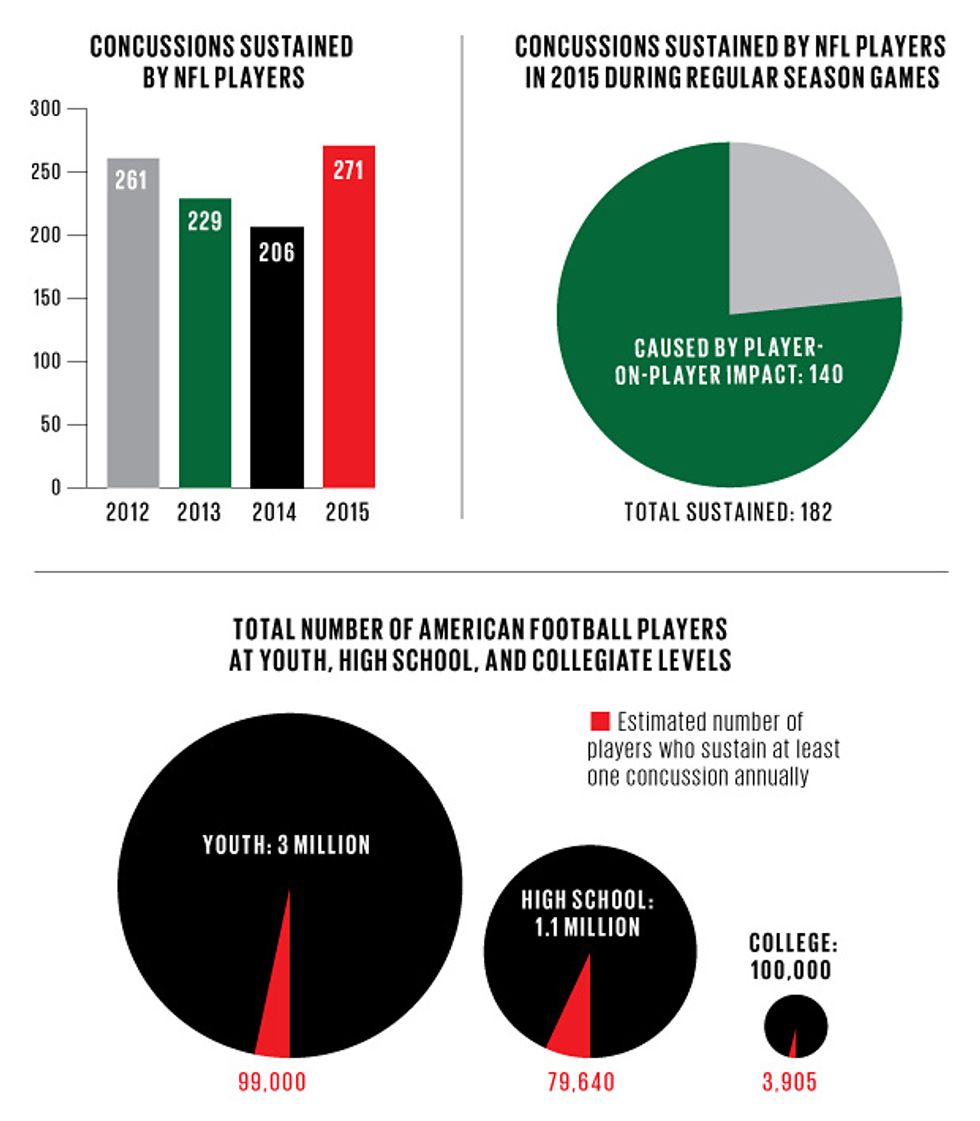 Sources: 2015 Injury Data, NFL, 2016 (top two charts); “Incidence of Concussion During Practice and Games in Youth, High School, and Collegiate American Football Players,” JAMA Pediatrics, 2015 (bottom)
Sources: 2015 Injury Data, NFL, 2016 (top two charts); “Incidence of Concussion During Practice and Games in Youth, High School, and Collegiate American Football Players,” JAMA Pediatrics, 2015 (bottom)
It took a while to find the best remote control system for the robot. Coach Teevens had originally imagined steering a dummy with a joystick, and we tried that method, adapting off-the-shelf gear to our purposes. When that mechanism proved awkward, we tried two thumb controllers to manage the throttle and steering separately. This system was better, but the coaches still didn’t get the hang of it right away. We settled finally on a better two-part control system: a trigger that the user pulls to power the bot forward and a steering wheel to control its direction.
I’d like to reveal more technical details about the final design. But as a startup entering the competitive sports equipment industry with a novel new product, our company must protect its intellectual property. In August 2016 we distributed our first limited-release batch of commercial MVPs. We sold 25 of those units to high school, college, and NFL teams, and we’re planning a full release for January 2017.
Our challenge now is to make our dummies smarter. The current MVP is steered by someone on the sidelines, but coaches have asked if future robots can be programmed to move independently along their routes. For that kind of autonomy, the MVP will need an onboard operating system that uses localization and mapping to establish its position on the field. The OS could also support a local-area network that lets MVPs communicate with each other—potentially enabling us to field an entire robotic team, with MVPs working in concert to execute plays.
Some NFL and college coaches also want an MVP that logs data about tackles or running routes. While it would be relatively easy to add sensors to our robot, these extra electronics could make it too expensive for youth-level football programs with tight budgets. That’s a real concern for us, as our overarching goal is to protect all players and reduce the number of hits they take over their entire football careers. We’re now thinking of building different models to cater to different markets.
The need is greater than ever. American football is in jeopardy of losing a generation of participants because many parents have concluded that the game is too dangerous for their kids. But like Coach Teevens, many still love the sport and appreciate the life lessons it can teach. If the MVP allows young players to put on their helmets and take the field with a lot less risk, it will earn its title as most valuable player.
This article appears in the October 2016 print issue as “The Hard Knocks Bot.”
About the Author
Elliot Kastner is a graduate of Dartmouth College’s Thayer School of Engineering and former defensive lineman on the Dartmouth football team. Kastner focused his undergraduate studies on mechanical engineering, then continued at Thayer to earn a master’s in biomedical engineering. Since cofounding MVP, Kastner has guest starred on ESPN’s SportsCenter and “The Late Show With Stephen Colbert.” Kastner is currently MVP’s director of research and development.