
In the 1970s, cameraman Garrett Brown wowed the movie industry by inventing the Brown Stabilizer, soon renamed the “Steadicam”: a mechanical system for stabilizing motion-picture cameras as they are carried about. Brown’s device relied on a clever arrangement of well-balanced counterweights, and it permitted shots that would have been very difficult, if not impossible, to obtain previously, including many of the action scenes in 1976’s Marathon Man and Rocky.

Now the electronic counterpart to Brown’s innovation is shaking up filmmaking—especially low-budget filmmaking. Driving much of the excitement is the US $15 000 MōVI M10, a camera-stabilization rig that Freefly Systems began shipping in August, and which costs about a third as much as a high-end Steadicam rig. Instead of Brown’s counterweights, the M10 detects motion with gyroscopes and accelerometers. A microcomputer uses signals from these sensors to slew motorized gimbals to compensate for the operator’s movements.
Although the MōVI M10 is inexpensive by movie-industry standards, it’s still too pricey for many low-budget professionals, let alone amateur videographers. But cheaper stabilizers that work similarly to the M10 will soon be on sale, including the $3000 BeSteady One and the approximately $1800 Ghost, both of which completed successful Kickstarter campaigns in August.
I don’t do much videography, but not long ago I needed to gather footage of an electronic bicycle derailleur in operation [see “Ride By Wire,” IEEE Spectrum, May 2013]. I cobbled together a home-brew Steadicam for that task, but it tended to “weather-vane,” making it hard to keep pointed at the subject. And once it began to wobble, the pendulum-like motions would continue unabated. So an electronically stabilized camera platform seemed an attractive thing for future videos.
But I didn’t have thousands of dollars floating around. I did, however, discover that the MōVI, the BeSteady One, and the Ghost share a common technical heritage—they’re all handheld versions of the kind of stabilizers that hobbyists are increasingly using to mount small video cameras under model helicopters. These gimbal systems use brushless DC motors in an unusual mode, one that’s akin to microstepping a stepper motor but without the low-speed vibration found with most steppers.
After combing the Web, I settled on what’s probably the cheapest example around, one based on a brushless gimbal controller developed by a German group, for which the Arduino-based open-source hardware and software are readily available. Its chief limitation is that it provides only two axes of control—tilt and roll. That’s normally all that’s needed, because a helicopter can yaw around smoothly, panning an attached camera across the scenery. (Three-axis open-source controllers are available, but they looked immature to me.)
Had I been really penny-pinching, I could have purchased brushless motors and a controller board from China and fabricated all the mechanical parts from plywood. But I was anxious to give this technology a try as soon as possible. On eBay, I purchased a $279 kit containing a controller board, a compatible inertial-measurement unit (IMU), two brushless motors, and various aluminum and carbon-fiber parts to complete the rig. Coming from an Ohio-based seller, the package took only a few days to arrive at my door.
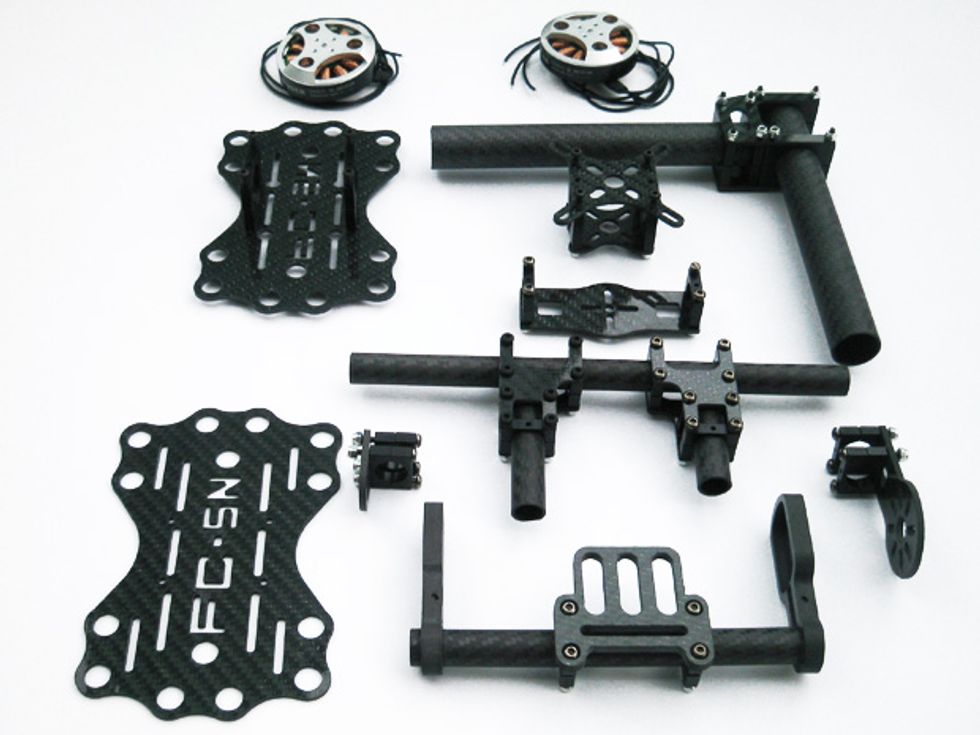 Some assembly required: Mechanical assembly of the gimbal kit was straightforward, and the modifications made were all easy ones.Photo: David Schneider
Some assembly required: Mechanical assembly of the gimbal kit was straightforward, and the modifications made were all easy ones.Photo: David Schneider
Although the kit came with no instructions, assembling the parts went well enough. I encountered only two problems, both small: An aluminum cone holding a ball bearing needed an extra screw stuck in the back to work without binding; and the video camera I wanted to use, being on the large side, bashed into the back of the rig. I used a wooden dowel to extend the frame, which worked splendidly, although it looked a little out of place on such a spiffy rig.
I downloaded the Arduino code for the controller board, programmed it, and fired up the system, fully expecting it to do strange things. After all, I had attached the three windings of each motor to the controller at random and wasn’t even sure how to orient the IMU board when attaching it to the camera. To my astonishment, the thing worked pretty well straight off. I spent a while tuning the feedback loops using some PC software the German group wrote that provides a graphical user interface for this task. But even that didn’t take long.
With such a good start, I figured I’d try to adapt this system to control the tilt and pan axes rather than tilt and roll. Then, if I added a video transmitter to the camera and a radio-control receiver to the controller, a second operator could point the camera while the first operator concentrated on keeping it in position, as can be done with the MōVI M10. To further imitate that pro-level system, I added a two-handled support, made from a short length of PVC sprinkler pipe (bent with the aid of a heat gun) and a couple of bicycle handlebar grips.
The software had no provision for making this change of axes, but I discovered that all that was really needed was to temporarily disable the accelerometers in the IMU and then rotate the frame, camera, and IMU board by 90 degrees. The system still “thinks” it’s controlling roll and tilt, but what was originally the roll axis is now pan. My modified system did suffer some strange couplings between the two axes, though, causing the tilt axis to jitter when I panned the camera by too much.
I poked around at the Arduino software in hopes of fixing this issue, but the code is very complicated, and my efforts were of no avail. So I simply disable the tilt-axis motor (by unplugging it) when I want to use the camera in remote-controlled-pan mode, although for reasons I can’t explain, smooth panning is limited to plus and minus 60 degrees of the initial heading. Okay, so it doesn’t work nearly as well as a MōVI rig, but it’s still not bad, and it looks almost as cool as one. And what do you want for less than a 50th of the price?


