
Today is christening day for DARPA’s Sea Hunter, a full-scale prototype of an autonomous surface vessel that’s designed to be able to launch from a pier and go out on its own for weeks or months at a time, for thousands of miles at a stretch.
The 132-foot-long, diesel-powered vessel was built by U.S. defense contractor Leidos under DARPA’s ACTUV program, a somewhat clunky nested acronym that stands for Anti-Submarine Warfare (ASW) Continuous Trail Unmanned Vessel.
The ship, now a joint project with the U.S. Office of Naval Research, was originally conceived as a tracker of stealthy diesel-electric submarines, but it’s a flexible platform. “What we’ve kind of realized over the course of the program is that it’s a truck,” program manager Scott Littlefield tells IEEE Spectrum. “It’s got lots of payload capacity for a variety of different missions.”
Unmanned ships are nothing new. They can, for example, be launched far from shore off a larger vessel and controlled remotely by a human operator. But this arrangement places constraints on the size of such a ship, and its range as well, since it can only carry so much fuel.
ACTUV explores what can be done with a stand-alone vessel, one that could launch from a pier. Launching in this way frees up the size and range constraints on the ship. But it also raises the rather undesirable prospect of trying to remotely operate a ship thousands of miles away via satellite. “You really don’t want that to be a remote-controlled vessel,” says Littlefield. “You want it to be fairly autonomous so that it can do things like obstacle avoidance on its own without being joysticked around by a person.”
Building that autonomy, Littlefield says, “was probably the most difficult technical challenge from a DARPA perspective.” To cross the seas the ship must adhere to the Convention on the International Regulations for Preventing Collisions at Sea, a set of rules that govern, among other things, when a vessel has the right of way and should stay the course and when it is supposed to “give way,” maneuvering itself to avoid a collision with another ship.
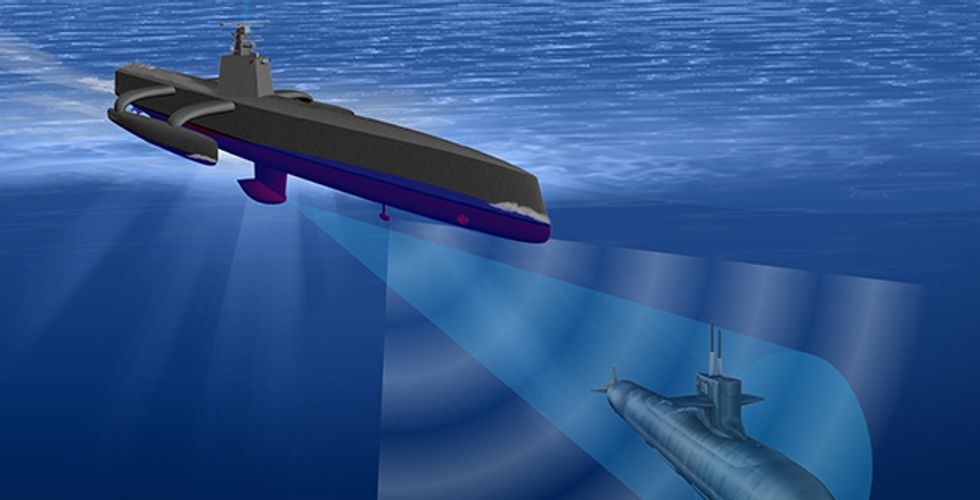 ACTUV was conceived as a tracker of stealthy diesel-electric submarines.Image: DARPA
ACTUV was conceived as a tracker of stealthy diesel-electric submarines.Image: DARPA
Since the maneuver has to be detectable by the operator of the other vessel, it can’t be too subtle. “Course changes are preferred to speed changes because they’re more observable,” Littlefield explains. So is one big change as opposed to a series of smaller ones: drama over precision, you might say. “To some degree you want to make the maneuvers appear as though they’ve been made by a human operator,” he says. “That’s what other people are going to expect to see.” Dauntingly optimized traffic situations, like this vision of a future intersection where all the cars are autonomous, will have to wait.
Some of ACTUV’s autonomous testing has already been done over the last two years or so using a “surrogate”—a 40-foot work boat based on the U.S. Gulf Coast that has the same software and above-water sensors. That ship, with human monitoring, made an autonomous voyage from Gulfport, Miss., to nearby Biloxi. Although it was a short distance, Littlefield says the waterway is fairly congested and so a good test.
Sea Hunter, which is currently in Portland, Ore., will soon be shipped south to San Diego, Calif. When it arrives in May, Littlefield says, engineers will be ramping up testing of its autonomous functions. The vessel is slated for two years of testing in San Diego, he says. During that time, DARPA will hand the vessel off to the Office of Naval Research.
Sea Hunter uses radar and an automatic ship identification system to keep track of its surroundings. The ACTUV research team is also exploring using cameras to help with visual classification of vessels, since rules vary with vessel type.
Here’s a video of a very clean-looking Sea Hunter during its launch in January and a subsequent speed test.
Follow Rachel Courtland on Twitter at @rcourt


