
After exiting the air lock, an astronaut uses the thrusters on her space suit to propel herself toward a nearby asteroid. With great care, she gets as close and as steady as she can in preparation for knocking a few samples off the surface. But with very little gravity to anchor her, the strike of her hammer throws her backward in an uncontrolled tumble.

This scenario may sound a bit comic, but it’s one that engineers will have to keep in mind as they design ways to once again send astronauts out beyond low earth orbit—to a piece of an asteroid brought close to the moon by a robotic spacecraft, according to NASA’s current plans; to other small bodies in deep space; and on long missions to what could be our generation’s ultimate destination—Mars.
Of the myriad dangers and difficulties associated with space travel, weightlessness places some of the biggest demands on an astronaut’s body. The absence of gravity can wreak havoc on an astronaut’s physiology, causing muscles to atrophy, weakening bones, and producing disorientation and unsteadiness that can persist even after the return home.
The lack of gravity also turns each space walk into a precise dance. Even the slightest nudge against a surface will push an astronaut off in the opposite direction. This challenge will only become greater once people start exploring environments where they don’t have the benefit of handholds and robotic arms, which astronauts now use to move around the exterior of the International Space Station (ISS).
Fortunately, there is a technology that could help address these sorts of difficulties: the control moment gyroscope, or CMG. Unlike the sensor-type gyroscopes found in smartphones and other gadgets, the CMG is an actuation device. It uses a spinning mass to rotate an object or resist such movement, in the same way that changing the rotation axis of a spinning bicycle wheel while you’re seated in a chair can cause you to turn.
 A control moment gyroscope, such as the single-gimbal variety here, uses the angular momentum of a spinning mass (center) to create torque. Rotating the spin axis of this mass using a gimbal (blue arrow) generates a torque in the direction of the red arrow. A body attached to the CMG will rotate around this red axis (clockwise from this perspective).Illustration: James Provost
A control moment gyroscope, such as the single-gimbal variety here, uses the angular momentum of a spinning mass (center) to create torque. Rotating the spin axis of this mass using a gimbal (blue arrow) generates a torque in the direction of the red arrow. A body attached to the CMG will rotate around this red axis (clockwise from this perspective).Illustration: James Provost
Today, CMGs are employed to steady a range of spacecraft, including Earth-observation satellites and the ISS. At Draper Laboratory, in Cambridge, Mass., we’re working to make this technology compact enough for astronauts to wear and yet powerful enough to restore some of gravity’s greatest advantages. Placed on a flight suit, our CMGs could be used to resist an astronaut’s movement, helping to mitigate some of the effects of long-term weightlessness. Similar modules could be placed alongside thrusters on astronauts’ manuevering units to help improve their stability when performing repairs and exploring low-gravity environments. With any luck, when humans put the first footprints on the Red Planet, they’ll find the adjustment won’t be nearly as abrupt as they expected.
Our work adapting CMGs for use on space suits began when we started considering astronauts’ experiences inside their spacecraft. Astronauts en route to Mars will experience half a year or more of weightlessness, and like any good system, the human body will react by adapting to its new environment: The cardiovascular system will become deconditioned, muscles will shrink and weaken, and bone mineral density will decrease.
The lack of gravity also affects sensorimotor functions and the vestibular system, the inner-ear sensory organs that control our sense of balance. Astronauts have reported spatial disorientation, motion sickness, balance instability, and difficulty maintaining coordination when walking or performing tasks that require fine motor skills. Many of these symptoms manifest themselves during gravitational transitions, such as after launch or landing. Unfortunately, these transitions occur during critical times when astronauts’ physical and cognitive performance is crucial for their own safety and their mission’s success.
Because NASA currently has no plans to build a giant spinning centrifuge ship à la 2001: A Space Odyssey to create artificial gravity for Mars-bound astronauts, we decided to explore an alternative: a personal resistance suit that could mimic some of gravity’s effects.
Gyro Power
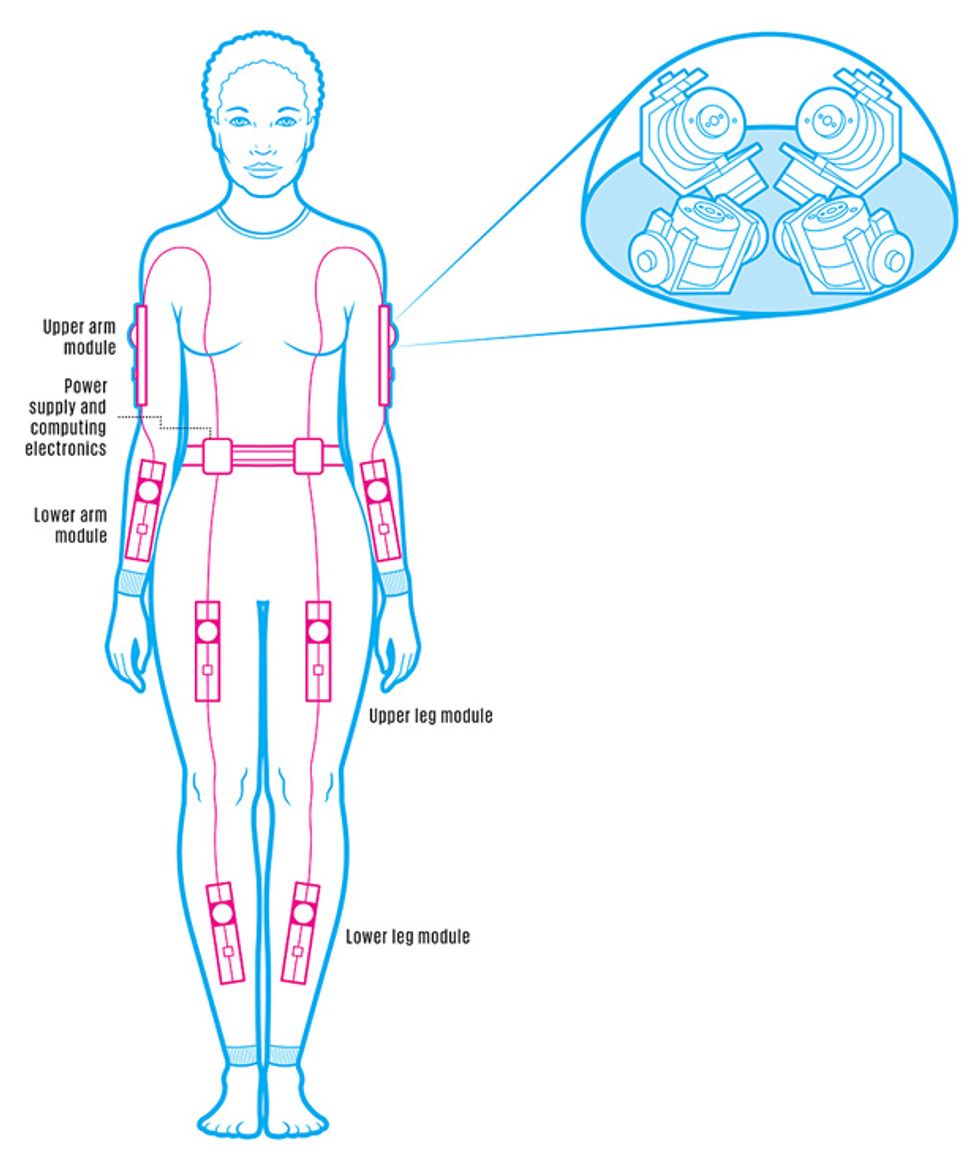 Modules mounted on the upper and lower arms and the upper and lower legs could be used to resist limb movement in space. A single module might contain four control moment gyroscopes, mounted in a pyramidal configuration. These gyroscopes can be programmed to work in concert to provide torque in a particular direction, providing a feeling of resistance similar to that of gravity.llustration: MCKIBILLO
Modules mounted on the upper and lower arms and the upper and lower legs could be used to resist limb movement in space. A single module might contain four control moment gyroscopes, mounted in a pyramidal configuration. These gyroscopes can be programmed to work in concert to provide torque in a particular direction, providing a feeling of resistance similar to that of gravity.llustration: MCKIBILLO
In collaboration with researchers at MIT and at the David Clark Co., in Worcester, Mass., we designed the Variable Vector Countermeasure Suit, or V2Suit, with initial support from the NASA Innovative Advanced Concepts program. It would look much like an ordinary flight jumpsuit. The main difference is that it would be equipped with small modules to be worn on the arms and legs, one for the upper and one for the lower section of each limb. Each module contains a sensor system to measure the limb’s orientation and its linear and rotational motion, and four CMGs to resist that rotational motion. A module on a belt would contain the system’s power and the processor needed to compute how the CMGs should react.
The CMGs we chose for the task each contain a cylindrical mass that spins at constant speed. This rotor is itself mounted on a gimbal. When the gimbal rotates, it changes the orientation of the rotor’s axis. When the rotor is spinning—which it can easily do at 15,000 or so revolutions per minute—the change in the orientation of its spin axis imparts a rotational push, or torque.
The modules can be programmed to recognize an arbitrary direction as representing “down.” The CMGs will then move to create resistance with the appropriate strength and direction whenever the astronaut moves against the “down” direction. If an astronaut programs “down” to mean the floor of the spacecraft, then raises an arm in the direction of the corresponding ceiling, the CMGs on that arm can orient themselves to oppose that motion, resulting in a feeling of resistance, as if the astronaut were moving her arm through a vat of molasses.
That’s not the same thing as creating artificial gravity, of course. An astronaut’s inner ear won’t operate any differently, for example, and she might still experience motion sickness. And while the suit might help astronauts get a more robust workout, other measures will likely be needed to counteract the depletion of bone mass and muscle strength. Those strategies could include exercise, perhaps inside a one-person centrifuge, and tight-fitting suits like the “penguin suits” developed by the Russian space program, which use elastic to put pressure and tension on muscles.
But CMGs could really help in improving eye-hand coordination. When we move our arms and legs, our brains take gravity into account. Making the switch to zero gravity can cause an astronaut to miss her target by failing to compensate for the sudden absence of pull when she tries to move a limb. The opposite effect can occur when returning to Earth. The resistance offered by CMGs could help astronauts acclimate to the gravitational environment of their destination, enabling them to practice how to move and work smoothly months in advance of their arrival.
The trick will be making sufficiently powerful CMGs that can fit in a small, wearable package. It’s not yet clear how much resistance we need to offer astronauts, but when we set out to make our prototype CMG array we aimed to have it provide as much as 1 newton meter of torque. That’s about what you’d feel at your shoulder if you were holding a full soda can with your arm straight out to the side.
This level of torque is easy to achieve with a larger CMG. It can also be made with a tiny one that spins very fast, although a smaller CMG has less of a range of angular momentum to work with. It also won’t be able to operate as long as a larger CMG without having to be reset, by unwinding each of the gimbals.
Thankfully, CMG design has improved considerably in the last few decades, and we were able to use commercial parts to build relatively compact and inexpensive prototypes. Our current model, which was completed last year, is about 20 centimeters on a side and 10 cm high. This is still larger than we’d like for astronauts to wear, but the module is not optimized for size. It contains, for example, a fairly large safety enclosure to make sure the spinning parts stay contained and can’t injure anyone experimenting with it. Our next step is to begin testing the module on people on the ground to see how they perceive different magnitudes of resistance. From there, we plan to transition to tests aboard airplanes flown in parabolic arcs, which offer their passengers brief periods of weightlessness.
Not long after we began working on the V2Suit, we started exploring how CMGs might also help astronauts moving around outside a space vehicle to perform repairs, for instance, or to propel themselves to an object of interest.
Today, astronauts generally navigate in the vacuum of space using safety tethers, robotic arms, and handholds attached to their vehicles. In the past, maneuvering units—backpacks equipped with jetlike thrusters—were used to perform space walks without an attachment to a vehicle. Today, astronauts on the ISS wear such jet packs, but they’re designed to be used only in case of emergency.
As planners contemplate missions beyond low earth orbit, they’ll want thruster systems that can be used more routinely, so that astronauts can propel themselves across empty space to explore new objects and maneuver with as much freedom as possible outside their spacecraft in case emergency repairs are needed.
But thrusters by themselves are a brute-force solution, especially when you consider the possibility of visiting low-gravity objects, such as asteroids and Martian moons. Because they’re essentially miniature rockets, thrusters are great for moving in a line from one point to another. But they’re not as effective at maintaining a constant attitude—the rotational orientation of a body.
Imagine that an astronaut’s suit has two thrusters attached behind the shoulders, one pointed to the left and the other to the right. One thruster is designed to rotate the astronaut clockwise and the other counterclockwise. The control system can command the thrusters to fire whenever the astronaut rotates away from the target attitude.
It’s a simple approach, but it’s imprecise. The astronaut will never sit exactly at the commanded attitude; she’ll be pushed in one direction and then the other when she overshoots, bouncing back and forth around the desired orientation. The process eats fuel, limiting the amount of time that can be spent performing extravehicular activities. And if the astronaut happens to be near the surface of an asteroid, she’d risk kicking up dust clouds, potentially contaminating the area she’s trying to sample.
CMGs could offer better control. And it turns out that CMGs have actually been used before. Astronauts flying on NASA’s Skylab space station in the 1970s experimented with an early mobility unit that contained both thrusters and CMGs, but those CMGs were quite massive and power hungry. Later, when the agency’s Manned Maneuvering Unit was being developed, CMGs were found not to be necessary. NASA determined that astronauts could perform extravehicular activities, such as spacecraft maintenance and satellite retrieval, by maneuvering at the end of a robotic arm or with thruster-only jet packs.
After several decades of advances in manufacturing and with NASA’s new low-gravity mission objectives in mind, our team at Draper, along with researchers from MIT and NASA Johnson Space Center, decided to revisit the Skylab idea.
The CMG module design we settled on for the jet pack looks quite similar to the one we used in the V2Suit; it too is made up of an arrangement of four individual CMGs. The jet-pack CMGs are a bit larger, though, each about the size of a baseball, and are designed to produce as much as several newton meters of torque, which should be enough to prevent astronauts from pushing themselves into uncontrolled spins if they need to sample the surface of a low-gravity body.
Picture our astronaut floating in the vacuum of space. If she dips to her side into a sideways cartwheel, she is spinning about her roll axis; leaning forward or backward in space, she is rotating about her pitch axis. When she twirls around to change the direction she’s facing, she is moving about her yaw axis. So to fully control an astronaut’s attitude, we needed at least three CMGs—one to control pitch, one for roll, and one for yaw.
Keeping Steady
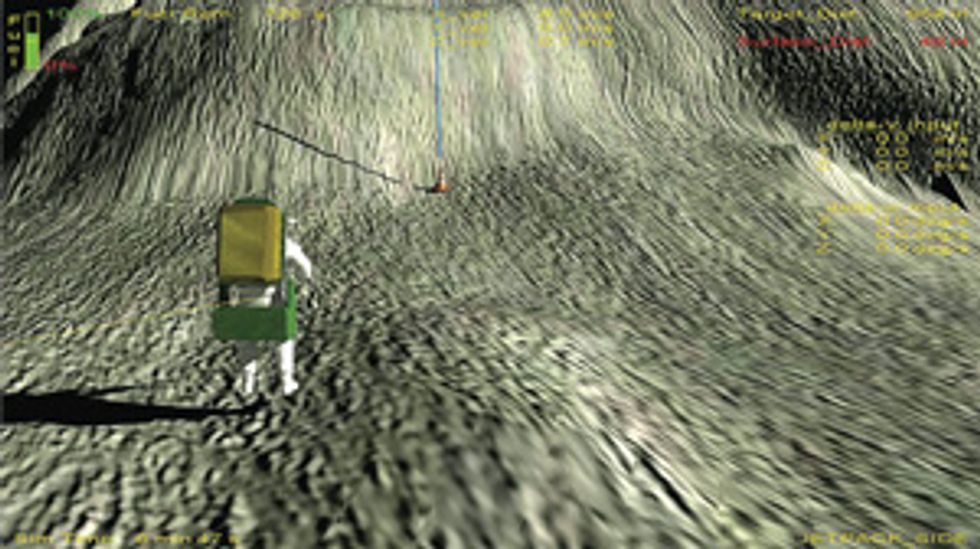
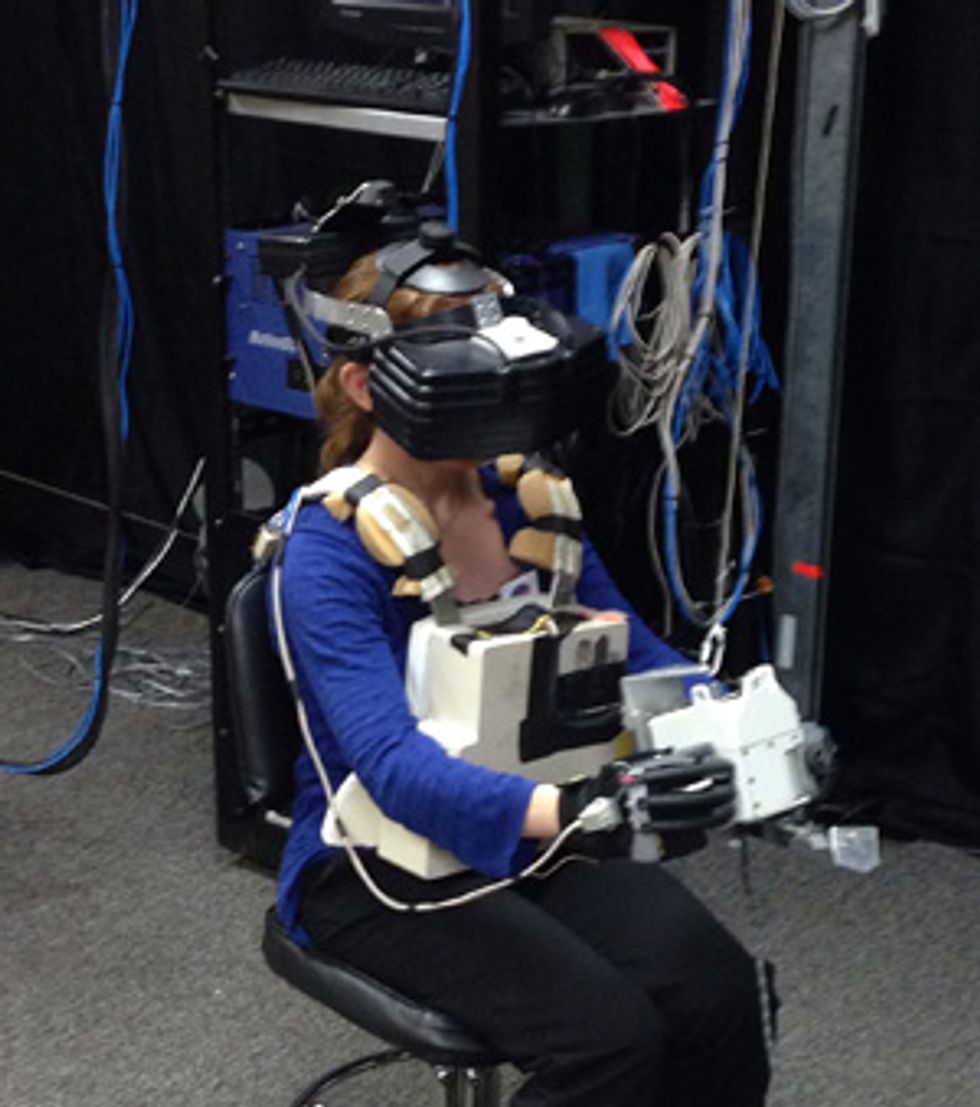
 Virtual-reality simulations (top and middle images) were used to test whether a CMG-equipped jet pack could better enable an astronaut to control his or her attitude on an approach to an asteroid’s surface and while performing basic tasks. Prototypes (bottom image) of the CMG modules that astronauts might one day wear on their arms and legs have been tested in the lab.Photos: Draper Laboratory (3)
Virtual-reality simulations (top and middle images) were used to test whether a CMG-equipped jet pack could better enable an astronaut to control his or her attitude on an approach to an asteroid’s surface and while performing basic tasks. Prototypes (bottom image) of the CMG modules that astronauts might one day wear on their arms and legs have been tested in the lab.Photos: Draper Laboratory (3)
In practice, we used four. That’s partly so there’s a backup in case one fails. It’s also to help the gimbals avoid what’s called a singular configuration, which can occur when two or more of the CMGs cancel one another out or when the gimbals can’t be moved any farther in a particular direction to provide additional torque. Well-designed control software, which would operate all four CMGs at once, can recognize when one of these problems threatens system controllability. It will then either steer the CMGs away from a singular configuration or apply torque using thrusters so that the gimbals can be oriented away from their extreme positions, giving the CMGs some breathing room.
Last year, we used a computer-simulated mission to an asteroid to test three different jet-pack schemes: one with only jets and two with a combination of jets and different sizes of CMGs. Our experimenters tried to navigate a virtual asteroid while maintaining a certain attitude, by using a video-game controller and virtual-reality goggles. We also performed computations to simulate the physics involved in an astronaut removing a tool from her belt and performing reaching motions with the tool in hand.
When carrying tools, our test subjects preferred to work with the jet pack containing thrusters and the larger CMGs. It’s harder to get these CMGs into a singular configuration because they can store more angular momentum. We found that the gyroscopes not only improved stability, they also cut fuel consumption by two-thirds. Of course, there are trade-offs to adding CMGs. The most important is that gyroscopes need electricity to function. Adding CMGs to a mobility unit as well as a battery to power them could add a fair amount of mass, thus increasing launch costs. But we expect that over their lifetime, CMGs will come out ahead in the cost-benefit equation.
Of course there are still open questions. Although we tested a mock asteroid encounter using VR goggles, we won’t know how an astronaut feels using our equipment until someone tries it in a weightless environment.
We recently took a step in that direction, by testing a combined CMG and thruster system on a free-floating satellite experimentation platform during a series of parabolic flights. The flights were our first opportunity to see how well our combined CMG-thruster system could maintain a stable attitude in a microgravity environment. In the future, we hope to test a scaled-up CMG system in similar flights with human subjects.
A key consideration will be how easy the system is to use. Today, astronauts command maneuvering-unit thrusters with a hand controller through their bulky gloves. A hands-free interface, perhaps controlled using foot pedals or voice commands, might ultimately prove simpler.
We’re still in the early days of figuring out how to make long-duration flights safer and finding ways for astronauts to perform well outside their craft without having to rely on handholds and tethers. The gyroscope systems we’re working on should indeed help combat some of the problematic effects of weightlessness. A decade from now, space might feel a little less ethereal for astronauts than it does now. And that will be a good thing.
This article originally appeared in print as “A New Spin on Space Suits.”
About the Authors
Michele Carpenter and Kevin Duda are engineers with Draper Laboratory, in Cambridge, Mass. Of the two research projects they describe in this feature, Duda has focused on using control moment gyroscopes on astronaut flight suits to provide resistance. Carpenter has been working on jet-pack versions of the devices and recently joined a team on a series of parabolic flights to test the technology in zero gravity.