The Conversation (0)

No Hands: Machines do the heavy lifting at a Staples Denver facility.
Photo: Joel Eden Photography/Kiva Systems
“The beauty of our system,” Raffaello D’Andrea says as he paces across the warehouse, “is that you don’t have to walk over to the shelves to get things—the shelves come to you.” With that, he motions toward some 200 blue plastic racks sitting at the center of the building. A mechanical whir fills the room. And then the robots appear.
Two dozen squat machines, like orange suitcases on wheels, scurry on the floor. They park underneath the man-high racks and start pirouetting; the spinning is part of the mechanism that jacks the racks off the ground. One robot hauls shelves with 12-packs of Mountain Dew; another carries bottles of Redken shampoo. They move along straight lines and make 90-degree turns, maneuvering just 15 centimeters from each other. It’s a bit like Pac-Man.
This is the demonstration facility of Kiva Systems, a start-up in Woburn, Mass., just north of Boston, that wants to reinvent the centuries-old warehouse business. Kiva’s idea is simple: by making inventory items come to the warehouse workers rather than vice versa, you can fulfill orders faster. A computer cluster keeps track of all robots and racks on the floor, and resource-allocation algorithms efficiently orchestrate their movement.
“When you see these things moving, you think, ‘Oh my goodness, they’re going to hit,’ ” D’Andrea says. “But of course they never do.”
D’Andrea should know. He wrote the robots’ control algorithm. An engineering professor formerly at Cornell University and now at ETH, the Swiss Federal Institute of Technology, in Zurich, he joined Kiva after meeting Mick Mountz, a graduate of MIT and the Harvard Business School, who conceived the idea of using mobile robots to manage inventory. The third founder is Peter Wurman, an expert in multiagent systems and a former professor of computer science at North Carolina State University, in Raleigh.
 Step Up: Kiva’s founders (from left), Peter Wurman, Mick Mountz, and Raffaello D’Andrea, envision thousands of robots in warehouses.Photo: Joshua Dalsimer
Step Up: Kiva’s founders (from left), Peter Wurman, Mick Mountz, and Raffaello D’Andrea, envision thousands of robots in warehouses.Photo: Joshua Dalsimer
Raff, Mick, and Pete, as they’re known, form a triumvirate of sorts. D’Andrea and Wurman, who are called engineering fellows, oversee system architecture and algorithm development; Mountz, the CEO, drives the business. “They’re a well-oiled machine,” says one engineer at the company.
After four years perfecting its system, Kiva now faces the challenge of convincing potential customers to switch from conventional warehouse technologies to a fleet of mobile robots. Today’s most automated distribution centers rely on vast mazes of conveyor belts, chutes, and carousels. Human operators stand along the conveyors, near inventory shelves, grabbing products and putting them into boxes or totes rolling past them. It’s the assembly-line approach that most warehouse managers are used to, and it hasn’t changed much in the past 100 years. In fact, for many of them the idea of handing over their inventories to robots is a big departure, if not a crazy proposition.
“Kiva has an inherent degree of flexibility that a lot of the more traditional storage and picking technologies don’t,” says William L. Vincent, a principal with Tompkins Associates, a supply-chain-technology consultancy in Orlando, Fla. “But many customers are scared of the latest whiz-bang toys and prefer to wait until they get a little bit more history.”
Maybe that’s one reason Kiva avoids the label of “robotics company.” “We invented a solution for fulfillment,” Mountz insists. He says that the Internet has made shopping effortless for consumers and now it’s time for the back end to catch up. Kiva claims that its system makes it easier to set up and manage a warehouse and that it can boost order-fulfillment speed to three times that of conveyor-based operations. “We turned what is normally a serial process into a massively parallel process,” he says.
Mountz’s pitch appears to be working. Since 2004, Kiva has amassed US $18 million in funding from Bain Capital and other investors. It has also signed up three heavyweight customers. The office supply giant Staples uses 500 Kiva robots at its 30 000-square-meter fulfillment center in Chambersburg, Pa., and has equipped an entire warehouse in Denver with the robotic system. Walgreens, the drugstore chain, is using hundreds of Kiva robots at a distribution center in Mt. Vernon, Ill., to prepare cases with inventory to restock stores. And Zappos, the online shoe store, is adding Kiva robots to part of its massive fulfillment center in Shepherdsville, Ky., which began operation three years ago and now houses 4.2 million shoes, handbags, and clothing items.
“If I’d known about Kiva back then,” says Craig Adkins, vice president of fulfillment operations at Zappos, “I’d have built the entire building with nothing but Kiva.”
D’Andrea says that this is the first time hundreds of autonomous robots have been put to work together on a commercial application. He probably knows more about the orange, wheeled machines than anyone else, but with a hectic travel schedule, he’s one of the few Kivans—as the staff calls itself—who has never seen the robots in action at a customer’s site. “As soon as we have an installation with over 1000 robots,” he says, “I’ll be one of the first there.”
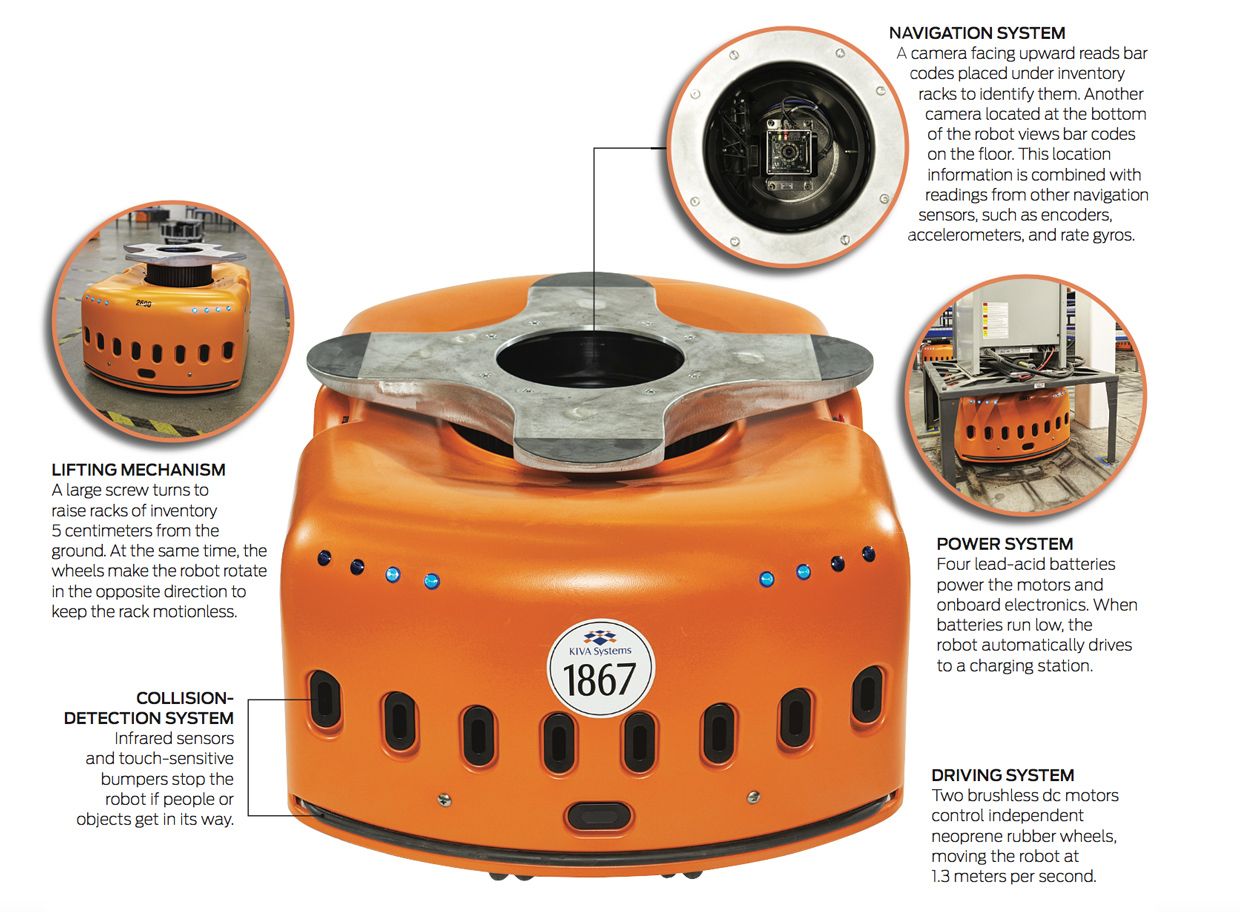
Squat and Smart
Kiva’s robots have more than 900 parts, from off-the-shelf dc motors to custom‑made ball screws. Here’s how the robots’ main systems work
Kiva’s Woburn facility is a typical technology start-up. Engineers park their bicycles in their cubicles, take breaks at a Ping-Pong table, and spice their talk with such industry jargon as “eaches” (individual items) and “sortation” (separating inventory into groups). They don’t name their robots but simply call them “drive units.” If you hear that one “needs a drink,” that just means it’s going to get a battery recharge.
But to understand what the company does, you have to step into the warehouse, where Kiva has set up its 1000-square-meter demo facility. When I visited this past February, D’Andrea gave me an overview of the system. The robots, he explains, navigate the warehouse by pointing cameras at the floor that read two-dimensional bar-coded stickers laid out by hand 1 meter from each other, in a grid. The robots relay the encoded information wirelessly to a computer cluster that functions both as a dispatcher and a traffic controller. It instructs, for instance, robot No. 1051 to bring rack No. 308 to worker No. 12—without colliding with robot No. 1433, which is crossing its path.
To fulfill an order, a human operator stands at a pick-and-pack station on the perimeter of the warehouse. Robots crisscross the floor—they even use elevators to get to a mezzanine—and find specific racks to carry to the station. When the first robot positions itself in front of the worker, a laser pointer on a metal pole shines a red dot on a product. Once the worker has retrieved the item, the robot departs and another one takes its place.
In a typical conveyor-based operation, a worker can pick 200 to 400 items per hour. The Kiva robots can present a new item to a worker every 6 seconds, leading to a base rate of 600 picks per hour, with Walgreens reaching a rate of more than 700. Kiva says a large warehouse performing 200 000 picks a day would require two 75-person, 8-hour shifts if it used conveyors. With Kiva’s technology, just 25 people a shift would be enough to get the job done. The company says equipping a 10 000-square-meter facility costs between $4 million and $6 million, which is less than what a conveyor system would go for.
D’Andrea says that setting up a warehouse becomes much easier with the robots. Building a conveyor system can take 12 to 18 months for a large warehouse; a Kiva deployment, by contrast, takes weeks rather than months. Last year, when Staples had to relocate its Kiva operation from one end of the building to another, the engineers simply placed bar codes on the hallway leading from the old to the new site and told the robots to do the rest.
A Kiva warehouse, D’Andrea adds, can also self-organize. The computer cluster tracks high- and low-selling products and stores them accordingly. It directs the robots to park racks that contain popular products near the pick-and-pack stations and place less popular ones at the back of the warehouse.
It’s fun to watch the robots, but the human workers filling the orders are also impressive: they watch for the laser dot, pick a product, scan its bar code, throw it into a box, and start over. The humans are rather robotic themselves. I ask D’Andrea: Why not automate this job too? Why not run a warehouse like a semiconductor fab, with everything untouched by human hands? He says that because products vary so much in size and shape and because of the way they sit on shelves, robotic manipulators still can’t beat real arms and hands.
“They factored what robots are good at compared to what people are good at, and they realized you don’t have to stop with one robot—you can have thousands of robots,” says Rodney Brooks, a professor of robotics at MIT and cofounder of iRobot, the maker of the Roomba vacuum cleaner. “These guys are really farseeing in bringing all those mind jumps together at once.”
Robots are not new to warehouses. Traditional material-handling vendors, as well as a handful of start-ups, offer self-driven forklifts, pallet-manipulator arms, automated storage-and-retrieval shelves, and other systems. Why has it taken so long for robots like Kiva’s to appear?
“Technologically, there’s no reason why Kiva couldn’t have happened 10 or 15 years ago,” says Scott Friedman, CEO of Seegrid, a start-up in Pittsburgh that developed pallet-carrying robots guided by an advanced vision system. “However, labor costs and labor scarcity have made it more appealing to put together some old tech in a new way now.”
D’Andrea disagrees. “If that was the case, Kiva would have been invented a long time ago in Europe, where labor costs are normally much higher.” More important, he adds, was the emergence of powerful but inexpensive electronics—wireless systems, guidance sensors, embedded processors—and the recent development of novel algorithms in the fields of multiagent systems and control theory. “To architect the whole system,” he says, “it took us many, many late nights.”
Kiva’s technology began in early 2002 as a bunch of diagrams and queuing-theory equations on a dry-erase board at Mountz’s one-bedroom apartment in Palo Alto, Calif. Mountz stood for hours in front of that board, looking for new ways of speeding up the pick-and-pack queues of warehouse operations.
His obsession grew out of his experience at the Internet grocery store Webvan. Despite its adoption of the latest warehouse technologies, Webvan’s cost of fulfilling orders ran three times as high as what the business plan had estimated. In 2001, the company became an infamous casualty of the dot-com bust.
“I thought, let’s start fresh,” Mountz recalls. “How could any item in an inventory become available to anybody in the warehouse at any time?” The answer, he figured, was that items had to “walk and talk on their own.” But how to do that?
He brainstormed the possibilities. If labor were really cheap, he could pack a warehouse with, say, 5000 people, each holding one object. “I’d shout, ‘Toothpaste!’ and a person would bring it to me,” he recalls thinking one day. Another possibility, suggested by a friend, was transforming the warehouse into a gigantic air-hockey table and have products gliding around the place. Those ideas were clearly too far-out, but they helped Mountz zero in on a promising concept: motorized trays to ferry products throughout the warehouse. What he needed, he finally realized, were mobile robots—lots of them.
Before building any prototypes, Mountz called up Peter Wurman, an old MIT roommate then at North Carolina State University, to find out what kind of software would be able to orchestrate so many robots. He flew several times to Wurman’s home in North Carolina, where they’d retreat to Wurman’s office in the attic. “We’d spend the weekend scribbling ideas and drinking a lot of coffee,” Mountz says.
They eventually focused on the idea of a central computer that would wirelessly command all the robots in real time, so that the human operators would never stand idle. There was just one problem. A large warehouse would involve dozens of workers, hundreds of robots, and thousands of products. Finding the best way of organizing the inventory and mobilizing the robots would be really difficult. In fact, it’s a type of problem that mathematicians call NP-hard: solving it exactly is often impractical.
Mountz and Wurman came up with methods to cut corners. They won’t reveal all the details, but they offer some hints. Instead of relying on a single piece of software that centralizes all the decisions, they envisioned software agents that could run on the central computer, on the robots, and on PCs at the picking stations. The agents would exchange information but act independently, each trying to optimize its own tasks. They also adopted heuristic methods, like greedy algorithms that can make good—but not always the best—decisions to perform tasks such as assigning racks to stations.
Mountz hired a contractor to prepare computer simulations of the system. The results stunned him. His robotic warehouse looked as if it could operate better than any real one. On 15 July 2002, he filed U.S. Patent No. 6950722, which described a “real-time parallel-processing order fulfillment and inventory management system.” It had a crude drawing of the robots, which looked like short trash cans on wheels. He called his business Distrobot Systems.
The robotic trays Mountz envisioned had their problems. For one thing, they would occupy too much space in a warehouse. They would also be too costly, because each would need its own motors, batteries, controllers, and communications module. To solve these issues, he decided that the trays could be stacked up to form shelves, and a handful of mobile robots could be used to move the shelf units around.
He began Googling, looking for projects involving mobile robots, and became fascinated with videos of RoboCup, the international robotic soccer championship. One day in the fall of 2003, he mentioned the videos to another MIT friend, Marjolein C.H. van der Meulen, now a professor of mechanical and aerospace engineering at Cornell, who promptly said, “You have to meet this RoboCup guy at Cornell!” The colleague in question was Raffaello D’Andrea, who had led the Cornell team to no less than four RoboCup world championships.
That year, D’Andrea had just begun a sabbatical at MIT, and Mountz arranged to meet him for half an hour on campus. They talked for three hours. They met the next day, and again the following weekend. D’Andrea was hooked. “Mine was probably the shortest-lived sabbatical of all time,” he quips.
In late 2003, Wurman and D’Andrea officially joined Distrobot. The company set up shop in a small warehouse in Burlington, Mass., not far from iRobot. In fact, they had chosen the Boston area because of the robotics expertise found there. The warehouse was just a big empty space, which they heated as little as possible to keep costs down. “It was so cold we kept our drinks in a little side room,” D’Andrea recalls.
The founders hired two engineers and one computer scientist and got to work. The first weeks consisted mostly of brainstorming. Progress was slow. One day, Mountz gathered everybody and said, “Stop doing stuff on the whiteboard. You guys should do less thinking and more coding.” He wanted to see something actually doing something.
D’Andrea and Wurman, on the other hand, were wary of a rushed design that could lead to problems in the long term. “From this tension we arrived at an engineering philosophy that lasts to this day,” Wurman says. “We do rapid prototyping and demonstrations, and then a cycle of deep thinking and major improvements.”
To build the first prototypes, Mountz hired some of his MIT fraternity brothers who worked in robotics. The initial models were metal boxes on wheels, the kind used in motorized wheelchairs. They had no navigation system and no collision-detection capability. The machines could move only from one point to another and often sent boxes flying off racks.
D’Andrea and his team set out to redesign the robots entirely. They modified the rack-lifting mechanism, optimized the wireless module, added safety and power-management features, and most important, came up with a totally new navigation and control system.
Their innovation was to put bar-code stickers on the floor and equip the robots with cameras to read them. As the robots move, they read the encoded information to learn their coordinates in the warehouse. At the same time, the robots’ control systems determine how far off their bodies are from the center of the stickers. If, for instance, a robot is a bit off to the right, the control system nudges it to the left.
The control system also reports its readings to the computer cluster to share that information with other robots. This distributed-control approach improves their navigation capabilities. Say a robot sees certain stickers off to the left. Instead of simply correcting its course by turning to the right, the robot first checks what other robots see—what the “wisdom of the crowd” is. If most of them see centered stickers, the robot figures that the stickers are in the right place and that the shift in position is due to inherent imperfections with its own hardware—its camera may be off center or its wheels misaligned. The robot then adjusts its own control parameters to navigate more accurately. In fact, the machines drive so meticulously that their rubber wheels leave precisely aligned tracks on the warehouse floor.
The greatest advantage of this approach is that the robots are mechanically simpler, and therefore cheaper. Rather than equipping the robots with expensive, high-precision parts to ensure they drive in straight lines, Kiva lets the control software take care of the variations and imperfections in the hardware components. “We don’t have to buy the best motors, the best gear boxes to make the robots reliable,” says Dennis Polic, one of the electrical engineers. “The control system takes care of that.”
 Weight Lifting: Kiva’s standard robot can lift 454 kilograms; its bigger model can hold three times as much, or 1362 kg.Photo: Joshua Dalsimer
Weight Lifting: Kiva’s standard robot can lift 454 kilograms; its bigger model can hold three times as much, or 1362 kg.Photo: Joshua Dalsimer
The control system also takes care of another nagging issue: keeping the rack stable while the robot lifts it off the ground. This is necessary because the lifting mechanism consists of a ball screw that rotates to raise the rack above it. It’s an intricate piece of machinery—a threaded shaft 30.5 centimeters in diameter with a nut assembly filled with ball bearings, custom-machined from hard-anodized aluminum at an undisclosed shop in Massachusetts. One dc motor turns the screw, raising the rack about 5 cm into the air. To prevent the rack from rotating while the screw turns, the control system causes the robot to rotate in the opposite direction at the exact speed required to keep the rack motionless.
The current production model can lift 454 kilograms and travel at 1.3 meters per second. Kiva builds the machines at its warehouse. Assembly takes just a few hours. Then comes a series of tests. Designed to last 10 years, the robots must drive on a floor scattered with 1-cm-thick plywood squares while carrying half a ton of patio paving stones. “They bounce and rattle quite a bit,” says Brett Anderson, a senior mechanical engineer. “It’s like an off-road course.”
In other test protocols—designed more for fun than for technical reasons—the team aligned a dozen robots and made them oscillate like a sine wave while engineers “surfed” them. To evaluate a stronger robot capable of lifting three times as much weight, or 1362 kg, a dozen employees climbed on top of the robot as it went about its business. And during the holidays last year, a Kiva intern got two dozen robots to dance to the score of Tchaikovsky’s The Nutcracker.
Running the robots in real warehouses has shown Kiva how customers can push its system to the limit. One client posted a lower price for a product on its Web site by mistake, attracting hordes of shoppers—and sending the Kiva robots after the same few racks, which had to be replenished over and over. Another time, workers at a customer site started driving forklift trucks through a section restricted to the robots. Eventually, a robot was hit and nearly destroyed. As engineers, D’Andrea and his team expect such problems to crop up, he says. “More late nights, I guess.”
Kiva has evolved significantly since its first days. In 2005, it moved to its much larger home in Woburn. It also got rid of the Distrobot name—“People were thinking we’re building humanoids to carry boxes,” Mountz says—to become Kiva. That year, it also signed up its first customer, Staples, followed by Walgreens in 2007 and Zappos this year. The company now has 80 employees, a number expected to nearly double this year.
This past April, Kiva shipped its 1000th robot. It says several potential clients that want to remain anonymous are currently testing its system. D’Andrea is confident that more and more Kiva robots will make it into warehouses. “We’ve simulated huge warehouses with thousands of robots,” D’Andrea says. “I can just imagine 10 years from now—people will start writing papers about PDE [partial differential equation] fluid models of Kiva robots, just as it was done with highway traffic.”
And he adds that although Kiva is not about “cool robots,” he enjoys spending time with them. “To me, it’s just beautiful. It’s like a dance,” he says. “That’s really what motivates me. To be able to make something like this—it’s human achievement. It’s a look-what-we-can-do sort of thing.”


