The Conversation (0)

Photo: Dan Saelinger; Prop Stylist: Dominique Baynes
You’re sitting behind the wheel of your car, but instead of looking at the road, you’ve been staring at your phone, perhaps reading a new e-mail message or texting a friend. Suddenly, the driver in the car ahead of you slams on the brakes. Rather than becoming a victim of distracted driving, you feel a gentle deceleration as your car comes to a stop on its own, easily avoiding a collision. You might look up to see what the holdup is, but that’s the extent of your concern. And your car starts itself up again as soon as the road is clear.
While this isn’t a realistic portrayal of your commute just yet, this future is coming—and some of the technology that will make it possible is already present in today’s cars. The more advanced models can warn of obstacles, adjust the distance to a car ahead, and activate the brakes when a distracted driver doesn’t. And this is just the beginning. According to research firm IHS, by 2055 roughly 90 percent of the cars in the United States will be able to drive themselves in some, if not most, circumstances.
Ironically, while technology will ultimately protect us from accidents on the road, sometimes it does the opposite. That’s because so many people make phone calls, text, manipulate GPS units, and fiddle with infotainment systems when they should be concentrating on their driving. And even the most diligent drivers can choose the wrong moment to glance at a navigation screen. According to the National Highway Traffic Safety Administration, driver distraction is a factor in almost 20 percent of crashes in which someone is injured.
But a class of technological aids called active-safety systems is beginning to address this problem by raising drivers’ awareness of crash threats that may exist in the surrounding traffic. Virtually every car sold in developed countries today uses passive-safety features, like seat belts, air bags, and car frames that absorb impact to protect occupants during a crash. Active safety goes further by using loud sounds, visual alerts, and vibrations to direct the driver’s attention to imminent danger. Some systems can even operate the brakes to help avert disaster. These active-safety systems are the building blocks for the crash-avoiding cars of the future.
Consider Cadillac’s Driver Assist package, which our company (General Motors) introduced in 2012. This group of safety systems detects road hazards and draws your attention to them. It adjusts your speed and the distance from the car or truck in front of you based on levels you set, and it can even bring you to a full stop when the vehicle ahead does the same. It also helps when you’re backing out of a parking spot, using visual alerts, sounds, and seat vibrations to warn of approaching cross traffic. The system sets off similar alarms if you start drifting out of a lane without the turn signal activated.
A car equipped with this package can avoid many low-speed crashes, such as those in parking lots or in stop-and-go traffic, with a low-speed emergency automatic braking system that kicks in when it senses an object ahead and notices that the driver is not reacting appropriately. And at higher speeds, this same system automatically brakes to help avoid—or at least reduce the severity of—an impending rear-ender.
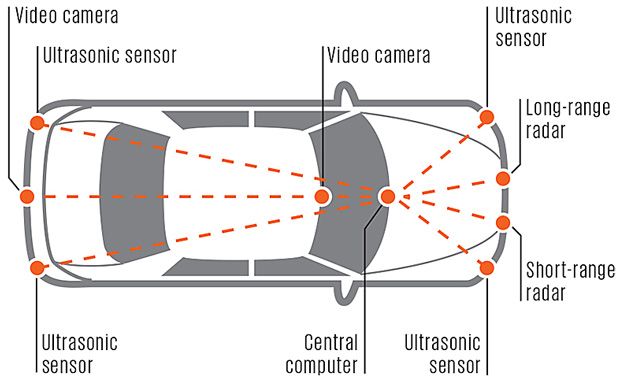
Smarts like these require some high-tech sensors. A long-range radar, positioned in the grille behind the Cadillac logo, scans for objects as far ahead as 150 meters. Short-range radars, which can sense cars a few dozen meters away, hide behind the plastic that covers the bumpers—two radars in the front and three in the rear. A video camera attached to the windshield behind the rearview mirror registers lane markings and vehicles ahead. Another camera near the rear license plate surveys the scene behind the car. Eight ultrasonic sensors, four on the front bumper and four on the rear, detect objects at very close range, which is helpful when you’re trying to parallel park.
The data from all these sensors go to a central computer, which uses the information to figure out what kinds of objects are around the car, recognizing that in certain situations some sensors are more reliable than others. For example, when you’re traveling at highway speeds, the readings from the ultrasonic sensors aren’t helpful, whereas they are nearly essential when you’re navigating your car into a tight parking space. The central computer then decides what kind of alert needs to be activated or what level of automatic braking needs to be applied.
These active-safety systems are enormously helpful, but they aren’t enough to make a car truly crash proof or able to take over the driving. They can’t grab the wheel from you and take evasive action when braking alone won’t do, for example, and they can’t stop you from steering out of your lane into danger if you ignore all the alerts.
While fully autonomous vehicles are a ways off yet, we believe cars that can pilot themselves briefly under certain conditions should be in showrooms before the end of the decade.
Actually, self-driving vehicles are already here, although you can’t yet buy one at your local dealer. In November 2007, a Chevrolet Tahoe modified by researchers at Carnegie Mellon University and GM along with other partners won the Defense Advanced Research Projects Agency (DARPA) Urban Challenge, a closed-course competition that tested the ability of autonomous cars to drive in traffic. Since then, companies and universities have built upon the technology showcased in the challenge. Google, for example, has a fleet of driverless Toyota Priuses, which have reportedly traveled an aggregate of 500 000 kilometers.
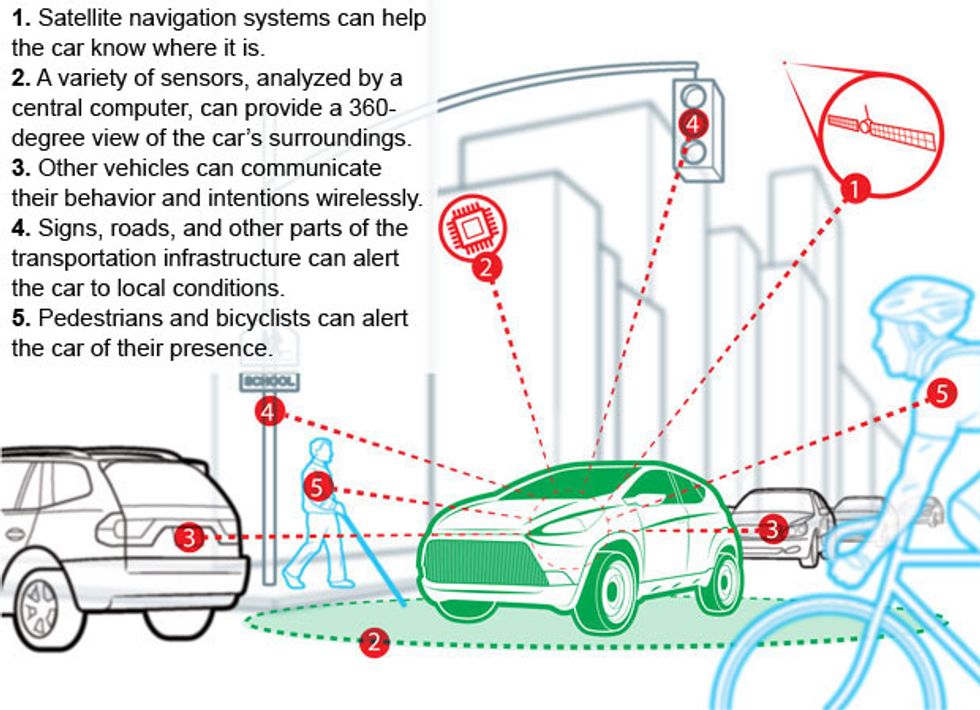
To drive itself, a car requires four basic things. It needs a satellite-navigation system and digital maps to know where it is. It needs to be able to see 360 degrees around itself under all sorts of conditions. It needs to be able to communicate with other vehicles and with certain parts of the road infrastructure, like traffic lights, school zones, and tollbooths. Finally, it needs software intelligent enough to determine what the car should do and electronic controls and actuators to make the car do it. All these technologies exist on some level today, and many of them are already on vehicles, as in Cadillac’s Driver Assist package. But these systems need to be more capable before they usher in the era of fully self-driving cars.
Satellite navigation and digital maps are old news: GM incorporated GPS, digital maps, and wireless communications into its OnStar system more than 17 years ago. Add-on GPS systems from Garmin, TomTom, and others have been around for years, and today people consult digital maps on smartphones even when walking down the street. For the most part, the basic “Where am I?” part of the equation is solved, at least in the United States and most other developed countries, although fully self-driving cars will require greater precision.
To have a 360-degree sensing capability, self-driving cars will need a combination of cameras, radar, lidar, or perhaps other sensors, because each has its strengths and weaknesses. Cameras require visible light—a weakness—but they can readily be used to identify objects. Radar and lidar can send signals in the dark but are more limited in determining shapes around them; they do better than cameras at gauging relative velocity and estimating distance, however. Lidar can give a more detailed look in a focused direction, whereas radar provides broader coverage.
Communicating with other vehicles and the road infrastructure will also be immensely important, adding capabilities beyond those of today’s drivers. For example, if you’re an attentive driver, you immediately notice when the brake lights illuminate on the car ahead, but typically you don’t know whether the driver of a vehicle two or three cars ahead applied the brakes. Wireless communications systems could soon change that.
This area is a hotbed of development right now. Automakers are working on technologies for both vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) communication. Both use a special form of Wi-Fi called Dedicated Short-Range Communications, which operates on a band near 5.9 gigahertz. V2V communication allows similarly equipped vehicles within a few hundred meters of each other to trade information about location, speed, and direction of travel. V2I communication can share information about traffic-signal timing, the number of lanes a highway has, whether a curve is coming up, surface conditions, and so forth, when such data are available.
GM pioneered V2V technology eight years ago and has demonstrated many V2V and V2I features using real vehicles. Nine U.S. car companies, in an effort led by the U.S. Department of Transportation (USDOT), have been working for several years as part of a research consortium, the Crash Avoidance Metrics Partnership, to develop standard communications protocols and security mechanisms for this technology. Automakers have started a similar project in Europe: the Car-2-Car Communication Consortium.
To help understand the safety benefit of V2V technologies, the USDOT and a team of public agencies, universities, and major auto manufacturers began a pilot program in Ann Arbor, Mich., in August 2012 and are still collecting data. The test involves about 3000 cars, trucks, and transit vehicles equipped with communications devices. The group also used V2I, equipping some parts of the infrastructure to communicate with the fleet, such as traffic signals at busy intersections, road edges along sharp curves, and several spots along highways. This combination of technologies is known as V2X. Similar collaborative programs have been under way in Japan, led by the Japanese government in cooperation with several of that nation’s auto companies.
Of course, having V2X communications on your car doesn’t help you much unless other vehicles and parts of the road infrastructure are able to talk back. So this technology will need to spread over time. And as it is built into more and more vehicles, the benefits will grow.
In February, U.S. Secretary of Transportation Anthony Foxx attempted to shift the V2V rollout into high gear with an announcement that the USDOT would, before President Obama leaves office, develop a proposal to require V2V communications on all new vehicles. There’s no word on exactly when that requirement will kick in, but just knowing it’s coming is likely to speed adoption of the technology.
The infrastructure piece will take longer to evolve, but with cars on the road having communication abilities, it will make sense for local and regional governments to update equipment when they replace various bits of road infrastructure, like traffic lights and in-road sensors, so V2I will also grow gradually.
And your car may soon be communicating with pedestrians as well. In 2009, GM demonstrated a V2X capability that can alert drivers to pedestrians and cyclists. It relies on Wi-Fi Direct, the peer-to-peer wireless standard that allows devices like smartphones to communicate directly with one another rather than through a shared access point. An app on a pedestrian’s phone would transmit location information using Wi-Fi Direct, and a receiver in a nearby vehicle would note the signal and send an alert to the driver—for example, by flashing a light on the dashboard.
V2V systems will, of course, have to be extremely robust to ensure that the messages traded are accurate. Investigators involved with the Ann Arbor test of V2V systems are currently evaluating the quality of the messages sent and received under various conditions. Intervehicle signaling is, fortunately, easier than using traditional cellular or Wi-Fi communications, because the messages need only be exchanged when vehicles are close together, and the vehicles talk directly to one another rather than through an external wireless network.
In discussing the future of V2V communications, transportation secretary Foxx made it clear that while vehicles will be broadcasting their locations and speeds, they will not identify their owners. Regulators will also need to make it clear how the information will be used. Part of the remaining technical work is to define a security system that will ensure that no malefactors can access the messages and that this information can be used only for its intended purpose.
Although automated-driving technologies have only recently started making the news, cars have actually been intervening in the driving process in limited ways for some time. One of the earliest examples was electronic stability control: systems that incorporate antilock brakes, traction control, and differential braking to apply the necessary brake pressures at each wheel automatically, thus helping a driver maintain steering control during a skid. Similarly, today’s electronic power-steering systems, which use inputs from steering, speed, and other sensors, help prevent drivers from overcorrecting in skids. Such technologies are common on vehicles today.
Coming soon is lane-following technology, which is one component of automated highway driving. This equipment mainly relies on cameras to detect lane markings but can also use GPS data to anticipate upcoming curves and other road characteristics. But even the best such systems face certain operational limitations. For example, when snow or poor visibility obscures lane markings, the driver will still need to steer manually.
 Photo: Dan Saelinger; Prop Stylist: Dominique Baynes
Photo: Dan Saelinger; Prop Stylist: Dominique Baynes
Lane following will be the centerpiece of the first systems capable of maintaining speed and lane position under certain highway driving conditions. GM calls the concept Super Cruise, having first demonstrated it in 2012, and other car companies have since demonstrated similar technology. Super Cruise works on freeways in both bumper-to-bumper traffic and on long road trips in light traffic. It works well in either situation, but the driver must still pay attention to the road and be ready to take over in an instant.
The next frontier will be more-complicated driving conditions. Staying centered in a lane on a highway, for example, is much less demanding than staying centered on a road in a crowded city, where markings can be less visible to begin with, if they exist at all, and other vehicles may block a camera’s view of road markings. So in urban settings, a car will likely have to rely on additional sensors and approaches. Urban driving gets even more complex when the movement of cars, motorcycles, bicyclists, pedestrians, and trains are considered. So it will take longer to develop the sensing systems and software needed to automate driving in these more-challenging situations.
Not only will automated driving systems have to manage the ever-changing conditions around the car, they will also have to monitor the health of all the various controls, sensors, and processors within the vehicle. This will add considerable complexity, especially if the software involved includes algorithms that attempt to identify impending failures. And like all computerized systems that handle important information, automated driving systems will have to be protected from hackers, to prevent an unauthorized command of a vehicle’s control systems, such as braking and steering.
Regulators are of course interested in the safety benefits these technologies can provide, but they must also minimize the risks of unproved technologies. So they will move cautiously. The recent announcement of the upcoming mandate for V2V communications is an important step forward, at least for the United States.
We look forward to similar moves elsewhere in the world. As they happen, harmonizing standards will become a significant issue. Although auto manufacturing is global, standards affecting the industry are often local. Radar frequencies allocated for public use often vary by country, for example. Countries could also differ in the communications protocols they select for use in V2V systems or in performance standards for collision-warning systems. None of these obstacles is insurmountable, but adopting standardized approaches for things like radars, digital maps, markings, and roadway signs and markers should speed the deployment of active-safety and automated-driving technologies around the world.
While many of us just long for the day we can surf the Internet on our commutes to work, the automation of the passenger automobile stands to benefit drivers who are older or disabled in more significant ways.
And for every driver, active-safety systems and automated-driving tech will provide not only assistance and support but also the valuable gift of time—time to reach for something in the glove compartment, to turn around and fix a child’s jacket, to put on makeup, or to chat on the phone. Drivers are already doing these things, but in the future they could do them without being a hazard to themselves or others.
But until these technologies evolve into fully fledged robotic chauffeurs, the automated systems will need to be able to communicate clearly to the driver about when they are—and are not—capable of handling the vehicle. And when they are not, they must alert the driver with plenty of time to take over. Much research will be required to understand the safe limits of automated-driving systems and how to manage them.
As the auto industry works to develop and implement these automated technologies, it has an opportunity to completely reinvent the automobile. When cars no longer really crash, their frames—designed now to protect occupants during a collision—could be built lighter, making the vehicle more efficient. If automated systems fully replace the driver, the entire cockpit design could be reimagined to provide greater comfort. Thanks to automated systems, the cars of 2100 may look nothing like the cars of the past 100 years.
This article originally appeared in print as “The Rise of the Crash-Proof Car.”
About the Author
John Capp and Bakhtiar Litkouhi are both with General Motors Research and Development. Capp is director of electrical- and control-systems research and strategic lead for automated driving technologies. Litkouhi runs research on vehicle control systems and is also program manager of the GM–Carnegie Mellon University Autonomous Driving Collaborative Research Lab. A childhood fan of the futuristic TV cartoon “The Jetsons,” Capp marvels at how much progress has been made toward creating the kind of vehicle the show’s George Jetson would recognize.


