The Conversation (0)

Illustration: Blood Bros.
While robots are becoming more diverse and capable, there’s one component that hasn’t changed much in the past half century: their actuators.
A vast majority of robots use an electric motor coupled to a gearbox to move each of their wheels and joints. The motor spins rapidly, as it’s optimized to do, while the gearbox reduces the rotation speed of the output shaft, increasing the torque in the process. This type of actuator powers robots as varied as industrial arms, walking humanoids, and Mars rovers. But it’s far from perfect: Gear motors are often bulky and sluggish. They can’t handle impacts and are maintenance heavy. And if you need a lot of torque, be prepared to pay a steep price. Roboticists have long hoped to find better alternatives.
Now a Canadian startup says there’s indeed a better way to actuate robots. Genesis Robotics in Langley, B.C., wants to replace regular motors with a special kind of motor whose torque and speed can be controlled more precisely. Because such a motor can turn at a much slower pace, you can sometimes use it to power a robot joint using no gearing at all, which is why the design is known as a direct drive, even though in many cases these motors are coupled with minimal gearing.
Direct drives represent a decades-old technology, and you can find them in industrial equipment as well as consumer products. But Genesis claims that its LiveDrive design can deliver three times as much torque as conventional direct drives of the same weight, is 100 times as precise, and costs much less. The company has also invented a compact, lightweight gearbox, called Reflex, that can be made out of injection-molded plastic, reducing fabrication costs. In contrast, most high-performance actuators use strain-wave gears, which are particularly expensive because they must be machined to high tolerances.
“Robotics is so far forward with the controls, with the sensors, with the AI,” says Genesis founder and chief technology officer James Klassen. “What’s holding it back is actuation.”
The 60-person company has been amassing patents over the past several years, and last April it received a large investment from Koch Industries, the giant conglomerate based in Wichita, Kan. Starting in 2019, Genesis will either sell or license its family of direct drives and gearboxes to robot makers.
In their structure, direct drives aren’t that different from brushless DC motors, consisting of a rotor fitted with permanent magnets and a stator with copper windings. But while DC motors typically have fewer than a dozen magnets and windings, direct drives have several times as many.
One advantage direct drives have over gear motors is that you can control their torque more accurately by adjusting the winding current, without expensive force sensors. Direct drives also have very low inertia, so they can accelerate extremely fast and even stop or reverse direction nearly instantaneously. And with no backlash—the slack in teeth couplings that causes motion loss in gear motors—direct drives are also very precise.
So why aren’t they widely used in robotics?
Sangbae Kim, director of MIT’s Biomimetic Robotics Lab, says roboticists have been exploring this type of actuation since at least the 1980s. It’s already used in high-speed arms and haptic devices, and a number of suppliers do offer direct drives for robot applications. The challenge, he explains, is that these motors are rather big. You can make them in compact sizes, he adds, “but the torque density will drop.” In other words, the motors might fit nicely into your robot, but they won’t be powerful enough to make it move. Another downside is that direct drives generate a lot of heat, which means you need to add fans or even water-cooling systems to your design.
Genesis says it addressed these problems by simplifying the geometry of the rotor and stator to reduce the number of parts and integrate them as tightly as possible. Klassen says his team shrunk the size of the magnets, which sit only millimeters apart, while the windings, too, are closely embedded into the armature. The structure is able to withstand the amplified magnetic forces within the motor while still allowing for heat to dissipate efficiently.
“It’s got the strength, it’s easily manufactured, and it’s very inexpensive,” he says.
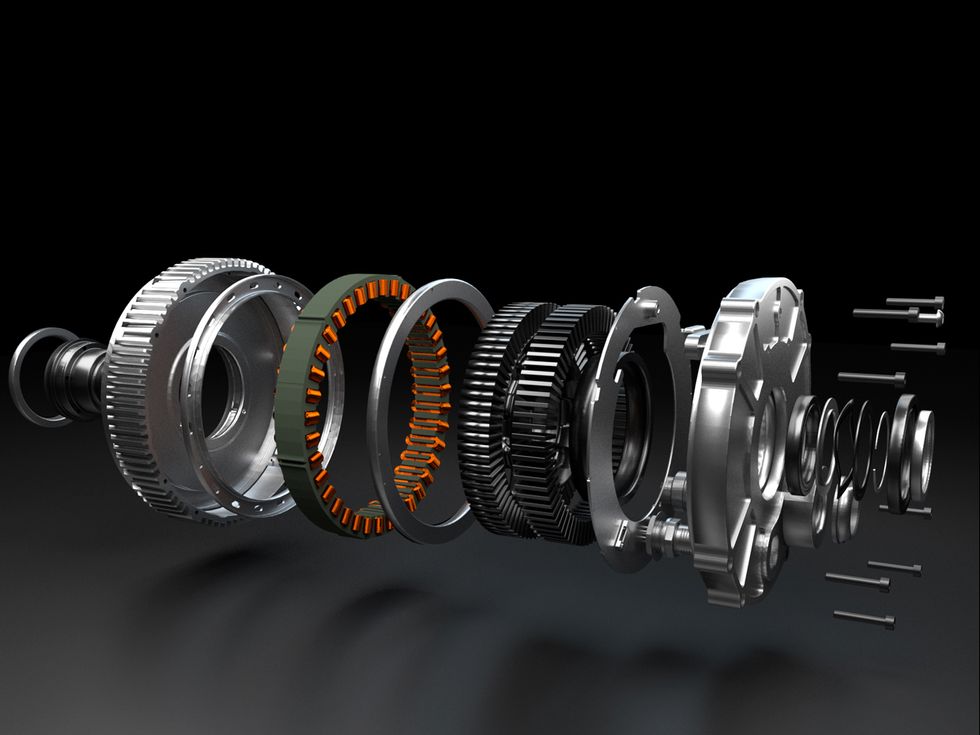 Magnetic Muscles: Genesis Robotics has designed a direct drive that integrates magnets and windings tightly in a compact package. The company says its LiveDrive motor can deliver three times as much torque per weight as conventional direct drives.Illustration: Genesis Robotics
Magnetic Muscles: Genesis Robotics has designed a direct drive that integrates magnets and windings tightly in a compact package. The company says its LiveDrive motor can deliver three times as much torque per weight as conventional direct drives.Illustration: Genesis Robotics
The company has designed two LiveDrive models, one 250 millimeters in diameter and another 110 mm. Public demonstrations at trade shows have generally impressed observers, and Genesis is now collaborating with researchers to improve its motor specs.
“The diameter is a bit big, but on the other hand, the width is very impressive,” says Bram Vanderborght, a roboticist at the Vrije Universiteit Brussel, in Belgium, who’s an advisor to the company and has been testing the 250-mm LiveDrive. One possibility he’s considering is putting two or more LiveDrive units side by side to multiply the torque. “It’s a more modular system,” he says.
Most robots will require more torque than LiveDrive alone can provide. That’s why Genesis created its Reflex gearbox. It’s based on a configuration of planetary gears, with smaller gears revolving around a larger one. This design results in a more compliant, responsive actuator compared with those used in multistage gearing systems. Reflex will initially be made out of metal, but the goal is to fabricate it using plastics, bringing down the cost to a fraction of that of existing strain-wave gears, which is a major reason why robotics hardware is so expensive.
For his part, Klassen says the best way to show off the benefits of his actuators is by putting them to use in real robots. His team has designed robotic arms, legged robots, and exoskeletons and is now building a home robot prototype. “We love to build things, make things better,” he says. “We’re a bunch of gearheads.”
From Your Site Articles
{"imageShortcodeIds":[]}


