
Two teams of boxy, wheeled robots face off against each other. A whistle blows and they spring into action, jostling for possession of a brightly colored golf ball on a playing field the size of a Ping-Pong table. Each team struggles to push the ball into the other team's goal located at the opposite end of the table. The robots move fluidly and quickly, constantly adjusting to the run of play in a surprisingly lifelike way. Their anxious builders look on, unable to help because their offspring are completely autonomous.
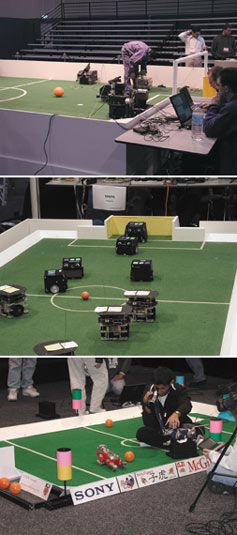
This is robosoccer, the latest experiment in robotics, and one that is growing in popularity on college campuses around the world. A number of local and international tournaments have sprung up so that different teams may compete. The largest is the annual RoboCup tournament. Held last year in Melbourne, Australia, it attracted more than 70 entries for its four leagues [see photographs]. This year's competition, to be held in August in Seattle, Wash., drew over 140 entries and registration is still open. Participants range from professional researchers to undergraduates.
Manuela Veloso, an associate professor of computer science at Carnegie Mellon University, in Pittsburgh, is this year's organizing chair for the competition. She explained a qualifying process has had to be introduced to whittle down the entries, "because we don't have the time or space for all the teams to play."
Additionally, a junior league for 8-to-18-year-olds is operated by the RoboCup organizers. In Melbourne over 200 children participated, with about as many expected in Seattle.
Why has robosoccer caught on with so many people from all around the world? In previous robotic challenges, the mobile machines were pitted against a neutral environment, such as the mazes that were once a staple of robotics and artificial intelligence (AI) researchers. In contrast, robosoccer's competitive aspect ensures that participants "really get involved, because you're not defeating a static maze, but facing another team," said Veloso. Certainly the cheering spectators that crowd around most RoboCup matches display more passion than is usually witnessed at robotics conferences.
Meanwhile, researchers take to robosoccer because of the new angle of attack it provides on a broad range of topics. Vision systems are required to see the field, ball, and players. Mechanical and electrical systems must be versatile and robust. Control systems must be able to respond precisely to commands, and AI is deployed to coordinate the robots and execute (hopefully) scoring plays. Moreover, all this must happen in real time. Robosoccer also places a premium on the ability of robots to work together in groups. Before robosoccer, research in this area was based on "a single robot going down volcanoes or into space," said Veloso, but "robosoccer has been a very concrete test bed for research in really top-notch multirobot problems."
This research points toward the type of use that robosoccer findings will enable in the real world: any system where multiple agents have to locate themselves and cooperate--disaster rescue, construction, and space exploration--is an example, said Veloso.
To encourage disaster applications, a RoboRescue league has been added to the RoboCup competition. "Robots have to identify where wounded dummies are in a disaster scenario," explained Veloso. Simulated scenarios are used, where a central server creates a virtual disaster environment and programs connect to the server and control agents in the simulation. The organizers have also created a mockup of "a real disaster. It has debris and different floors that robots have to [navigate]," she said. Any type of robot design is allowed, and several teams have already signed up, including participants from the U.S. Naval Research Laboratory, headquartered in Washington D.C.
The ambition of the RoboCup organizers is to develop a team of fully autonomous humanoid robots that can defeat the human world soccer champions by the year 2050. So far, wheeled robots predominate. They kick the ball either by rolling into it or using specialized dribbling or kicking mechanisms very unlike human motion in controlling the ball.
Leagues of their own
Currently, the Robocup competition is divided into four leagues with simplified objectives and rules, with each league trying to include various aspects of real soccer. First is a simulation league, in which a central server simulates a playing field and the game, similar to the disaster scenario simulator. Opponents are autonomous software programs that control players in the simulation. The simulation is detailed and strives for realism, including such factors as the stamina and limited fields of vision of human players.
Second is a small-robot league. Teams of five robots move on wheels or tracks and each robot must fit into an 18-cm-diameter cylinder and be 15 cm tall at most. The playing field is the size of a Ping-Pong table and the ball is an orange golf ball, as noted earlier. Each team mounts a camera above the center of the field for a global view of the positions of the players and the ball, as well as the goals and the boundaries of the field. The video from the camera is processed by the team's off-field computer, which controls individual robots by radio links. Once the game begins, human participants must allow the computer to play without assistance. "The system is all hands off, nobody controls it," said Veloso.
The third, medium-robot, league features larger robots that are also wheeled or tracked. They play four-on-four on a field the size of nine Ping-Pong tables with a standard-size soccer ball. "They can have radio communication between teammates, but they cannot be remotely controlled by computer," explained Veloso. Each robot carries its own vision and processing system and a big challenge for these robots is one of localization--figuring out where they are in relation to the field, the ball, and the other players.
The final league features four-legged robots, special versions of Sony Corp.'s Aibo robotic dogs. "Sony released a version that we can program...they are very important because they allow us to work on the motion that will eventually lead us to the humanoid bipeds that we want to build," Veloso said. Sony plans to use this research to help it develop new generations of its popular toy.
Birth of a tournament
The RoboCup competition was founded in 1993 by Japanese researchers Minoru Asada, Yasuo Kuniyoshi, and Hiroaki Kitano, in the wake of a workshop on AI that was looking for ways to stimulate progress in the field. They chose soccer as a model problem, adopting a proposal made the year before by Alan Mackworth.
Mackworth is a professor in the department of computer science at the University of British Columbia in Canada. He explained he invented robosoccer because "the standard model of AI was breaking down." In that model, robots could perform tasks only in environments over which they had complete control, and the role of perception was limited to getting "the initial state of the world, and then everything else happened in the [computer's] head,'" recalled Mackworth.
robo04 To meet its objectives, a robot would plan a simple sequence of actions. For instance, to revise the order of a stack of blocks, it would assess the blocks' locations, then draw up a list of things to do, such as lifting the first block, putting it down beside the stack, lifting the second block, and so on. It could take as much time as it needed to make its initial visual assessment of the situation and formulate a plan. Coping with somebody walking into the room and pushing the stack over half way through the sequence was not part of the model. But animals and people get things done despite messy, unruly environments over which they exert far from complete control.
Hence robosoccer. Soccer is all about reaching goals amid a continually changing situation, and doing it in real time. In robosoccer, likewise, robots must continually take into account their environment, including their own location and orientation on the field, the location of the ball, and the positions of teammates and opposing players. They must be able to react quickly, but within an overall game plan.
Robosoccer forces designers to "pay attention to both sides if they want to build a successful soccer team," said Mackworth.
Hands-on learning
The richness of the robosoccer challenge has attracted a growing number of researchers and, significantly, students as well. Raffaello D'Andrea is an assistant professor of mechanical engineering at Cornell University in upstate New York and a robosoccer enthusiast. "There are two reasons why I've done this project. One is research, the other is education," he said.
D'Andrea is excited about the teamwork required. "It's not just mechanical design, it's not just electrical design or computer simulation, it's everything....I really wanted to expose students to that mix, I think it gives them a leg up when they go into the real world." A third each of D'Andrea's students are electrical engineers, computer scientists, and mechanical engineers.
The problem's scale also appealed to D'Andrea. Students can move from a paper study of robosoccer to a competitive team of actual robots in an academic year, "if you do it properly. Instead of just teaching students the process of systems engineering, they discover that if they don't use that process [they won't be able to compete]."
David Lugan, a student at San Diego State University in California, was bitten by the robosoccer bug when a sophomore in the electrical engineering department. Now a senior, he takes part in the small-robot league, organizing for it a robosoccer team sponsored by IEEE Spectrum. As a learning tool, robosoccer challenges "not only your skills in one particular area, but the whole integration of a functioning system," said Lugan, explaining why he got involved.
The realities of getting balky systems to work has been especially valuable. Troubleshooting robot problems means Lugan must use an "oscilloscope and voltmeter and test and probe to see if things are really working.... [In a simulated circuit] I can see what everything is doing and I can take out a resistor with a mouse click. With the robots, I have to get the soldering iron out," he noted.
A lot of fun
In April, Lugan and his team competed in a small-robot tournament at Brigham Young University, in Provo, Utah. Nine teams took part, playing one-on-one matches, with the robots alternating between offense and defense. Lugan's robot, named Trinity, came in only fifth, based on the total goals scored in the individual matches. But "we learned a significant amount and had a lot of fun," he said. He plans to enter the 2001 RoboCup and will also be a moderator of an on-line robosoccer discussion forum to be launched by IEEE Spectrum Online next month.
The forum will allow robosoccer developers to swap ideas and designs for hardware and software and to discuss events and related news. Graduate and undergraduate student teams will be able to apply for Spectrum sponsorship through the forum as well. More details will be available in June on IEEE Spectrum Online's home page at www.spectrum.ieee.org.
To Probe Further
To learn more about the RoboCup competition, including details of its rules and regulations, visit https://www.robocup.org