
The latest issue of the IEEE Robotics & Automation Magazine features a special report on open-source robotics hardware and its impact on the field. We’ve seen how, over the last several years, open source software—platforms like the Robot Operating System (ROS), Gazebo, and OpenCV, among others—has played a huge role in helping researchers and companies build robots better and faster. Can the same thing happen with robot hardware?
It’s already happening, says robotics researcher and RAM editor-in-chief Bram Vanderborght, who explains that building hardware has gotten much easier thanks to things like 3D printers, laser cutters, modular open electronics kits, and other rapid prototyping and fabrication techniques. And while “open-source robotics hardware is taking longer to catch on” compared to open-source robotics software, he notes that “several impressive examples exist, taking advantage of benefits of those novel rapid prototyping possibilities.”
Making robotics hardware more affordable, versatile, and “standardized” is hugely important for the field, as Aaron Dollar, Francesco Mondada, Alberto Rodriguez, and Giorgio Metta, who guest edited the special issue, explain:
In the field of robotics, there has existed a relatively large void in terms of the availability of adequate hardware, particularly for research applications. The few systems that have been appropriate for advanced applications have been extremely costly and not very durable. For those and other reasons, innovation in commercially available hardware is extremely slow, with a historically small market and expensive and slow development cycles. Effective open-source hardware that can be easily and inexpensively fabricated would not only substantially lower costs and increase accessibility to these systems, but would drastically improve innovation and customization of available hardware.
The report includes in-depth articles on seven major open-source robot hardware projects, which range from gripper mechanisms to haptic interfaces to complete standalone robots:
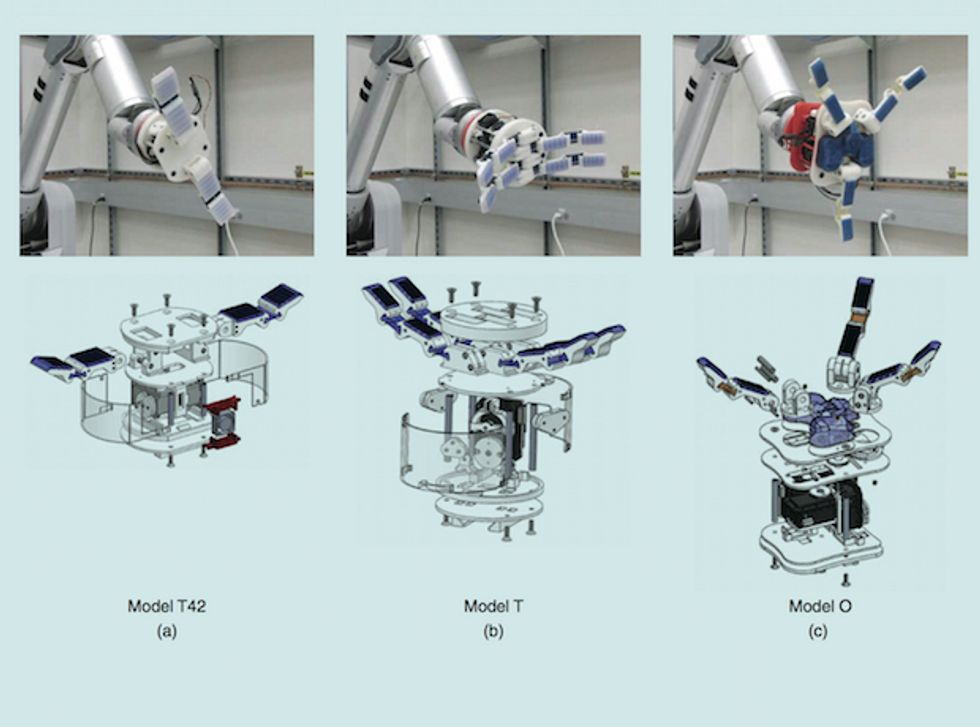
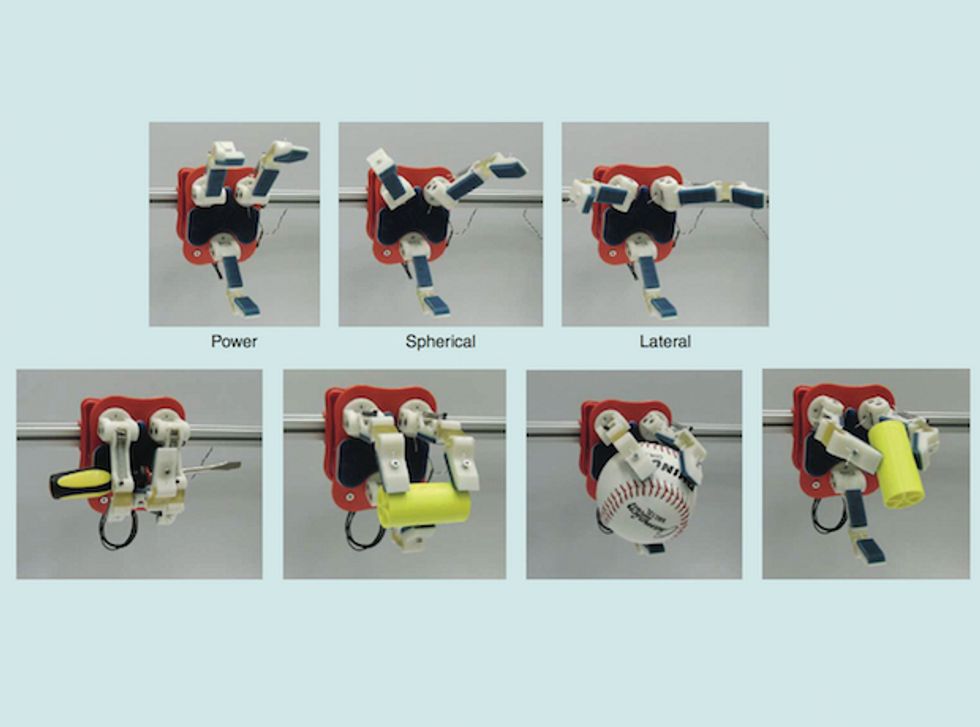
- Yale OpenHand Project
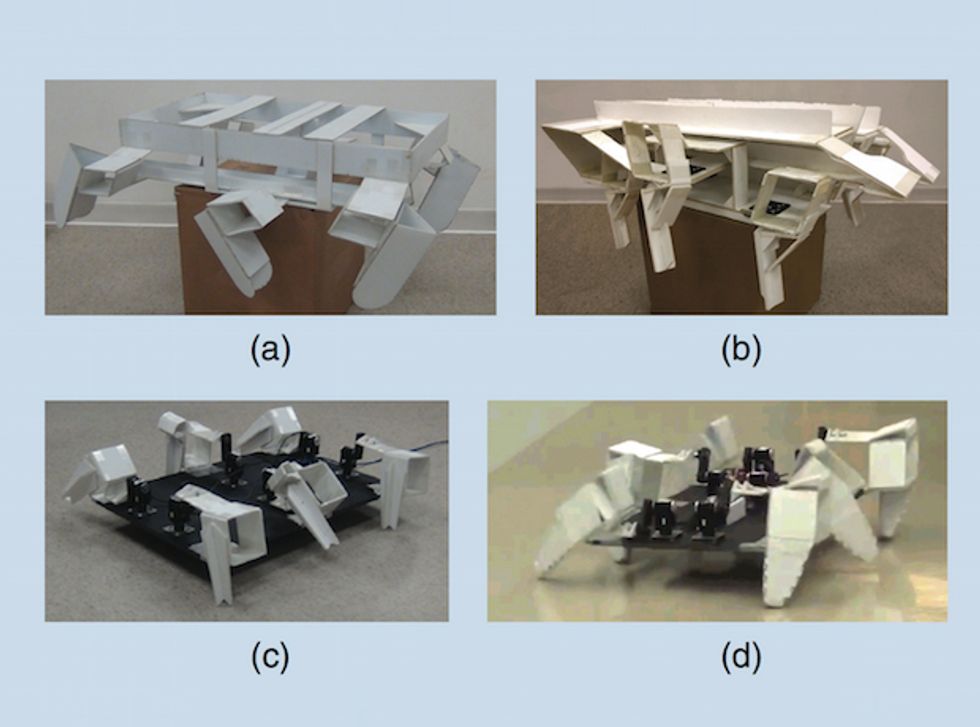
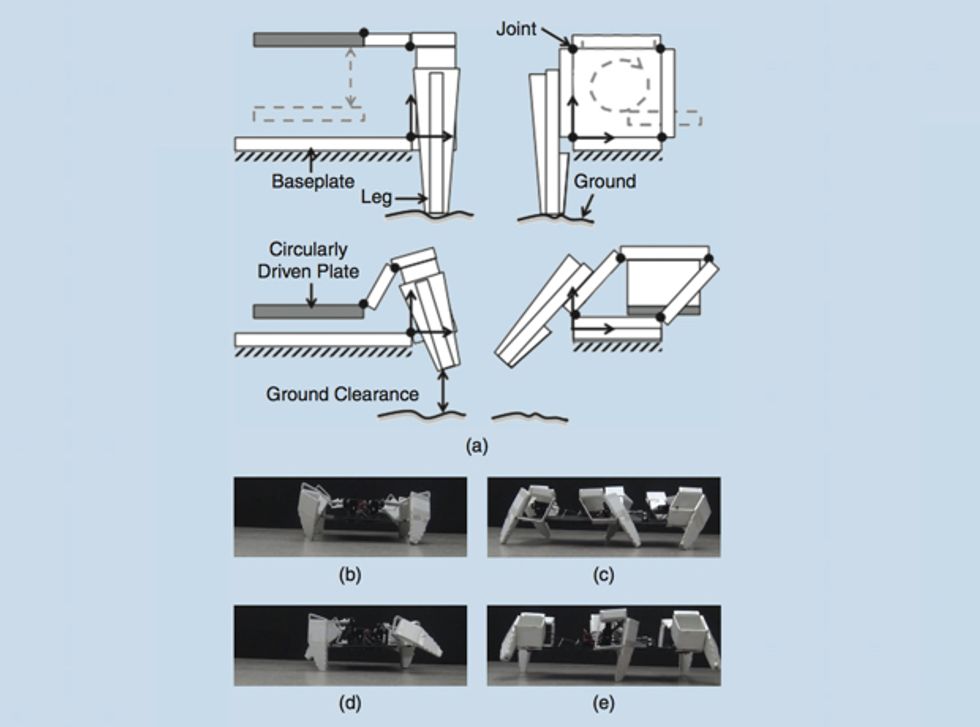
- BigANT
- Natural Machine Motion Initiative (NMMI)
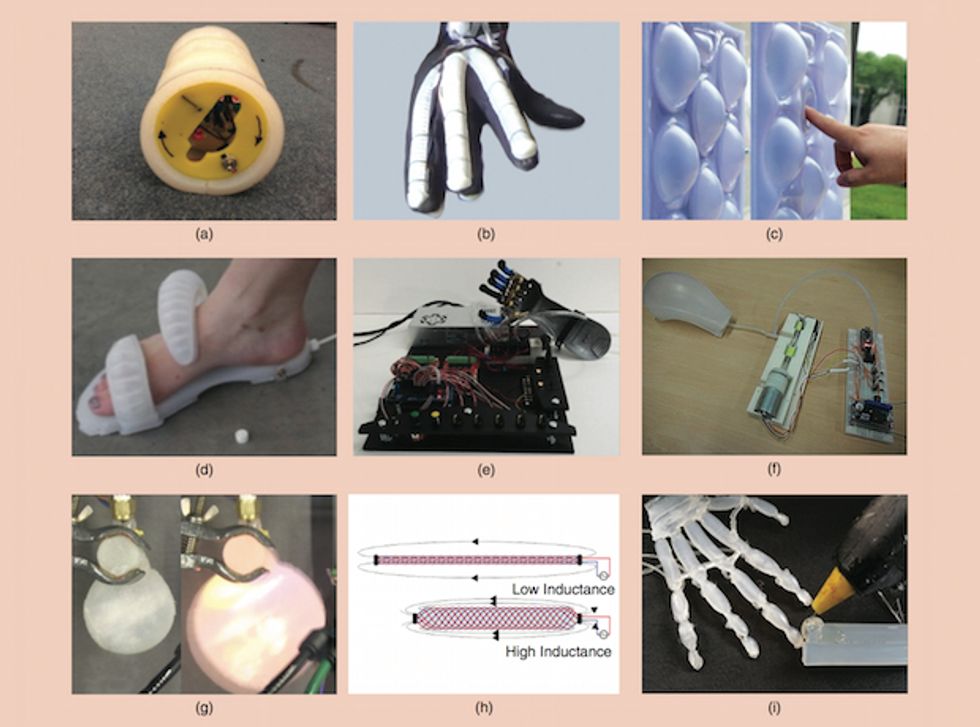
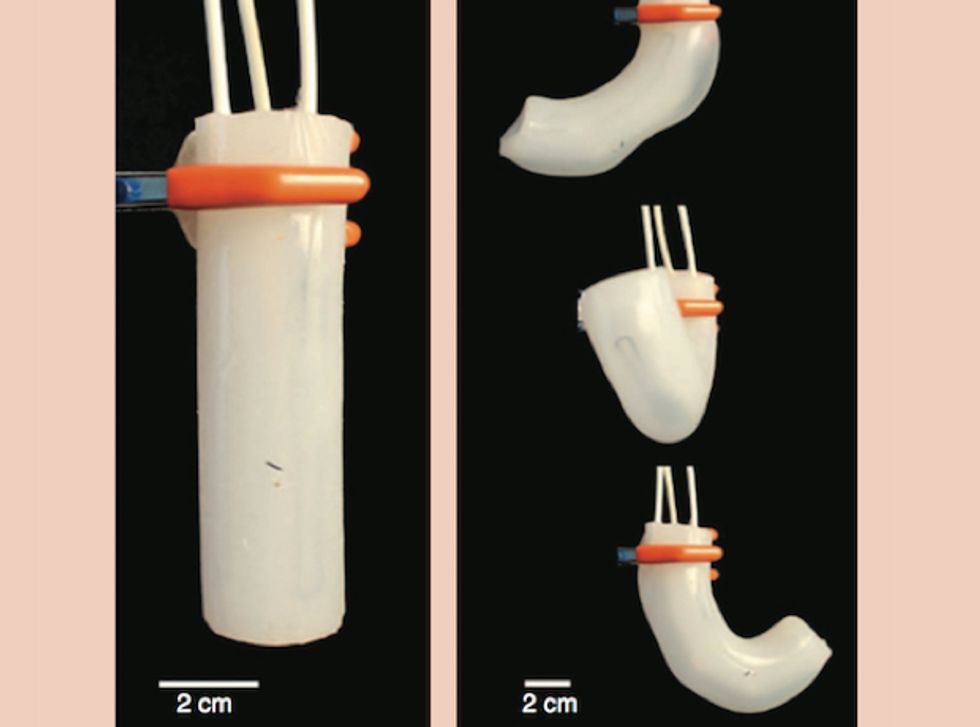
- Soft Robotics Toolkit
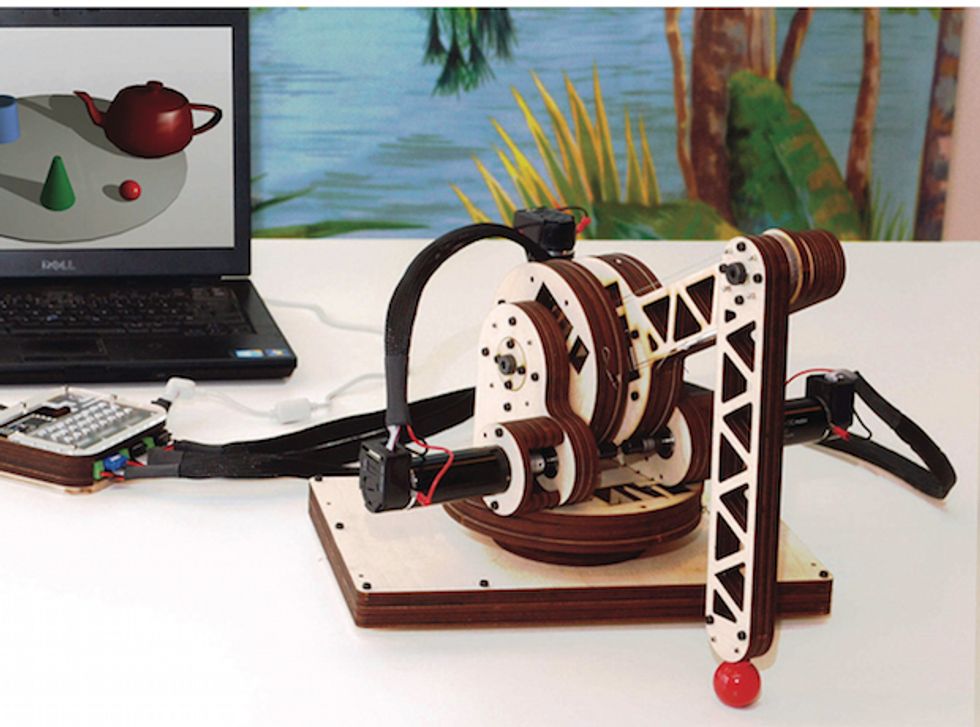
- WoodenHaptics
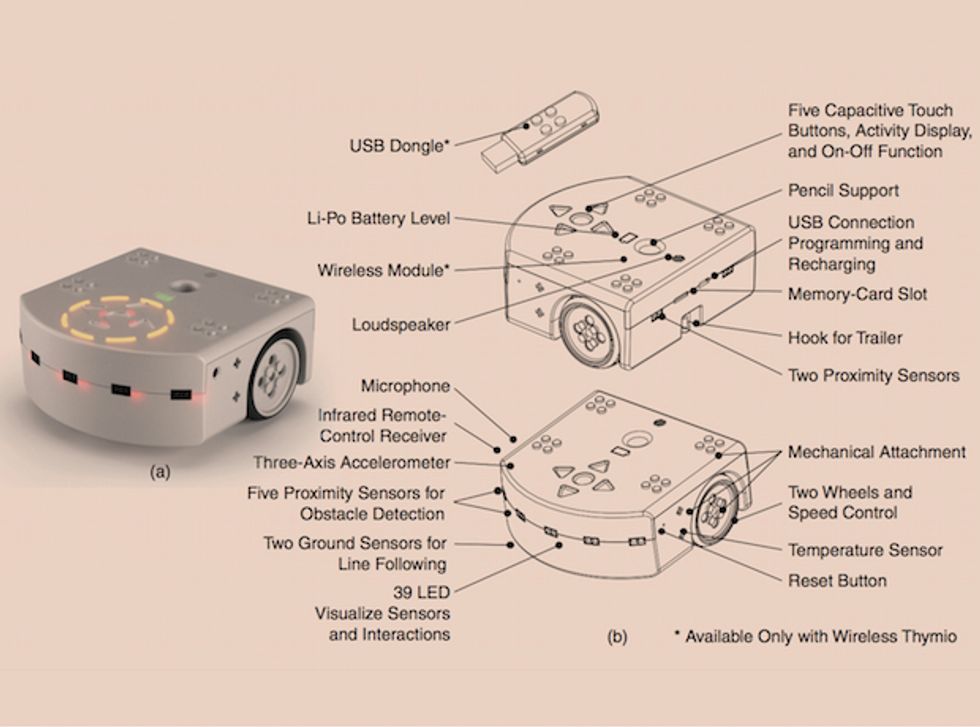
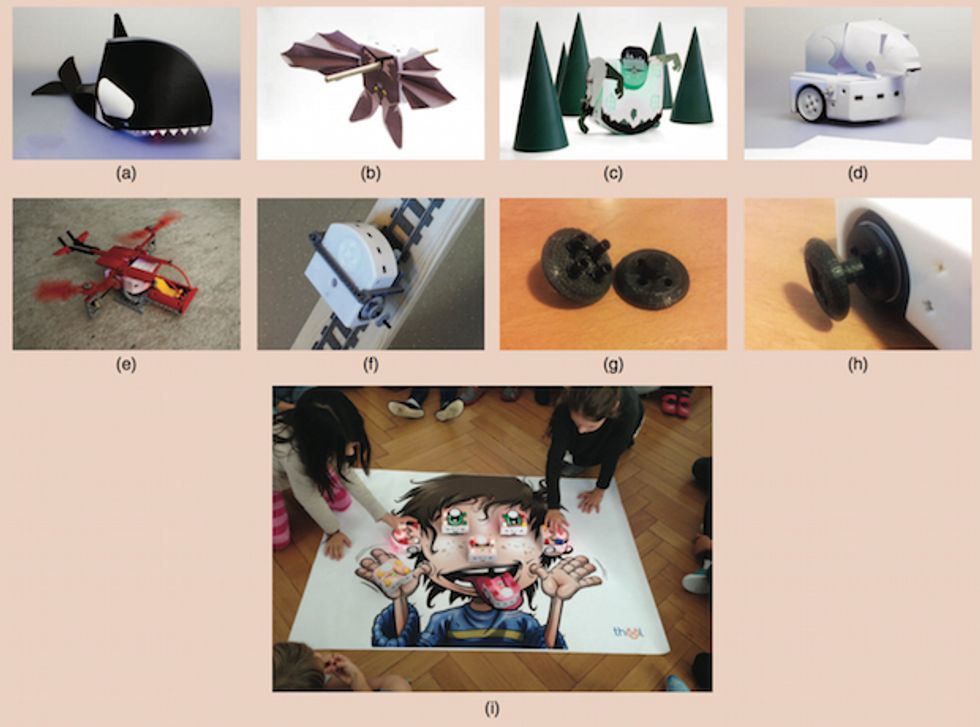
- Thymio
- Opsoro
We should note that many other notable open hardware platforms exist, like TurtleBot, iCub, and Ardupilot, just to mention a few (if you have other favorite projects, leave a note in the comments section).
To get an idea of what the projects featured in the RAM special issue are all about, take a look at the slideshow below, and then head out to IEEE Xplore for the full articles (also listed below).
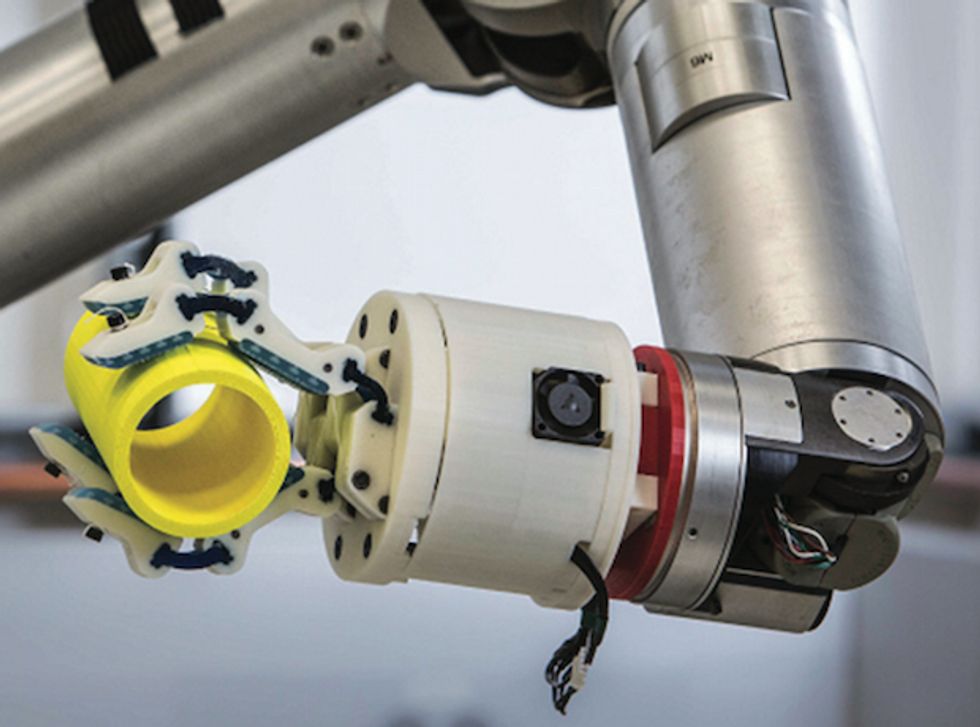
This underactuated, four-finger hand (mounted on a WAM arm) was the initial design in the Yale OpenHand Project.






IEEE Robotics & Automation Magazine special issue on open-source robot hardware (March 2017):
“Yale OpenHand Project: Optimizing Open-Source Hand Designs for Ease of Fabrication and Adoption,” By Raymond R. Ma and Aaron M. Dollar from Yale University, New Haven, Conn.
“Rapidly Prototyping Robots: Using Plates and Reinforced Flexures,” by
Ian Fitzner, Yue Sun, Vikram Sachdeva, and Shai Revzen from University of Michigan, Ann Arbor.
“The Quest for Natural Machine Motion: An Open Platform to Fast-Prototyping Articulated Soft Robots,” by Cosimo Della Santina, Cristina Piazza, Gian Maria Gasparri, Manuel Bonilla, Manuel Catalano, Manolo Garabini, Giorgio Grioli, and Antonio Bicchi from University of Pisa, Italy, and Istituto Italiano di Tecnologia, Genoa, Italy.
“The Soft Robotics Toolkit: Strategies for Overcoming Obstacles to the Wide Dissemination of Soft-Robotic Hardware,” by Dónal Holland, Colette Abah, Marielena Velasco Enriquez, Maxwell Herman, Gareth J. Bennett, Emir Vela, and Conor J. Walsh from University College Dublin, Ireland, Harvard University, Universidad de Ingeniería y Tecnología, Lima, Perú, Trinity College Dublin, Ireland, and University of New Mexico, Albuquerque.
“Spurring Innovation in Spatial Haptics: How Open-Source Hardware Can Turn Creativity Loose,” by Michael C. Yip and Jonas Forsslund from the University of California, San Diego and Forsslund Systems AB, Visby, Sweden.
“Bringing Robotics to Formal Education: The Thymio Open-Source Hardware Robot,” by Francesco Mondada, Michael Bonani, Fanny Riedo, Manon Briod, Léa Pereyre, Philippe Rétornaz, and Stéphane Magnenat from École Polytechnique Fédérale de Lausanne, Switzerland, Mobsya, Renens, Switzerland, and Swiss Federal Institute of Technology in Zurich, Switzerland.
“Do-It-Yourself Design for Social Robots: A Platform of Open-Source Hardware to Encourage Innovation,” by Cesar Vandevelde, Francis Wyffels, Bram Vanderborght, and Jelle Saldien from Ghent University, Kortrijk, Belgium, and Vrije Universiteit Brussel, Belgium, and Flanders Make.
Updated 3/28/17 3:24 pm ET