
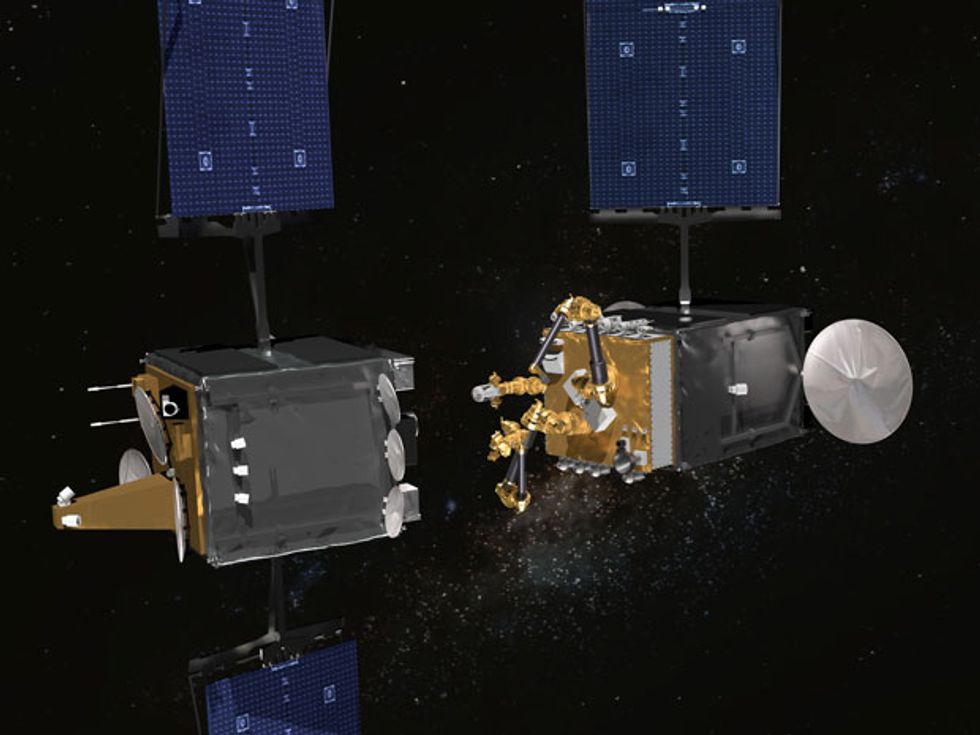
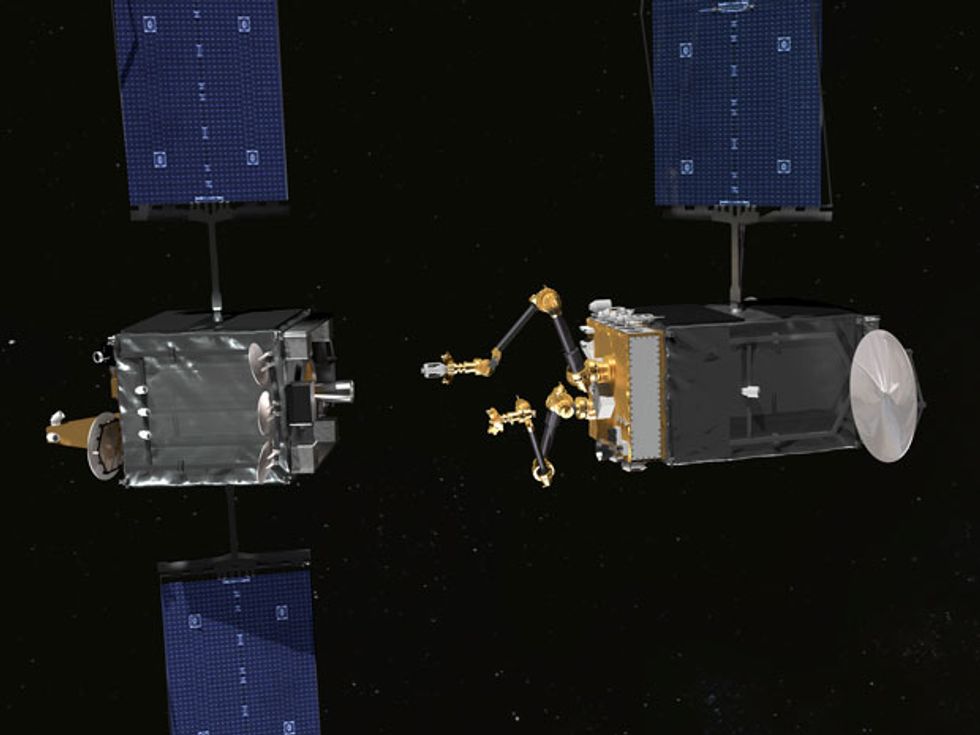
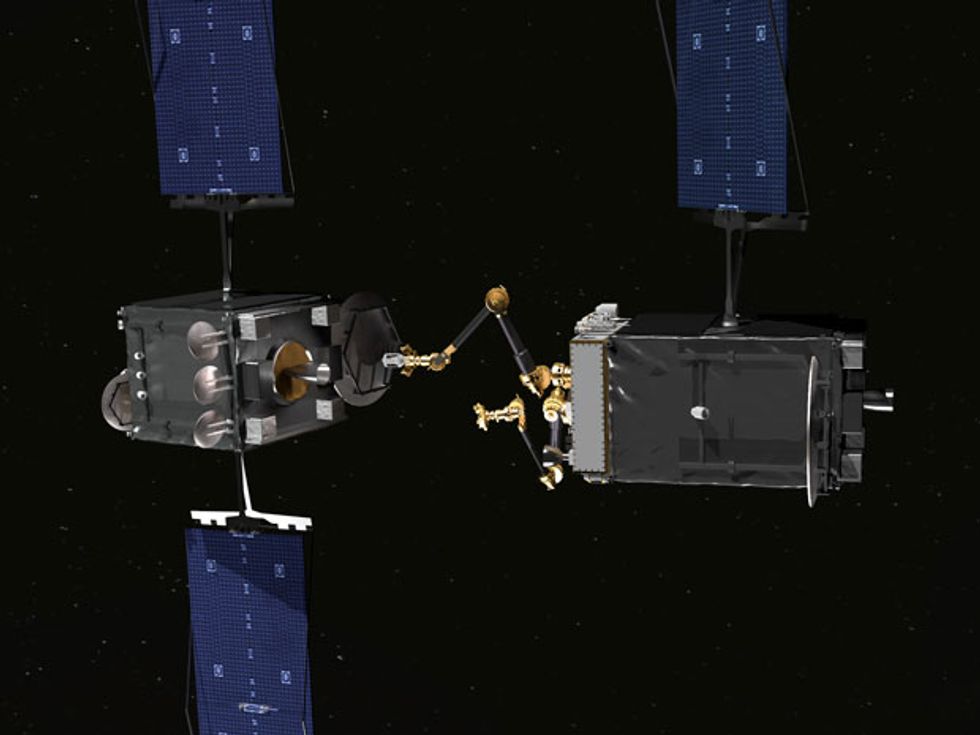
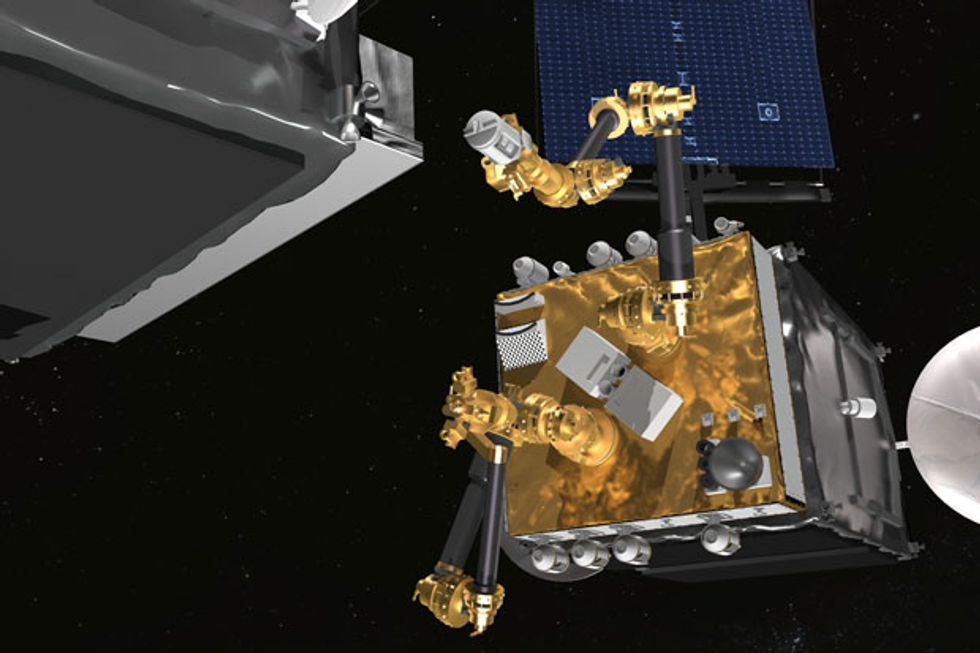
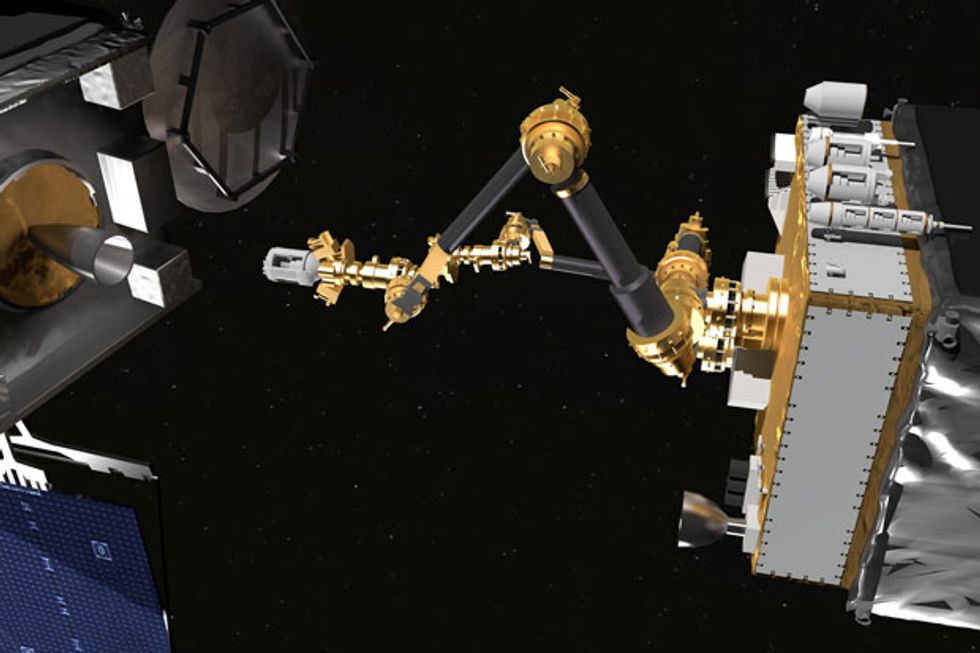
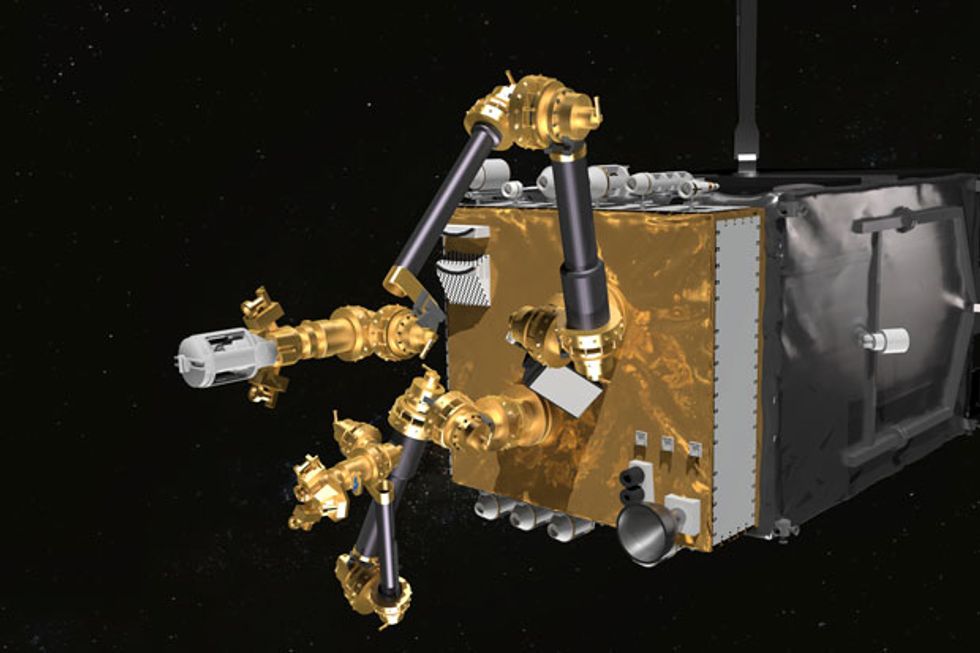
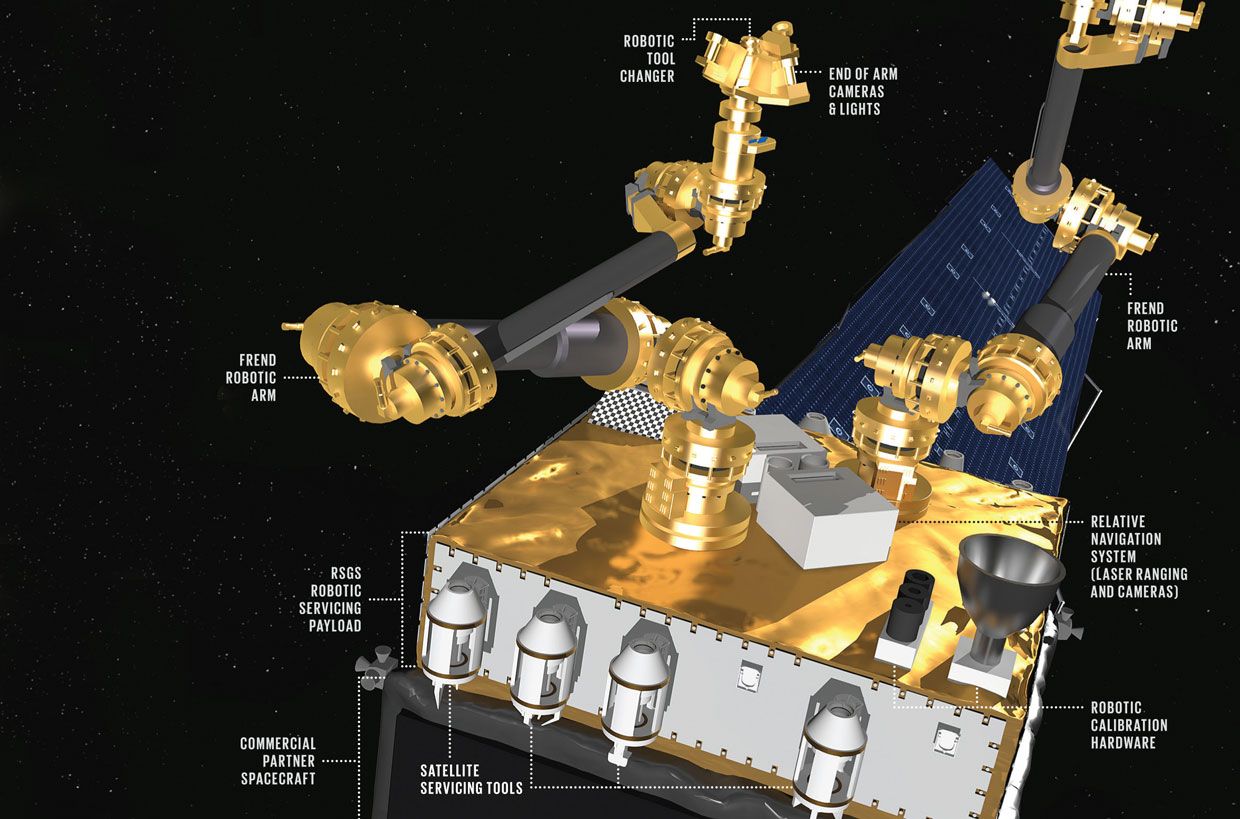
The RSGS spacecraft [right] will be able to approach, dock with, and service satellites in geosynchronous orbit.
Let’s say you are the program manager of a very large, complex system. Perhaps it’s an aircraft, or a building, or a communications network. Your system is valued at over US $500 million. Could you imagine being told that you won’t ever be able to maintain it? That, once it’s operational, it will never be inspected, repaired, or upgraded with new hardware?
Welcome to the world of satellite building. After a satellite is launched, it is on a one-way journey to disrepair and obsolescence, and there is little anyone can do to alter that path. Faults (which are called anomalies in the space business) can only be diagnosed remotely, using data and inferential reasoning. Software fixes and upgrades may be possible, but most mechanical anomalies can’t be corrected. And hardware can’t be replaced, which means that even if a satellite is operating well, it could lose its state-of-the-art status just a few years into a typical 15-year lifetime.
This is a lost opportunity. At this moment, more than 300 commercial satellites are providing television, radio, data transfer, weather, and telephony from geosynchronous earth orbit (GEO), some 36,000 kilometers above the Earth’s surface. Dozens of government satellites are there too. Each of those satellites costs hundreds of millions of dollars to build and launch. If governments and private companies could actively repair and revitalize their satellites in GEO—and move them to new orbits as needed—they could extend their investments and substantially defer the cost of building and launching replacements.
To be sure, people have already done such “servicing” work. In the past, astronauts have captured orbiting satellites—most notably in a series of space shuttle missions to repair and upgrade the Hubble Space Telescope. But these operations have been performed only in low Earth orbit, many thousands of kilometers closer to Earth, and each mission puts human lives on the line. Sending humans out to GEO would put them at even further risk, as they’d be exposed to more intense radiation from solar particles and cosmic rays.
The bottom line is this: If we hope to make satellite repair economical, safe, and routine, we’ll have to turn to robotics—that is, build spacecraft with dexterous robotic arms and design them so they can perform a range of delicate operations, often on their own.
The idea of building such robotic satellite servicers isn’t new, but we think it is finally starting to get some traction. We are now working on a project sponsored by the U.S. Defense Advanced Research Projects Agency (DARPA) to develop a robotic servicing spacecraft that can work on satellites that were never designed to be serviced—which is pretty much all of them in orbit today. This public-private partnership, the Robotic Servicing of Geosynchronous Satellites (RSGS) program, builds on a decade of work by DARPA (where coauthor Roesler works) and the U.S. Naval Research Laboratory (where Jaffe and Henshaw work), as well as the efforts of university researchers and space agencies around the world.
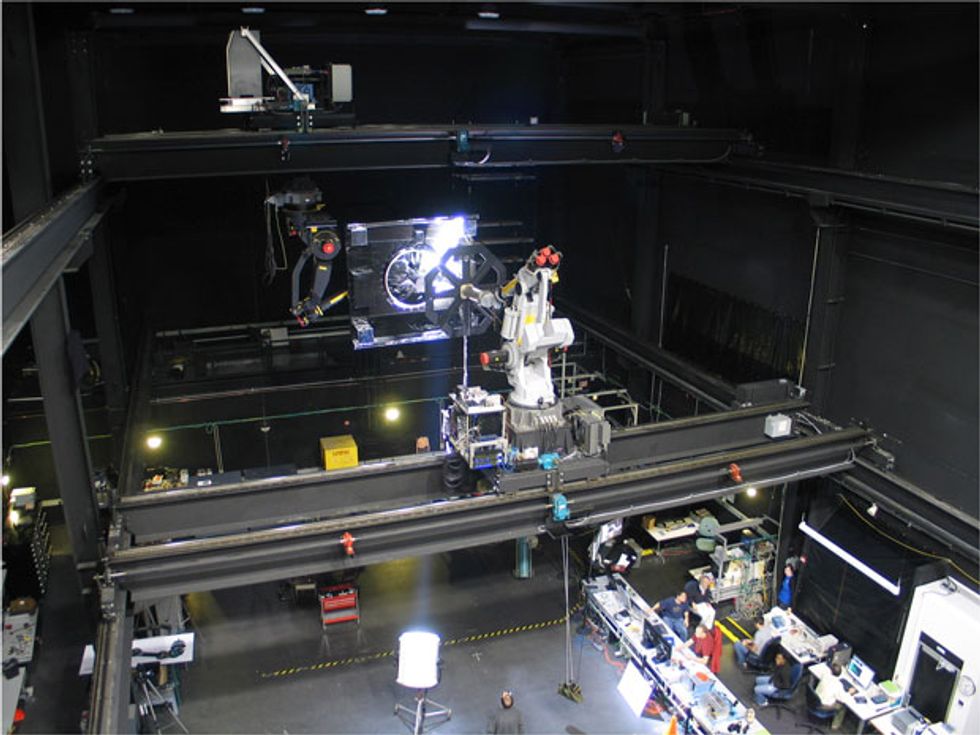
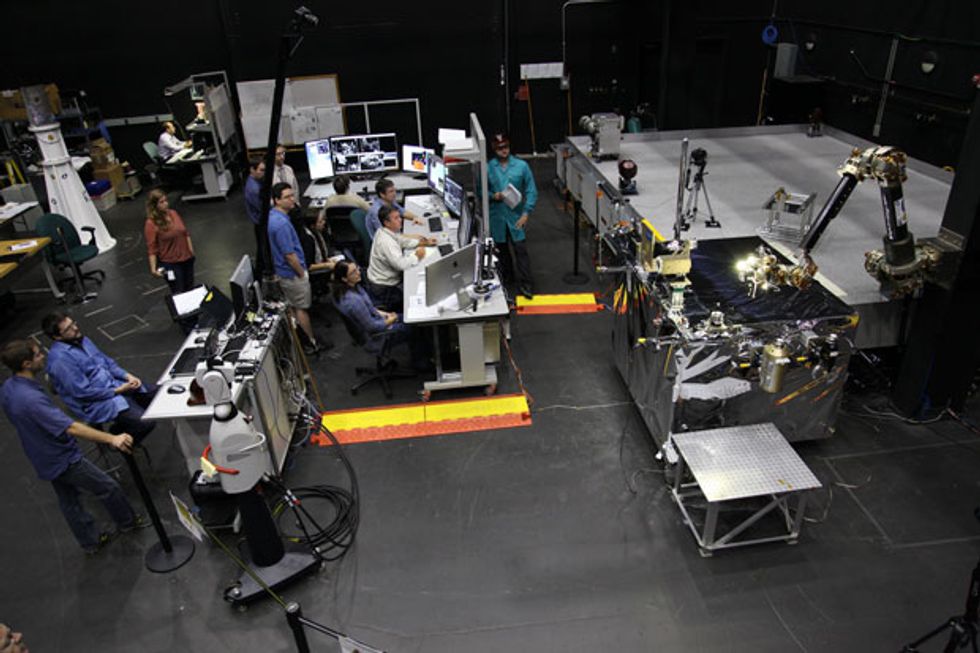
A crane system is used for RSGS tests at the U.S. Naval Research Laboratory.

When RSGS launches in the early 2020s, we will be able to work with satellite owners to move GEO satellites to new orbits, fix stuck solar panels, and perform several other important chores. Independently, NASA plans to launch a robotic mission around the same time called Restore-L, which aims to refuel and relocate a government-owned satellite in low Earth orbit.
If successful, these two missions will push the limits of automation and robotic operation in space. They could be the first steps toward space construction projects like vast solar arrays that can beam energy back to Earth, robots that could mine asteroids and deflect those that pose a danger to Earth, and many other applications that would revolutionize the way we operate in space and what we can accomplish there.
The development of robotic servicing has been stymied by a classic chicken-and-egg problem: Satellites aren’t designed to be serviced because there are no robotic servicers out there they need to be compatible with, and no one builds robotic servicers because there are no satellites for them to service.
This situation has persisted for decades, in large part because servicing satellites robotically is a really difficult problem. Satellites are built to be as lightweight as possible to keep launch costs down, and their systems are tightly integrated for the same reason. Even opening up a completed spacecraft to replace a part when it’s still in the factory is a major proposition.
To do even the most basic operation on a satellite, a robotic repair vehicle must be able to manipulate a very expensive, relatively fragile device under challenging conditions. Among these are high radiation levels, wildly varying temperatures and illumination, and time delays that dramatically complicate remote control. To add to the difficulty, an inadvertent tap can send something spinning away through the drag-free, frictionless environment.
To be successful, a robotic servicer’s electronic and mechanical systems must operate reliably because a computer crash or a motor failure could damage the patient. The robot must carry enough onboard intelligence to know how to avoid unintentionally hitting itself with its own arm or slamming into the client spacecraft. Both the position of its arms and the force they exert must be controlled with great precision. Above all it needs to be able to understand when things are going well, when they aren’t, and what to do in response.
Even in a terrestrial laboratory, these are challenging criteria, but roboticists have made great strides toward meeting them. The first in-space demonstration was done in the late 1990s by a Japanese flight experiment called Engineering Test Satellite VII, or ETS-VII. In 2007, the United States conducted a more ambitious on-orbit experiment, the DARPA Orbital Express program. ETS-VII had shown that a service robot can autonomously rendezvous and dock with another satellite. In addition to those tasks, Orbital Express demonstrated both fuel and component transfer. But neither ETS-VII nor Orbital Express solved the chicken-and-egg problem. Each mission launched two spacecraft—a servicer and a client satellite—and each client was specially designed to be compatible with the servicer’s robotic hardware.
The demonstrations were useful, but they weren’t sufficient to convince satellite makers to alter their designs to make them compatible with robotic maintenance (and of course, existing satellites would be ineligible for help). So in 2002, DARPA set out to answer a different question: What can a robotic servicer do for the sorts of satellites we have today, which aren’t made to be serviced? To help find the answer, the agency sponsored studies by researchers at NASA’s Jet Propulsion Laboratory, in Pasadena, Calif., and at the Naval Center for Space Technology (NCST) of the U.S. Naval Research Laboratory in Washington, D.C.—the oldest continuously operating satellite design and testing facility in the United States.
One study, called RescueSat, considered a fairly common scenario, in which a satellite reaches space but a rocket or motor failure prevents it from getting to its intended orbit. RescueSat concluded that at least one problem with servicing could be solved: the process of grabbing hold of the satellite, or “grappling.” It turns out that every satellite has structures that connect it to its booster, which separates shortly after launch. What remains after separation are large aluminum rings or bolt holes, which are exposed and strong. These can be grappled fairly easily by the robotic arms of a servicer. This robotic embrace would turn the two independently moving satellites into one rigid two-satellite assembly that could remain steady during servicing.
If a servicer can grapple a satellite with these exposed booster-attachment features, it should be able to push the satellite around and move it to a new orbit. But “should be” isn’t conclusive enough to convince satellite owners to allow a servicer to approach their spacecraft. So RescueSat was followed by a second study called Spacecraft for the Universal Modification of Orbits (SUMO), which tested the approach with real hardware, including a pair of commercially available robotic arms. This trial took advantage of a newly constructed facility at NCST that features a computer-controlled crane system that can move test satellites around as if they were in orbit. This system allows engineers to simulate rendezvous operations with realistic orbital mechanics, where firing a thruster in order to speed up or slow down will also put your spacecraft in a new orbit.
The main focus of the SUMO tests was autonomy, which is arguably the biggest technical challenge to robotic servicing. Owing largely to data-processing delays, it can take several seconds for pictures from a satellite in GEO to reach human operators on the ground, and the same interval again for a command to get back up to the satellite. This delay makes teleoperation quite challenging and even dangerous, so at certain times, such as during the last few meters of a servicer’s approach to a satellite, the servicer needs to be able to control itself—and be able to abort if anything seems to be going wrong.
By 2005, SUMO showed that it should be possible for a robotic servicer to safely and reliably approach and grab hold of another satellite using automated software. The project was a good proof of principle, but to get a more realistic simulation, we would need to test flight-quality robotic arms, ones that would be sturdy enough to handle the docking of two multiton objects in orbit. So in 2005, DARPA selected California-based Alliance Spacesystems, which built the robotic arm on NASA’s Curiosity rover, to construct a flight prototype under a program called Front-end Robotics Enabling Near-term Demonstration (FREND).
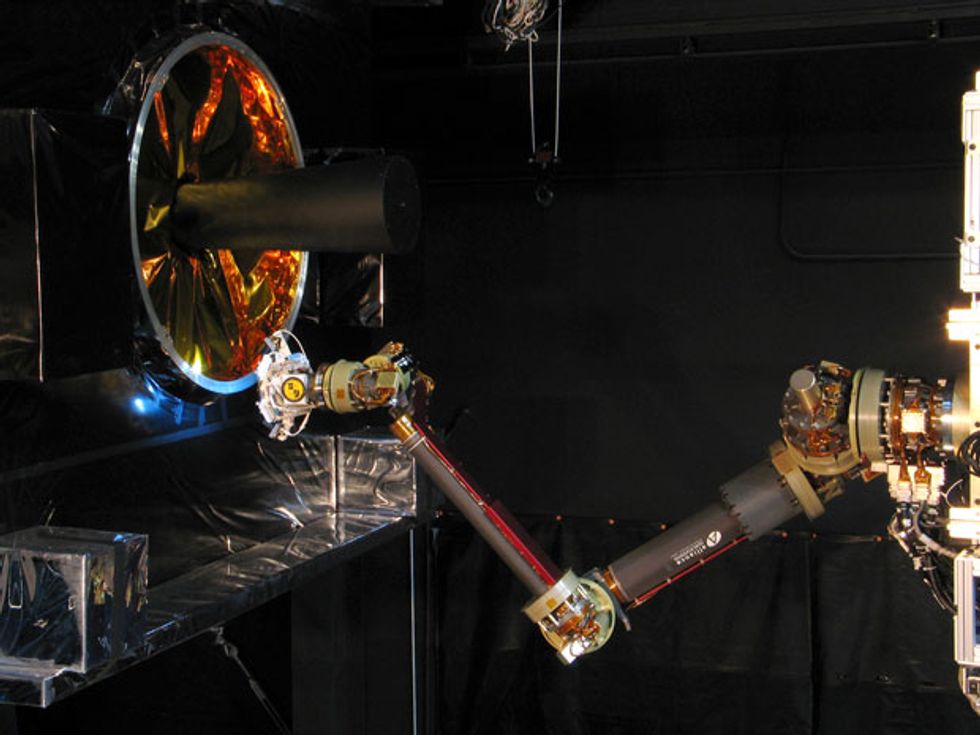
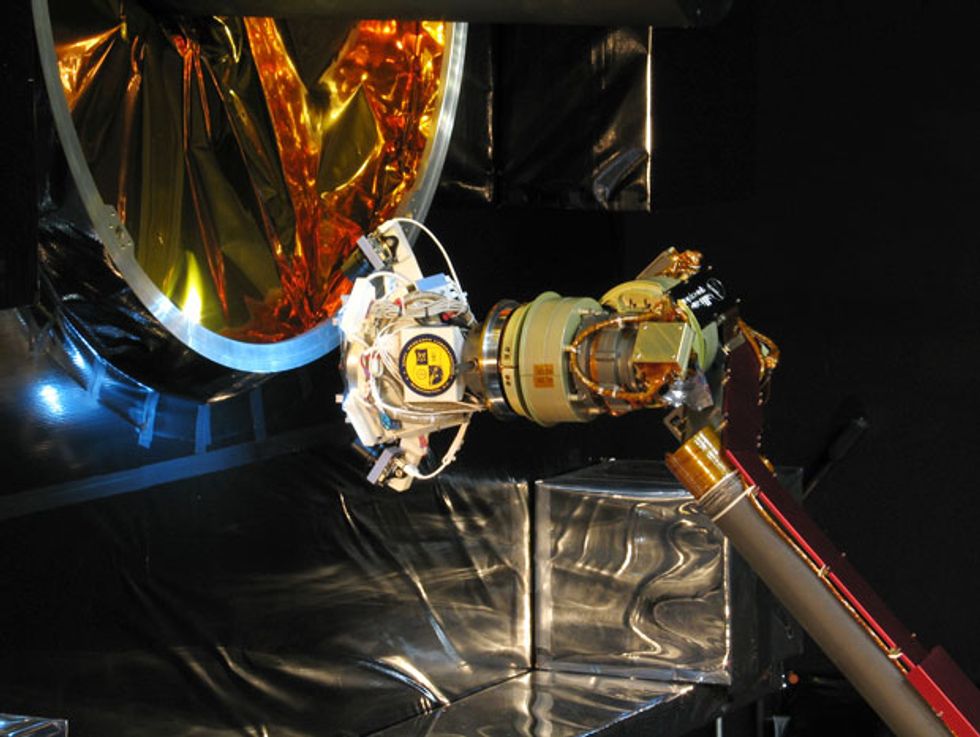
 The flight prototype FREND arm is installed in a thermal vacuum chamber at the U.S. Naval Research Laboratory, to test its resilience to the harsh conditions of space.Photo: U.S. Naval Research Laboratory
The flight prototype FREND arm is installed in a thermal vacuum chamber at the U.S. Naval Research Laboratory, to test its resilience to the harsh conditions of space.Photo: U.S. Naval Research Laboratory
Completed in 2008, the FREND arm was able to pass the rigorous tests required of hardware to fly in space. And it enabled the team at NCST to conduct more realistic experiments, using the simulator facility to test rendezvous-and-grappling processes under conditions that mimicked those in space.
One difficult factor that had to be simulated and addressed was lighting. Many parts of satellites are covered with thermal blankets that can be made of such materials as aluminized Mylar, the same material used in rescue blankets. Illuminated by the sunlight, some spacecraft parts may “sparkle.” Machine vision is used to process camera images, but the highly reflective, high-dynamic-range conditions in space are quite challenging, and they can cause the spacecraft to over- or underestimate distance. Rather than trying to solve this problem in software, laser-ranging sensors can be used to overcome this effect.
Another challenge was processing power. Space-qualified computers typically lag the state of the art by several generations. But during the SUMO and FREND programs, we demonstrated that we could implement all the needed autonomy, machine vision, and control software on CPUs considerably slower than those used in current terrestrial robots, and that we could make these slower systems work together in a reliable way.
You may have heard about satellite servicing a few years back. After FREND was complete, DARPA began a program called Phoenix, which looked at the possibility of harvesting large antennas from “dead” satellites and giving them new life by attaching electronics and propulsive modules. This very appealing idea would have been a first step toward doing something useful with what was otherwise “space junk.” But ultimately, DARPA decided that servicing active satellites in GEO would result in a higher payoff than refurbishing defunct spacecraft. Still, the tools and techniques developed in Phoenix are now available for the RSGS mission, which aims to offer commercial and military satellite operators a wide range of services to extend the lives of existing satellites.
Everything we’ve learnedfrom previous projects will go into RSGS. A commercial provider (recently announced to be Space Systems Loral) will build the spacecraft “bus”—the base of the spacecraft that will supply power and handle communications with the ground. The Naval Research Laboratory will assemble and test the payload to go atop it. This payload will consist of a laser-ranging system to help with long-distance targeting, a dozen cameras, two robotic arms with cameras mounted on the ends, more than 100 circuit boards, and a tool kit of appendages the arms can swap in and out like a multibit screwdriver. The arms—each 88 kilograms and 2.3 meters long—are improved versions of the FREND arm. The FREND team in Pasadena is now a subsidiary of MacDonald, Dettwiler and Associates, which built robotic arms for the space shuttles and the International Space Station.
RSGS will aim for geosynchronous orbit, and because GEO satellites orbit in or near a single plane, the RSGS servicer will be able to visit dozens of them throughout its planned 5- to 8-year lifetime.
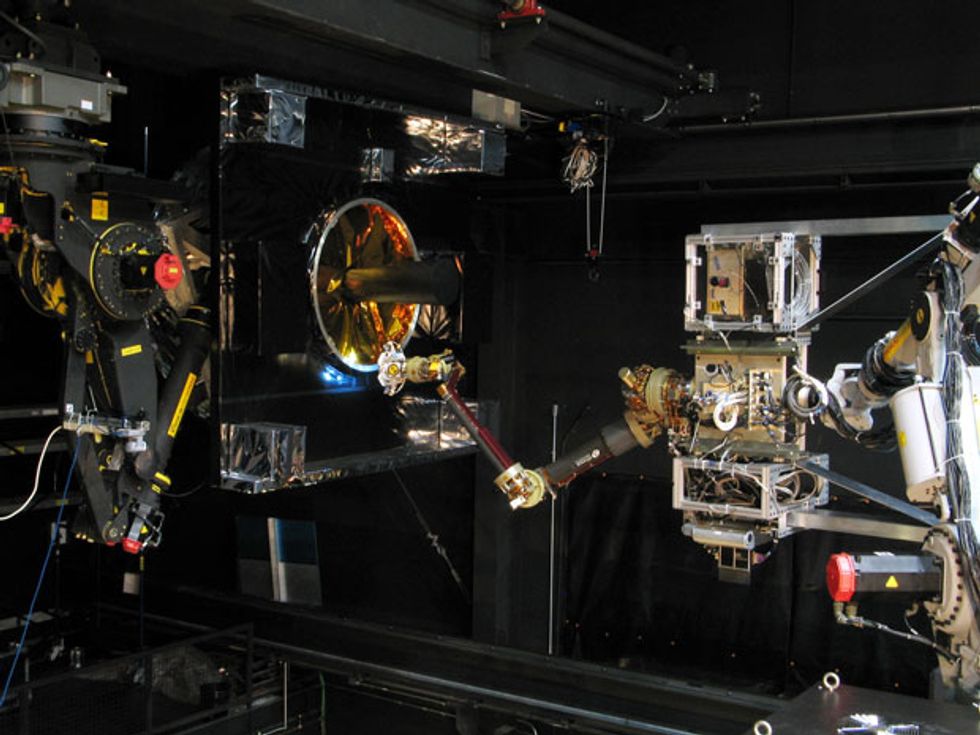
A view of the flight prototype FREND arm, with flightlike sensors, mounted in a simulation facility at the U.S. Naval Research Laboratory.
The spacecraft won’t be able to open up those tightly packaged satellites to swap out fried circuit boards and reseat connectors. But it could help correct some common mechanical problems, by using one of its robotic arms to hold onto a satellite while the other gently prods and “unsticks” a solar panel or antenna. These appendages are folded up for launch and are meant to unfold after they reach space. But once every two or three years, an antenna or solar panel does not deploy properly—and a mission costing hundreds of millions of dollars comes to naught.
These will be delicate operations. Antennas and solar panels are designed to be as lightweight as possible; in fact, spacecraft solar panel assemblies aren’t even strong enough to support their own weight in gravity. So, in order to ensure the robot is gentle enough to manipulate client spacecraft components without damaging them, we implemented a technique called compliance control. The force applied by an arm is constantly measured, and the robot joints are commanded to respond appropriately so the applied force always stays within a safe margin.
This sort of feedback will be important in space. Wide temperature swings alter dozens of parameters on the arm, including stiffness and coefficients of friction. In the current design, the RSGS arms will be able to push on a small spring mounted on the exterior of the servicer to make sure their force and torque sensors are calibrated properly throughout the mission.
Another valuable service that we began exploring with SUMO is pushing client satellites to new orbits. This could be done to help deliver a satellite to its intended orbit if it has failed to get there or to modify an existing orbit to save the spacecraft’s onboard fuel. RSGS’s repositioning capacity could also be useful at the end of a satellite’s life. Retiring satellites are moved some 300 km above GEO to ensure that the valuable orbit doesn’t get filled up with nonoperational satellites that could collide with others and create space debris. A servicer could be used to ferry satellites to this outer “graveyard” orbit, which would extend the satellites’ lives by allowing them to use the last of their fuel for routine operations.
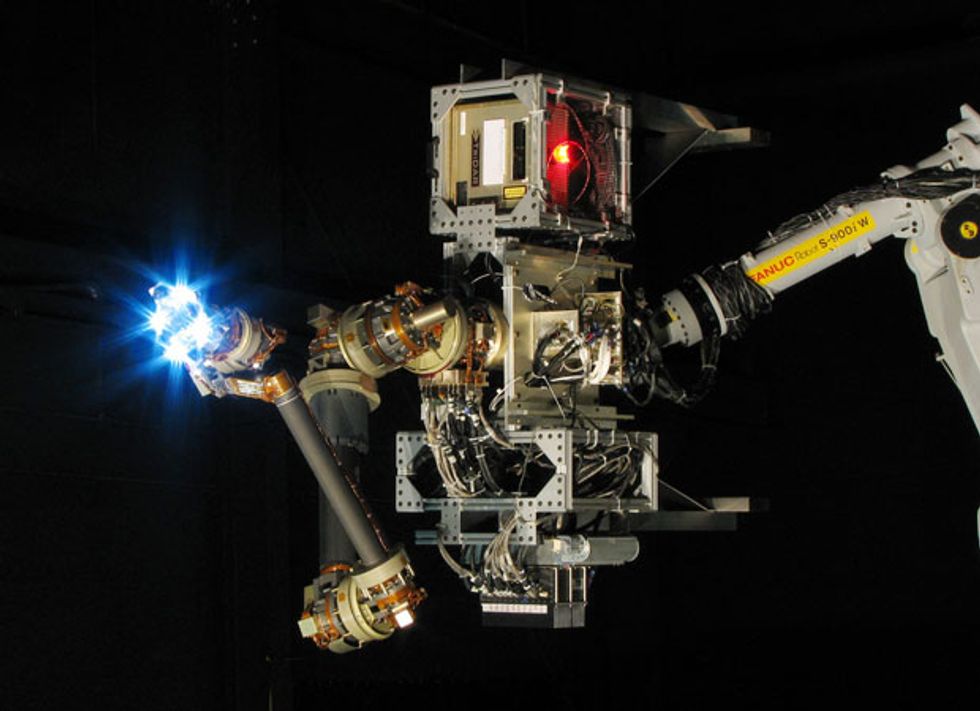
 RSGS will require a good deal of autonomy in order to safely work with other spacecraft in geosynchronous orbit. But a human will always be in the loop.Photo: U.S. Naval Research Laboratory
RSGS will require a good deal of autonomy in order to safely work with other spacecraft in geosynchronous orbit. But a human will always be in the loop.Photo: U.S. Naval Research Laboratory
A particularly exciting capability being developed for RSGS is to attach small new payloads to operating satellites. These modules would have to carry their own power and communications gear, but they could piggyback on an operating satellite’s positioning and propulsion capabilities to stay in the correct orbit and pointed in the right direction.
Because of communications delays—and the time it would take for an earthbound human operator to analyze the spacecraft’s position and other factors—it would be impractical and potentially dangerous to try to conduct these sorts of activities by remote control. As a result, we expect RSGS will use a mix of human and autonomous operation called supervised autonomy. A human will always be in the loop, monitoring RSGS’s activities, but for certain critical tasks such as grappling, the spacecraft will be on its own, performing either a prescripted activity or operating in a fully autonomous mode by which the servicer can rapidly respond if something does not go according to plan.
RSGS engineers are still working on this capability and expect to conduct more tests over the next few years. That effort includes the onboard software needed to control the servicer, which is expected to run to about a million lines of code—not unheard of for a spacecraft, but definitely more than the average satellite.
Space robotics capabilities that are being developed for RSGS and NASA’s Restore-L could be extended, in the long term, well beyond servicing existing satellites. Today, great effort is expended in complicated (and sometimes unreliable) mechanisms to maximize the size of mirrors and antennas that can be deployed from a single launch with a single satellite. But a dexterous and capable space robot could assemble pieces from multiple launches in space to construct antennas and other structures of enormous size.
On-orbit robotic construction could boost the sensitivity of radar imaging and speed of communications by allowing for much bigger and more sensitive radio antennas. It could also be a boon for Earth-observing satellites and astronomical telescopes.
We could even help address Earth’s growing energy demands. Nearly all spacecraft gather energy from solar panels. If we can increase the area of solar panels a thousand- or a millionfold, and send the energy to Earth via microwaves, we could create a new source of clean, constant, and globally transmissible energy [for more, see "It's Always Sunny in Space," IEEE Spectrum, May 2014]. This idea is starting to look more economically viable, thanks to the recent success of SpaceX and Blue Origin in recovering expensive booster rockets for reuse, and the ongoing development of modular and mass-producible space components.
Further in the future, robotic construction capabilities could also be applied to create space infrastructure—standing structures such as refueling depots, in-space manufacturing facilities, space-tourism complexes, and asteroid mining stations. And the same sorts of robots that can move satellites could also help keep the space environment around Earth safe, by helping eliminate space debris. Someday, work in this area might even lead to spacecraft capable of diverting asteroids from likely collision courses with Earth.
It may be decades before we can see scores of robots working in space. But within five years, we expect to have systems in orbit that can demonstrate the autonomy, dexterity, and delicacy needed to begin work on these more far-reaching capabilities. Delivering on their promise will require overcoming many technical as well as economic hurdles. But if RSGS succeeds in its mission to demonstrate autonomous servicing in GEO, it will send a message to satellite owners: A new robotic revolution awaits on the high frontier.
This article represents the authors’ personal views and not necessarily those of DARPA, NRL, or the U.S. Department of Defense.
About the Authors
Gordon Roesler heads the Robotic Servicing of Geosynchronous Satellites (RSGS) program for the U.S. Defense Advanced Research Projects Agency. Paul Jaffe and Glen Henshaw both work at the Naval Research Laboratory; Jaffe is a electronics engineer, and Henshaw is a roboticist.
This article appears in the March 2017 print issue as “Orbital Mechanics.”