
A week ago, Boston Dynamics posted a video of Atlas, Spot, and Handle dancing to “Do You Love Me.” It was, according to the video description, a way “to celebrate the start of what we hope will be a happier year.” As of today the video has been viewed nearly 24 million times, and the popularity is no surprise, considering the compelling mix of technical prowess and creativity on display.
Strictly speaking, the stuff going on in the video isn’t groundbreaking, in the sense that we’re not seeing any of the robots demonstrate fundamentally new capabilities, but that shouldn’t take away from how impressive it is—you’re seeing state-of-the-art in humanoid robotics, quadrupedal robotics, and whatever-the-heck-Handle-is robotics.
What is unique about this video from Boston Dynamics is the artistic component, much of which came through a collaboration with choreographer Monica Thomas (you can see more of her work here). We know that Atlas can do some practical tasks, and we know it can do some gymnastics and some parkour, but dancing is certainly something new. To learn more about what it took to make these dancing robots happen (and it’s much more complicated than it might seem), we spoke with Aaron Saunders, Boston Dynamics’ VP of Engineering.
Saunders started at Boston Dynamics in 2003, meaning that he’s been a fundamental part of a huge number of Boston Dynamics’ robots, even the ones you may have forgotten about. Remember LittleDog, for example? A team of two designed and built that adorable little quadruped, and Saunders was one of them.
While he’s been part of the Atlas project since the beginning (and had a hand in just about everything else that Boston Dynamics works on), Saunders has spent the last few years leading the Atlas team specifically, and he was kind enough to answer our questions about their dancing robots.
IEEE Spectrum: What’s your sense of how the Internet has been reacting to the video?
Aaron Saunders: We have different expectations for the videos that we make; this one was definitely anchored in fun for us. The response on YouTube was record-setting for us: We received hundreds of emails and calls with people expressing their enthusiasm, and also sharing their ideas for what we should do next, what about this song, what about this dance move, so that was really fun. My favorite reaction was one that I got from my 94-year-old grandma, who watched the video on YouTube and then sent a message through the family asking if I’d taught the robot those sweet moves. I think this video connected with a broader audience, because it mixed the old-school music with new technology.
We haven’t seen Atlas move like this before—can you talk about how you made it happen?
We started by working with dancers and a choreographer to create an initial concept for the dance by composing and assembling a routine. One of the challenges, and probably the core challenge for Atlas in particular, was adjusting human dance moves so that they could be performed on the robot. To do that, we used simulation to rapidly iterate through movement concepts while soliciting feedback from the choreographer to reach behaviors that Atlas had the strength and speed to execute. It was very iterative—they would literally dance out what they wanted us to do, and the engineers would look at the screen and go “that would be easy” or “that would be hard” or “that scares me.” And then we’d have a discussion, try different things in simulation, and make adjustments to find a compatible set of moves that we could execute on Atlas.
Throughout the project, the time frame for creating those new dance moves got shorter and shorter as we built tools, and as an example, eventually we were able to use that toolchain to create one of Atlas’ ballet moves in just one day, the day before we filmed, and it worked. So it’s not hand-scripted or hand-coded, it’s about having a pipeline that lets you take a diverse set of motions, that you can describe through a variety of different inputs, and push them through and onto the robot.
 Image: Boston Dynamics
Image: Boston Dynamics
Were there some things that were particularly difficult to translate from human dancers to Atlas? Or, things that Atlas could do better than humans?
Some of the spinning turns in the ballet parts took more iterations to get to work, because they were the furthest from leaping and running and some of the other things that we have more experience with, so they challenged both the machine and the software in new ways. We definitely learned not to underestimate how flexible and strong dancers are—when you take elite athletes and you try to do what they do but with a robot, it’s a hard problem. It’s humbling. Fundamentally, I don’t think that Atlas has the range of motion or power that these athletes do, although we continue developing our robots towards that, because we believe that in order to broadly deploy these kinds of robots commercially, and eventually in a home, we think they need to have this level of performance.
One thing that robots are really good at is doing something over and over again the exact same way. So once we dialed in what we wanted to do, the robots could just do it again and again as we played with different camera angles.
I can understand how you could use human dancers to help you put together a routine with Atlas, but how did that work with Spot, and particularly with Handle?
I think the people we worked with actually had a lot of talent for thinking about motion, and thinking about how to express themselves through motion. And our robots do motion really well—they’re dynamic, they’re exciting, they balance. So I think what we found was that the dancers connected with the way the robots moved, and then shaped that into a story, and it didn’t matter whether there were two legs or four legs. When you don’t necessarily have a template of animal motion or human behavior, you just have to think a little harder about how to go about doing something, and that’s true for more pragmatic commercial behaviors as well.
How does the experience that you get teaching robots to dance, or to do gymnastics or parkour, inform your approach to robotics for commercial applications?
We think that the skills inherent in dance and parkour, like agility, balance, and perception, are fundamental to a wide variety of robot applications. Maybe more importantly, finding that intersection between building a new robot capability and having fun has been Boston Dynamics’ recipe for robotics—it’s a great way to advance.
One good example is how when you push limits by asking your robots to do these dynamic motions over a period of several days, you learn a lot about the robustness of your hardware. Spot, through its productization, has become incredibly robust, and required almost no maintenance—it could just dance all day long once you taught it to. And the reason it’s so robust today is because of all those lessons we learned from previous things that may have just seemed weird and fun. You’ve got to go into uncharted territory to even know what you don’t know.
 Image: Boston Dynamics
Image: Boston Dynamics
It’s often hard to tell from watching videos like these how much time it took to make things work the way you wanted them to, and how representative they are of the actual capabilities of the robots. Can you talk about that?
Let me try to answer in the context of this video, but I think the same is true for all of the videos that we post. We work hard to make something, and once it works, it works. For Atlas, most of the robot control existed from our previous work, like the work that we’ve done on parkour, which sent us down a path of using model predictive controllers that account for dynamics and balance. We used those to run on the robot a set of dance steps that we’d designed offline with the dancers and choreographer. So, a lot of time, months, we spent thinking about the dance and composing the motions and iterating in simulation.
Dancing required a lot of strength and speed, so we even upgraded some of Atlas’ hardware to give it more power. Dance might be the highest power thing we’ve done to date—even though you might think parkour looks way more explosive, the amount of motion and speed that you have in dance is incredible. That also took a lot of time over the course of months; creating the capability in the machine to go along with the capability in the algorithms.
Once we had the final sequence that you see in the video, we only filmed for two days. Much of that time was spent figuring out how to move the camera through a scene with a bunch of robots in it to capture one continuous two-minute shot, and while we ran and filmed the dance routine multiple times, we could repeat it quite reliably. There was no cutting or splicing in that opening two-minute shot.
There were definitely some failures in the hardware that required maintenance, and our robots stumbled and fell down sometimes. These behaviors are not meant to be productized and to be a 100 percent reliable, but they’re definitely repeatable. We try to be honest with showing things that we can do, not a snippet of something that we did once. I think there’s an honesty required in saying that you’ve achieved something, and that’s definitely important for us.
You mentioned that Spot is now robust enough to dance all day. How about Atlas? If you kept on replacing its batteries, could it dance all day, too?
Atlas, as a machine, is still, you know… there are only a handful of them in the world, they’re complicated, and reliability was not a main focus. We would definitely break the robot from time to time. But the robustness of the hardware, in the context of what we were trying to do, was really great. And without that robustness, we wouldn’t have been able to make the video at all. I think Atlas is a little more like a helicopter, where there’s a higher ratio between the time you spend doing maintenance and the time you spend operating. Whereas with Spot, the expectation is that it’s more like a car, where you can run it for a long time before you have to touch it.
When you’re teaching Atlas to do new things, is it using any kind of machine learning? And if not, why not?
As a company, we’ve explored a lot of things, but Atlas is not using a learning controller right now. I expect that a day will come when we will. Atlas’ current dance performance uses a mixture of what we like to call reflexive control, which is a combination of reacting to forces, online and offline trajectory optimization, and model predictive control. We leverage these techniques because they’re a reliable way of unlocking really high performance stuff, and we understand how to wield these tools really well. We haven’t found the end of the road in terms of what we can do with them.
We plan on using learning to extend and build on the foundation of software and hardware that we’ve developed, but I think that we, along with the community, are still trying to figure out where the right places to apply these tools are. I think you’ll see that as part of our natural progression.
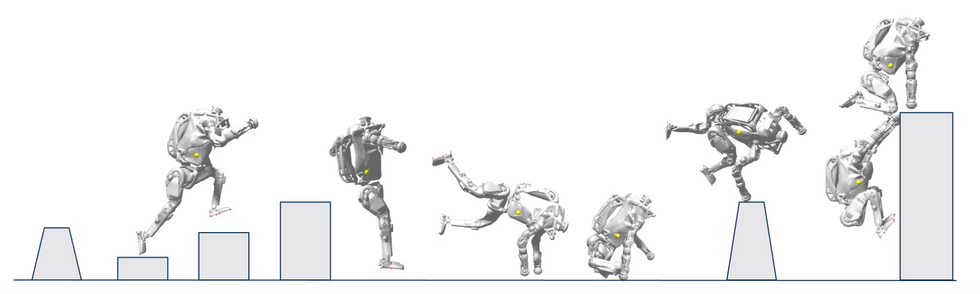 Image: Boston Dynamics
Image: Boston Dynamics
Much of Atlas’ dynamic motion comes from its lower body at the moment, but parkour makes use of upper body strength and agility as well, and we’ve seen some recent concept images showing Atlas doing vaults and pullups. Can you tell us more?
Humans and animals do amazing things using their legs, but they do even more amazing things when they use their whole bodies. I think parkour provides a fantastic framework that allows us to progress towards whole body mobility. Walking and running was just the start of that journey. We’re progressing through more complex dynamic behaviors like jumping and spinning, that’s what we’ve been working on for the last couple of years. And the next step is to explore how using arms to push and pull on the world could extend that agility.
One of the missions that I’ve given to the Atlas team is to start working on leveraging the arms as much as we leverage the legs to enhance and extend our mobility, and I’m really excited about what we’re going to be working on over the next couple of years, because it’s going to open up a lot more opportunities for us to do exciting stuff with Atlas.
What’s your perspective on hydraulic versus electric actuators for highly dynamic robots?
Across my career at Boston Dynamics, I’ve felt passionately connected to so many different types of technology, but I’ve settled into a place where I really don’t think this is an either-or conversation anymore. I think the selection of actuator technology really depends on the size of the robot that you’re building, what you want that robot to do, where you want it to go, and many other factors. Ultimately, it’s good to have both kinds of actuators in your toolbox, and I love having access to both—and we’ve used both with great success to make really impressive dynamic machines.
I think the only delineation between hydraulic and electric actuators that appears to be distinct for me is probably in scale. It’s really challenging to make tiny hydraulic things because the industry just doesn’t do a lot of that, and the reciprocal is that the industry also doesn’t tend to make massive electrical things. So, you may find that to be a natural division between these two technologies.
Besides what you’re working on at Boston Dynamics, what recent robotics research are you most excited about?
For us as a company, we really love to follow advances in sensing, computer vision, terrain perception, these are all things where the better they get, the more we can do. For me personally, one of the things I like to follow is manipulation research, and in particular manipulation research that advances our understanding of complex, friction-based interactions like sliding and pushing, or moving compliant things like ropes.
We’re seeing a shift from just pinching things, lifting them, moving them, and dropping them, to much more meaningful interactions with the environment. Research in that type of manipulation I think is going to unlock the potential for mobile manipulators, and I think it’s really going to open up the ability for robots to interact with the world in a rich way.
Is there anything else you’d like people to take away from this video?
For me personally, and I think it’s because I spend so much of my time immersed in robotics and have a deep appreciation for what a robot is and what its capabilities and limitations are, one of my strong desires is for more people to spend more time with robots. We see a lot of opinions and ideas from people looking at our videos on YouTube, and it seems to me that if more people had opportunities to think about and learn about and spend time with robots, that new level of understanding could help them imagine new ways in which robots could be useful in our daily lives. I think the possibilities are really exciting, and I just want more people to be able to take that journey.
This article appears in the March 2021 print issue as “Boston Dynamics & Hyundai: Let’s Dance.”
- Atlas Shows Most Impressive Parkour Skills We've Ever Seen - IEEE Spectrum ›
- Q&A: Boston Dynamics on Atlas’s Parkour Skills - IEEE Spectrum ›
- Atlas Shows Most Impressive Parkour Skills We’ve Ever Seen - IEEE Spectrum ›
- Building Human-Robot Relationships Through Music and Dance ›
- Boston Dynamics AI Institute Targets Basic Research - IEEE Spectrum ›
- Making Boston Dynamics’ Robots Dance - IEEE Spectrum ›
- Boston Dynamics’ Robert Playter on the New Atlas - IEEE Spectrum ›


