
Over the last 10 years, the PR2 has helped roboticists make an enormous amount of progress in mobile manipulation over a relatively short time. I mean, it’s been a decade already, but still—robots are hard, and giving a bunch of smart people access to a capable platform where they didn’t have to worry about hardware and could instead focus on doing interesting and useful things helped to establish a precedent for robotics research going forward.
Unfortunately, not everyone can afford an enormous US $400,000 robot, and even if they could, PR2s are getting very close to the end of their lives. There are other mobile manipulators out there taking the place of the PR2, but so far, size and cost have largely restricted them to research labs. Lots of good research is being done, but it’s getting to the point where folks want to take the next step: making mobile manipulators real-world useful.
Today, a company called Hello Robot is announcing a new mobile manipulator called the Stretch RE1. With offices in the San Francisco Bay Area and in Atlanta, Ga., Hello Robot is led by Aaron Edsinger and Charlie Kemp, and by combining decades of experience in industry and academia they’ve managed to come up with a robot that’s small, lightweight, capable, and affordable, all at the same time. For now, it’s a research platform, but eventually, its creators hope that it will be able to come into our homes and take care of us when we need it to.
A fresh look at mobile manipulators
To understand the concept behind Stretch, it’s worth taking a brief look back at what Edsinger and Kemp have been up to for the past 10 years. Edsinger co-founded Meka Robotics in 2007, which built expensive, high performance humanoid arms, torsos, and heads for the research market. Meka was notable for being the first robotics company (as far as we know) to sell robot arms that used series elastic actuators, and the company worked extensively with Georgia Tech researchers. In 2011, Edsinger was one of the co-founders of Redwood Robotics (along with folks from SRI and Willow Garage), which was going to develop some kind of secret and amazing new robot arm before Google swallowed it in late 2013. At the same time, Google also acquired Meka and a bunch of other robotics companies, and Edsinger ended up at Google as one of the directors of its robotics program, until he left to co-found Hello Robot in 2017.
Meanwhile, since 2007 Kemp has been a robotics professor at Georgia Tech, where he runs the Healthcare Robotics Lab. Kemp’s lab was one of the 11 PR2 beta sites, giving him early experience with a ginormous mobile manipulator. Much of the research that Kemp has spent the last decade on involves robots providing assistance to untrained users, often through direct physical contact, and frequently either in their own homes or in a home environment. We should mention that the Georgia Tech PR2 is still going, most recently doing some clever material classification work in a paper for IROS later this year.
 Hello Robot co-founder and CEO Aaron Edsinger says that, although Stretch is currently a research platform, he hopes to see the robot deployed in home environments, adding that the “impact we want to have is through robots that are helpful to people in society.”Photo: Hello Robot
Hello Robot co-founder and CEO Aaron Edsinger says that, although Stretch is currently a research platform, he hopes to see the robot deployed in home environments, adding that the “impact we want to have is through robots that are helpful to people in society.”Photo: Hello Robot
So with all that in mind, where’d Hello Robot come from? As it turns out, both Edsinger and Kemp were in Rodney Brooks’ group at MIT, so it’s perhaps not surprising that they share some of the same philosophies about what robots should be and what they should be used for. After collaborating on a variety of projects over the years, in 2017 Edsinger was thinking about his next step after Google when Kemp stopped by to show off some video of a new robot prototype that he’d been working on—the prototype for Stretch. “As soon as I saw it, I knew that was exactly the kind of thing I wanted to be working on,” Edsinger told us. “I’d become frustrated with the complexity of the robots being built to do manipulation in home environments and around people, and it solved a lot of problems in an elegant way.”
For Kemp, Stretch is an attempt to get everything he’s been teaching his robots out of his lab at Georgia Tech and into the world where it can actually be helpful to people. “Right from the beginning, we were trying to take our robots out to real homes and interact with real people,” says Kemp. Georgia Tech’s PR2, for example, worked extensively with Henry and Jane Evans, helping Henry (a quadriplegic) regain some of the bodily autonomy he had lost. With the assistance of the PR2, Henry was able to keep himself comfortable for hours without needing a human caregiver to be constantly with him. “I felt like I was making a commitment in some ways to some of the people I was working with,” Kemp told us. “But 10 years later, I was like, where are these things? I found that incredibly frustrating. Stretch is an effort to try to push things forward.”
A robot you can put in the backseat of a car
One way to put Stretch in context is to think of it almost as a reaction to the kitchen sink philosophy of the PR2. Where the PR2 was designed to be all the robot anyone could ever need (plus plenty of robot that nobody really needed) embodied in a piece of hardware that weighs 225 kilograms and cost nearly half a million dollars, Stretch is completely focused on being just the robot that is actually necessary in a form factor that’s both much smaller and affordable. The entire robot weighs a mere 23 kg in a footprint that’s just a 34 cm square. As you can see from the video, it’s small enough (and safe enough) that it can be moved by a child. The cost? At $17,950 apiece—or a bit less if you buy a bunch at once—Stretch costs a fraction of what other mobile manipulators sell for.
It might not seem like size or weight should be that big of an issue, but it very much is, explains Maya Cakmak, a robotics professor at the University of Washington, in Seattle. Cakmak worked with PR2 and Henry Evans when she was at Willow Garage, and currently has access to both a PR2 and a Fetch research robot. “When I think about my long term research vision, I want to deploy service robots in real homes,” Cakmak told us. Unfortunately, it’s the robots themselves that have been preventing her from doing this—both the Fetch and the PR2 are large enough that moving them anywhere requires a truck and a lift, which also limits the home that they can be used in. “For me, I felt immediately that Stretch is very different, and it makes a lot of sense,” she says. “It’s safe and lightweight, you can probably put it in the backseat of a car.” For Cakmak, Stretch’s size is the difference between being able to easily take a robot to the places she wants to do research in, and not. And cost is a factor as well, since a cheaper robot means more access for her students. “I got my refurbished PR2 for $180,000,” Cakmak says. “For that, with Stretch I could have 10!”
Of course, a portable robot doesn’t do you any good if the robot itself isn’t sophisticated enough to do what you need it to do. Stretch is certainly a compromise in functionality in the interest of small size and low cost, but it’s a compromise that’s been carefully thought out, based on the experience that Edsinger has building robots and the experience that Kemp has operating robots in homes. For example, most mobile manipulators are essentially multi-degrees-of-freedom arms on mobile bases. Stretch instead leverages its wheeled base to move its arm in the horizontal plane, which (most of the time) works just as well as an extra DoF or two on the arm while saving substantially on weight and cost. Similarly, Stretch relies almost entirely on one sensor, an Intel RealSense D435i on a pan-tilt head that gives it a huge range of motion. The RealSense serves as a navigation camera, manipulation camera, a 3D mapping system, and more. It’s not going to be quite as good for a task that might involve fine manipulation, but most of the time it’s totally workable and you’re saving on cost and complexity.
Stretch has been relentlessly optimized to be the absolutely minimum robot to do mobile manipulation in a home or workplace environment. In practice, this meant figuring out exactly what it was absolutely necessary for Stretch to be able to do. With an emphasis on manipulation, that meant defining the workspace of the robot, or what areas it’s able to usefully reach. “That was one thing we really had to push hard on,” says Edsinger. “Reachability.” He explains that reachability and a small mobile base tend not to go together, because robot arms (which tend to weigh a lot) can cause a small base to tip, especially if they’re moving while holding a payload. At the same time, Stretch needed to be able to access both countertops and the floor, while being able to reach out far enough to hand people things without having to be right next to them. To come up with something that could meet all those requirements, Edsinger and Kemp set out to reinvent the robot arm.
Stretch’s key innovation: a stretchable arm
The design they came up with is rather ingenious in its simplicity and how well it works. Edsinger explains that the arm consists of five telescoping links: one fixed and four moving. They are constructed of custom carbon fiber, and are driven by a single motor, which is attached to the robot’s vertical pole. The strong, lightweight structure allows the arm to extend over half a meter and hold up to 1.5 kg. Although the company has a patent pending for the design, Edsinger declined to say whether the links are driven by a belt, cables, or gears. “We don’t want to disclose too much of the secret sauce [with regard to] the drive mechanism.” He added that the arm was “one of the most significant engineering challenges on the robot in terms of getting the desired reach, compactness, precision, smoothness, force sensitivity, and low cost to all happily coexist.”
 Stretch’s arm consists of five telescoping links constructed of custom carbon fiber, and are driven by a single motor, which is attached to the robot’s vertical pole, minimizing weight and inertia. The arm has a reach of over half a meter and can hold up to 1.5 kg.Photo: Hello Robot
Stretch’s arm consists of five telescoping links constructed of custom carbon fiber, and are driven by a single motor, which is attached to the robot’s vertical pole, minimizing weight and inertia. The arm has a reach of over half a meter and can hold up to 1.5 kg.Photo: Hello Robot
Another interesting features of Stretch is its interface with the world—its gripper. There are countless different gripper designs out there, each and every one of which is the best at gripping some particular subset of things. But making a generalized gripper for all of the stuff that you’d find in a home is exceptionally difficult. Ideally, you’d want some sort of massive experimental test program where thousands and thousands of people test out different gripper designs in their homes for long periods of time and then tell you which ones work best. Obviously, that’s impractical for a robotics startup, but Kemp realized that someone else was already running the study for him: Amazon.
“I had this idea that there are these assistive grabbers that people with disabilities use to grasp objects in the real world,” he told us. Kemp went on Amazon’s website and looked at the top 10 grabbers and the reviews from thousands of users. He then bought a bunch of different ones and started testing them. “This one [Stretch’s gripper], I almost didn’t order it, it was such a weird looking thing,” he says. “But it had great reviews on Amazon, and oh my gosh, it just blew away the other grabbers. And I was like, that’s it. It just works.”
Stretch’s teleoperated and autonomous capabilities
As with any robot intended to be useful outside of a structured environment, hardware is only part of the story, and arguably not even the most important part. In order for Stretch to be able to operate out from under the supervision of a skilled roboticist, it has to be either easy to control, or autonomous. Ideally, it’s both, and that’s what Hello Robot is working towards, although things didn’t start out that way, Kemp explains. “From a minimalist standpoint, we began with the notion that this would be a teleoperated robot. But in the end, you just don’t get the real power of the robot that way, because you’re tied to a person doing stuff. As much as we fought it, autonomy really is a big part of the future for this kind of system.”
Here’s a look at some of Stretch’s teleoperated capabilities. We’re told that Stretch is very easy to get going right out of the box, although this teleoperation video from Hello Robot looks like it’s got a skilled and experienced user in the loop:
For such a low-cost platform, the autonomy (even at this early stage) is particularly impressive:
Since it’s not entirely clear from the video exactly what’s autonomous, here’s a brief summary of a couple of the more complex behaviors that Kemp sent us:
- Object grasping: Stretch uses its 3D camera to find the nearest flat surface using a virtual overhead view. It then segments significant blobs on top of the surface. It selects the largest blob in this virtual overhead view and fits an ellipse to it. It then generates a grasp plan that makes use of the center of the ellipse and the major and minor axes. Once it has a plan, Stretch orients its gripper, moves to the pre-grasp pose, moves to the grasp pose, closes its gripper based on the estimated object width, lifts up, and retracts.
- Mapping, navigating, and reaching to a 3D point: These demonstrations all use FUNMAP (Fast Unified Navigation, Manipulation and Planning). It’s all novel custom Python code. Even a single head scan performed by panning the 3D camera around can result in a very nice 3D representation of Stretch’s surroundings that includes the nearby floor. This is surprisingly unusual for robots, which often have their cameras too low to see many interesting things in a human environment. While mapping, Stretch selects where to scan next in a non-trivial way that considers factors such as the quality of previous observations, expected new observations, and navigation distance. The plan that Stretch uses to reach the target 3D point has been optimized for navigation and manipulation. For example, it finds a final robot pose that provides a large manipulation workspace for Stretch, which must consider nearby obstacles, including obstacles on the ground.
- Object handover: This is a simple demonstration of object handovers. Stretch performs Cartesian motions to move its gripper to a body-relative position using a good motion heuristic, which is to extend the arm as the last step. These simple motions work well due to the design of Stretch. It still surprises me how well it moves the object to comfortable places near my body, and how unobtrusive it is. The goal point is specified relative to a 3D frame attached to the person’s mouth estimated using deep learning models (shown in the RViz visualization video). Specifically, Stretch targets handoff at a 3D point that is 20 cm below the estimated position of the mouth and 25 cm away along the direction of reaching.
Much of these autonomous capabilities come directly from Kemp’s lab, and the demo code is available for anyone to use. (Hello Robot says all of Stretch’s software is open source.)
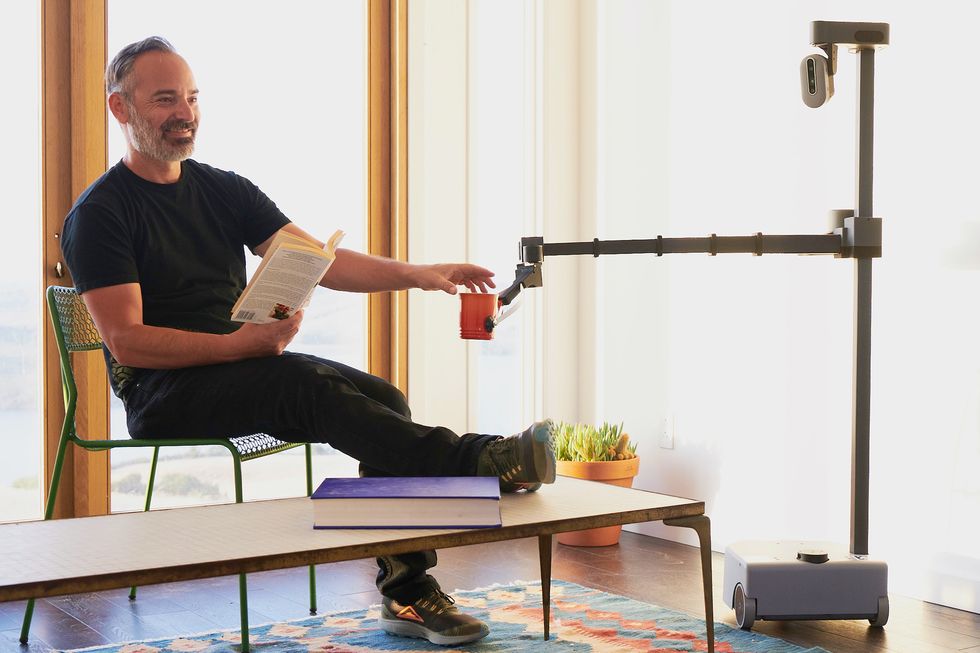 Hello Robot co-founder and CEO Aaron Edsinger says Stretch is designed to work with people in homes and workplaces and can be teleoperated to do a variety of tasks, including picking up toys, removing laundry from a dryer, and playing games with kids.Photo: Hello Robot
Hello Robot co-founder and CEO Aaron Edsinger says Stretch is designed to work with people in homes and workplaces and can be teleoperated to do a variety of tasks, including picking up toys, removing laundry from a dryer, and playing games with kids.Photo: Hello Robot
As of right now, Stretch is very much a research platform. You’re going to see it in research labs doing research things, and hopefully in homes and commercial spaces as well, but still under the supervision of professional roboticists. As you may have guessed, though, Hello Robot’s vision is a bit broader than that. “The impact we want to have is through robots that are helpful to people in society,” Edsinger says. “We think primarily in the home context, but it could be in healthcare, or in other places. But we really want to have our robots be impactful, and useful. To us, useful is exciting.” Adds Kemp: “I have a personal bias, but we’d really like this technology to benefit older adults and caregivers. Rather than creating a specialized assistive device, we want to eventually create an inexpensive consumer device for everyone that does lots of things.”
Neither Edsinger nor Kemp would say much more on this for now, and they were very explicit about why—they’re being deliberately cautious about raising expectations, having seen what’s happened to some other robotics companies over the past few years. Without VC funding (Hello Robot is currently bootstrapping itself into existence), Stretch is being sold entirely on its own merits. So far, it seems to be working. Stretch robots are already in a half dozen research labs, and we expect that with today’s announcement, we’ll start seeing them much more frequently.
This article appears in the October 2020 print issue as “A Robot That Keeps It Simple.”


