
Roboticists are getting quite good at making robots with soft, flexible bodies. There are lots of good reasons to do this: Robots with inherent compliance can be safer to work around, more resilient to damage, and can leverage lots of unique methods of locomotion. The issue with soft robots is that you often have to make compromises when it comes to powering them or getting them to move, because those things usually involve the addition of components that aren’t soft at all, like batteries and actuators.
Over the last week or so, two new methods of soft robot locomotion have shown up in the news: One of them using external magnetic fields, and the other using an electric field to power flapping fins.
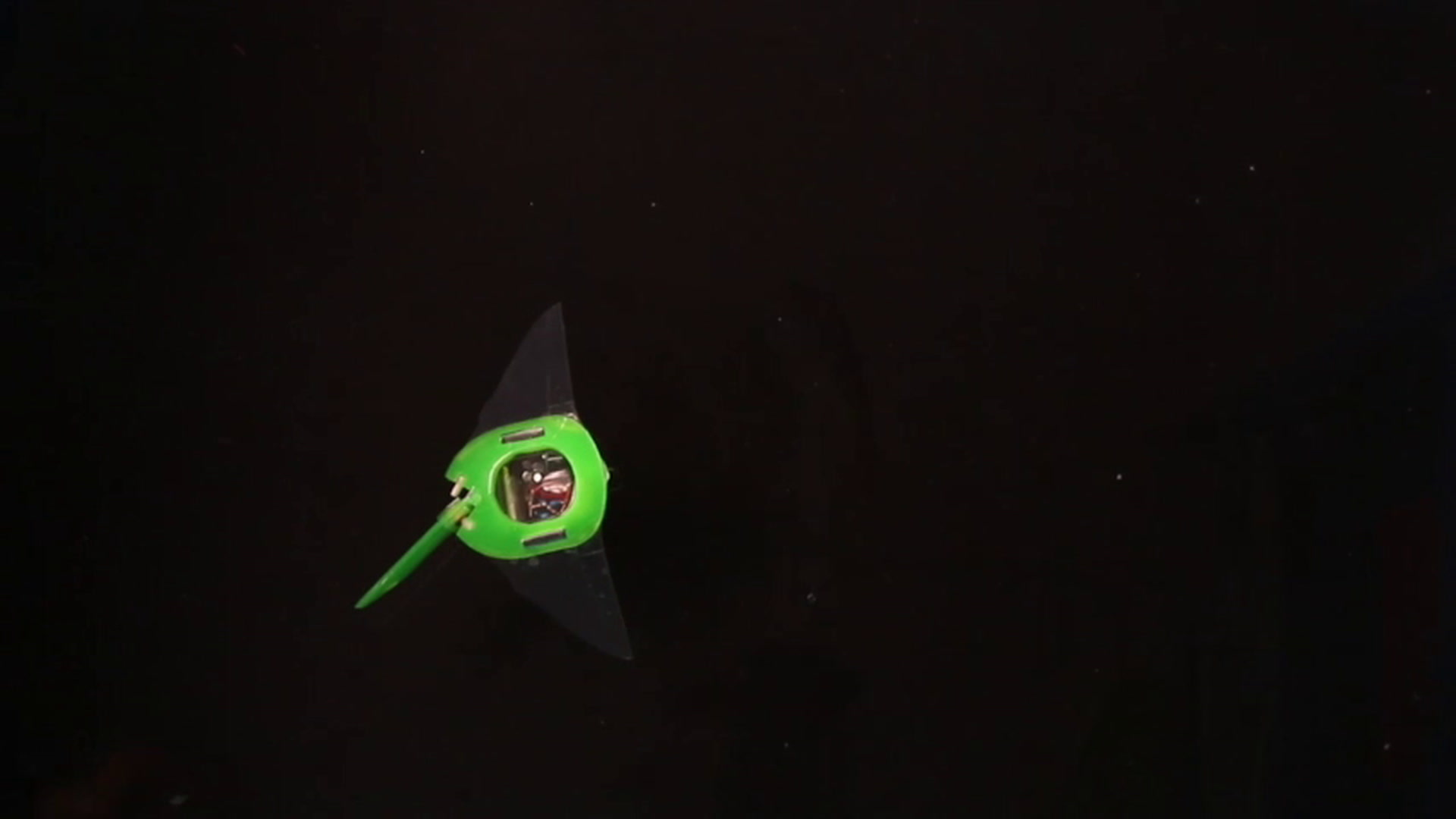
This robotic ray, which was developed at Zhejiang University in Hangzhou, China, is propelled by soft flapping wings made of dielectric elastomers, which bend when electricity is applied to them. Dielectric elastomers respond very quickly with relatively large motions, but they require very high voltages (on the order of 10 kilovolts) to get them to work. Traditionally, dielectric elastomers are covered in insulation, but for this aquatic application the researchers instead just submerged everything insulation free, relying on the water to act as both electrode and electric ground.
There are several other reasons why this design is notable. First, it’s almost entirely transparent, with the body, fins, tail, and elastomer muscles being completely see-through. The effect is slightly spoiled when you add the electronics and batteries required for untethered operation, but the fact that it can be self-contained at all is notable as well: A 450-mAh, 3.7-V battery will keep it swimming along at 1.1 centimeters per second for a solid 3 hours and 15 minutes, and it can even carry a tiny camera. Maximum untethered speed is 6.4 cm/s, and the robot fish will happily swim around in water temperatures ranging from slightly above freezing to nearly 75° C.
The overall efficiency of this robot is comparable to a rainbow trout, in the sense that a 25-cm long trout expends about 0.03 watt to move at 10 cm/s. A real trout can move much faster and more dynamically, of course, but for robots, hitting that biological level of efficiency is much more significant. The researchers aren’t yet ready to suggest any specific applications for the robot, so it’s probably better to simply look at it as proof that these technologies work, leaving a practical robot for the next generation.
“Fast-Moving Soft Electronic Fish,” by T. Li, G. Li, Y. Liang, T. Cheng, J. Dai, X. Yang, B. Liu, Z. Zeng, Z. Huang, Y. Luo, T. Xie, and W. Yang from Zhejiang University in Hangzhou, China was published in Science Advances.
 Image: North Carolina State University
Image: North Carolina State University
Meanwhile, over at North Carolina State University, in Raleigh, researchers have been working on a more fundamental actuation technique that has potential for soft robots. They’re not quite at the making-a-robot stage yet, but they’ve managed to turn polymer films into muscles that can be actuated remotely with a magnetic field. The researchers introduced iron microparticles into a liquid polymer mixture, and then applied a magnetic field to the goo, causing the microparticles to align themselves into parallel chains. When the goo was dried and cut into strips, the chains persisted, and when another magnetic field is applied to them, the chains align to it, yanking the polymer along with them.
By changing the strength and direction of the magnetic field and tweaking the structure of the polymer, the researchers were able to create a set of potentially quite useful soft actuators, including a cantilever that can lift up to 50 times its own weight, an expanding and contracting accordion structure that works like a muscle, and a tube with a traveling compression wave that functions as a peristaltic pump.
These actuators seem to be cheap and easy to construct, and while they’re constrained by only actuating in response to an external force, they’ll work great on tiny robots inside your body, or perhaps in the context of deployable robots or structures that don’t need to be actuated constantly.
“Chained Iron Microparticles for Directionally Controlled Actuation of Soft Robots,” by Marissa M. Schmauch, Sumeet R. Mishra, Benjamin A. Evans, Orlin D. Velev, and Joseph B. Tracy from North Carolina State University was published in ACS Applied Materials and Interfaces.


