Video Friday: NASA Is Sending This Flying Robot to Saturn's Moon Titan
Your weekly selection of awesome robot videos
Video Friday is your weekly selection of awesome robotics videos, collected by your Automaton bloggers. We’ll also be posting a weekly calendar of upcoming robotics events for the next few months; here’s what we have so far (send us your events!):
MARSS 2019 – July 1-5, 2019 – Helsinki, Finland
ICRES 2019 – July 29-30, 2019 – London, UK
DARPA SubT Tunnel Circuit – August 15-22, 2019 – Pittsburgh, PA, USA
Let us know if you have suggestions for next week, and enjoy today’s videos.
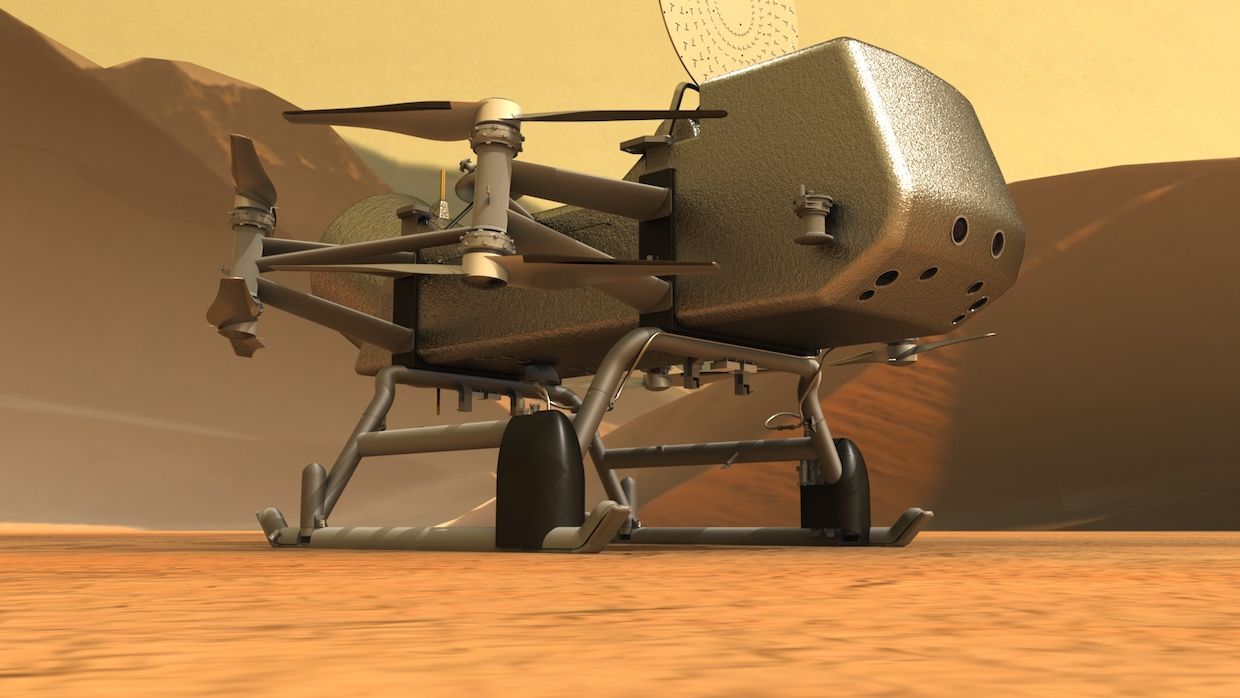
The big news today is that NASA is sending a robot to Saturn’s moon Titan. A flying robot. The Dragonfly mission will launch in 2026 and arrive in 2034, but you knew that already, because last January, we posted a detailed article about the concept from the Applied Physics Lab at Johns Hopkins University. And now it’s not a concept anymore, yay!
Again, read all the details plus an interview in 2018 article.
[ NASA ]
A robotic gripping arm that uses engineered bacteria to “taste” for a specific chemical has been developed by engineers at the University of California, Davis, and Carnegie Mellon University. The gripper is a proof-of-concept for biologically-based soft robotics.
The new device uses a biosensing module based on E. coli bacteria engineered to respond to the chemical IPTG by producing a fluorescent protein. The bacterial cells reside in wells with a flexible, porous membrane that allows chemicals to enter but keeps the cells inside. This biosensing module is built into the surface of a flexible gripper on a robotic arm, so the gripper can “taste” the environment through its fingers.
When IPTG crosses the membrane into the chamber, the cells fluoresce and electronic circuits inside the module detect the light. The electrical signal travels to the gripper’s control unit, which can decide whether to pick something up or release it.
[ UC Davis ]
The Toyota Research Institute (TRI) is taking on the hard problems in manipulation research toward making human-assist robots reliable and robust. Dr. Russ Tedrake, TRI Vice President of Robotics Research, explains how we are exploring the challenges and addressing the reliability gap by using a robot loading dishes in a dishwasher as an example task.
[ TRI ]
The Tactile Telerobot is the world’s first haptic telerobotic system that transmits realistic touch feedback to an operator located anywhere in the world. It is the product of joint collaboration between Shadow Robot Company, HaptX, and SynTouch. All Nippon Airways funded the project’s initial research and development.
What’s really unique about this is the HaptX tactile feedback system, which is something we’ve been following for several years now. It’s one of the most magical tech experiences I’ve ever had, and you can read about it here and here.
[ HaptX ]
Thanks Andrew!
I love how snake robots can emulate some of the fanciest moves of real snakes, and then also do bonkers things that real snakes never do.
[ Matsuno Lab ]
Here are a couple interesting videos from the Human-Robot Interaction Lab at Tufts.
A robot is instructed to perform an action and cannot do it due to lack of sensors. But when another robot is placed nearby, it can execute the instruction by tacitly tapping into the other robot’s mind and using that robot’s sensors for its own actions. Yes, it’s automatic, and yes, it’s the BORG!
Two Nao robots are instructed to perform a dance and are able to do it right after instruction. Moreover, they can switch roles immediately, and even a third different PR2 robot can perform the dance right away, demonstrating the ability of our DIARC architecture to learn quickly and share the knowledge with any type of robot running the architecture.
Compared to Nao, PR2 just sounds... depressed.
[ HRI Lab ]
This work explores the problem of robot tool construction - creating tools from parts available in the environment. We advance the state-of-the-art in robotic tool construction by introducing an approach that enables the robot to construct a wider range of tools with greater computational efficiency. Specifically, given an action that the robot wishes to accomplish and a set of building parts available to the robot, our approach reasons about the shape of the parts and potential ways of attaching them, generating a ranking of part combinations that the robot then uses to construct and test the target tool. We validate our approach on the construction of five tools using a physical 7-DOF robot arm.
We like Magazino’s approach to warehouse picking- constrain the problem to something you can reliably solve, like shoeboxes.
Magazino has announced a new pricing model for their robots. You pay 55k euros for the robot itself, and then after that, all you pay to keep the robot working is 6 cents per pick, so the robot is only costing you money for the work that it actually does.
[ Magazino ]
Thanks Florin!
Human-Robot Collaborations are happening across factories worldwide, yet very few are using it for smaller businesses, due to high costs or the difficulty of customization. Elephant Robotics, a new player from Shenzhen, the Silicon Valley of Asia, has set its sight on helping smaller businesses gain access to smart robotics. They created a Catbot (a collaborative robotic arm) that will offer high efficiency and flexibility to various industries.
The Catbot is set to help from education projects, photography, massaging, to being a personal barista or co-playing a table game. The customizations are endless. To increase the flexibility of usage, the Catbot is extremely easy to program from a high precision task up to covering hefty ground projects.
Thanks Johnson!
Dronistics, an EPFL spin-off, has been testing out their enclosed delivery drone in the Dominican Republic through a partnership with WeRobotics.
[ WeRobotics ]
QTrobot is an expressive humanoid robot designed to help children with autism spectrum disorder and children with special educational needs in learning new skills. QTrobot uses simple and exaggerated facial expressions combined by interactive games and stories, to help children improve their emotional skills. QTrobot helps children to learn about and better understand the emotions and teach them strategies to handle their emotions more effectively.
[ LuxAI ]
Here’s a typical day in the life of a Tertill solar-powered autonomous weed-destroying robot.
$300, now shipping from Franklin Robotics.
[ Tertill ]
PAL Robotics is excited to announce a new TIAGo with two arms, TIAGo++! After carefully listening to the robotics community needs, we used TIAGo’s modularity to integrate two 7-DoF arms to our mobile manipulator. TIAGo++ can help you swiftly accomplish your research goals, opening endless possibilities in mobile manipulation.
[ PAL Robotics ]
Thanks Jack!
You’ve definitely already met the Cobaltsecurity robot, but Toyota AI Ventures just threw a pile of money at them and would therefore like you to experience this re-introduction:
[ Cobalt Robotics ] via [ Toyota AI ]
ROSIE is a mobile manipulator kit from HEBI Robotics. And if you don’t like ROSIE, the modular nature of HEBI’s hardware means that you can take her apart and make something more interesting.
[ HEBI Robotics ]
Learn about Kawasaki Robotics’ second addition to their line of duAro dual-arm collaborative robots, duAro2. This model offers an extended vertical reach (550 mm) and an increased payload capacity (3 kg/arm).
Drone Delivery Canada has partnered with Peel Region Paramedics to pilot its proprietary drone delivery platform to enable rapid first responder technology via drone with the goal to reduce response time and potentially save lives.
In this week’s episode of Robots in Depth, Per speaks with Harri Ketamo, from Headai.
Harri Ketamo talks about AI and how he aims to mimic human decision making with algorithms. Harri has done a lot of AI for computer games to create opponents that are entertaining to play against. It is easy to develop a very bad or a very good opponent, but designing an opponent that behaves like a human, is entertaining to play against and that you can beat is quite hard. He talks about how AI in computer games is a very important story telling tool and an important part of making a game entertaining to play.
This work led him into other parts of the AI field. Harri thinks that we sometimes have a problem separating what is real from what is the type of story telling he knows from gaming AI. He calls for critical analysis of AI and says that data has to be used to verify AI decisions and results.
[ Robots in Depth ]
Thanks Per!
Evan Ackerman is a senior editor at IEEE Spectrum. Since 2007, he has written over 6,000 articles on robotics and technology. He has a degree in Martian geology and is excellent at playing bagpipes.
Erico Guizzo is the Director of Digital Innovation at IEEE Spectrum, and cofounder of the IEEE Robots Guide, an award-winning interactive site about robotics. He oversees the operation, integration, and new feature development for all digital properties and platforms, including the Spectrum website, newsletters, CMS, editorial workflow systems, and analytics and AI tools. An IEEE Member, he is an electrical engineer by training and has a master’s degree in science writing from MIT.