
Just when I think I've seen every possible iteration of climbing robot, someone comes up with a new way of getting robots to stick to things. The latest technique comes from the Bioinspired Robotics and Design Lab at UCSD, where they've managed to get a robot to stick to smooth surfaces using a vibrating motor attached to a flexible disk. How the heck does it work?
According to a paper just published in Advanced Intelligent Systems, it's due to “the fluid mediated adhesive force between an oscillatory plate and a surface" rather than black magic. Obviously.
Weird, right? In the paper, the researchers explain that what's going on here: As the 14cm diameter flexible disk vibrates at 200 Hz, it generates a thin layer of low pressure air in between itself and the surface that it's vibrating against. Although the layer of low pressure air is less than 1 mm thick, the disk can resist 5 N of force pulling on it. You can sort of think of this as a suction effect, except that it doesn't require the disk to be constantly sealed against a surface, meaning that the robot can move around without breaking adhesion.
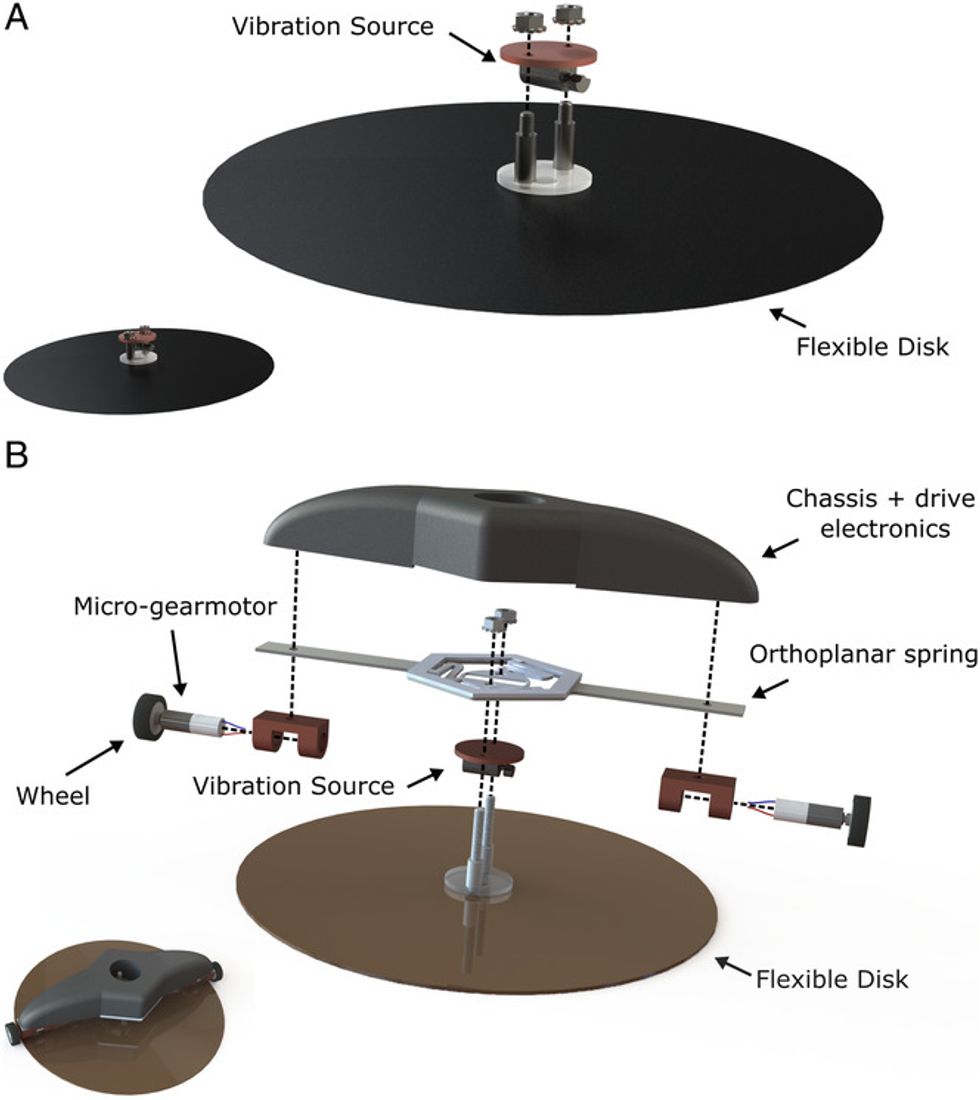 Image: UCSD
Image: UCSD
The big advantage here is that this is about as simple and cheap as a smooth-surface climbing robot gets, especially at small(ish) scales. There are a couple of downsides too, though. The biggest one could be that 200 Hz is a frequency that's well within human hearing, which probably explains that soundtrack in the video—the robot is, as the researchers put it, “inherently quite noisy." And in contrast to some other controllable adhesion techniques, this system must be turned on at all times or it will immediately plunge to its doom.
The robot you're looking at in the video (with a 14cm disk) seems to be the sweet spot when it comes to size—going smaller means that the motor starts taking up a disproportionate amount of weight, while going larger would likely not scale well either, with the overall system mass increasing faster than the amount of adhesion that you get. The researchers suggest that “it could be advantageous to combine several disk geometries to achieve the desired load capacity and resilience to disturbances," but that's one of a number of things that the researchers need to figure out to properly characterize this novel adhesion technique.
Gas-Lubricated Vibration-Based Adhesion for Robotics, by William P. Weston-Dawkes, Iman Adibnazari, Yi-Wen Hu, Michael Everman, Nick Gravish, and Michael T. Tolley, is available here.
This article appears in the September 2021 print issue as "Curious Physics Lets Robot Crawl Across Ceilings."


