
The facets of autonomous car development that automakers tend to get excited about are things like interpreting sensor data, decision making, and motion planning.
Unfortunately, if you want to make self-driving cars, there’s all kinds of other stuff that you need to get figured out first, and much of it is really difficult but also absolutely critical. Things like, how do you set up a reliable network inside of your vehicle? How do you manage memory and data recording and logging? How do you get your sensors and computers to all talk to each other at the same time? And how do you make sure it’s all stable and safe?
In robotics, the Robot Operating System (ROS) has offered an open-source solution for many of these challenges. ROS provides the groundwork for researchers and companies to build off of, so that they can focus on the specific problems that they’re interested in without having to spend time and money on setting up all that underlying software infrastructure first.
Apex.AI’s Apex OS, which is having its version 1.0 release today, extends this idea from robotics to autonomous cars. It promises to help autonomous carmakers shorten their development timelines, and if it has the same effect on autonomous cars as ROS has had on robotics, it could help accelerate the entire autonomous car industry.
For more about what this 1.0 software release offers, we spoke with Apex.AI CEO Jan Becker.
IEEE Spectrum: What exactly can Apex.OS do, and what doesn't it do?
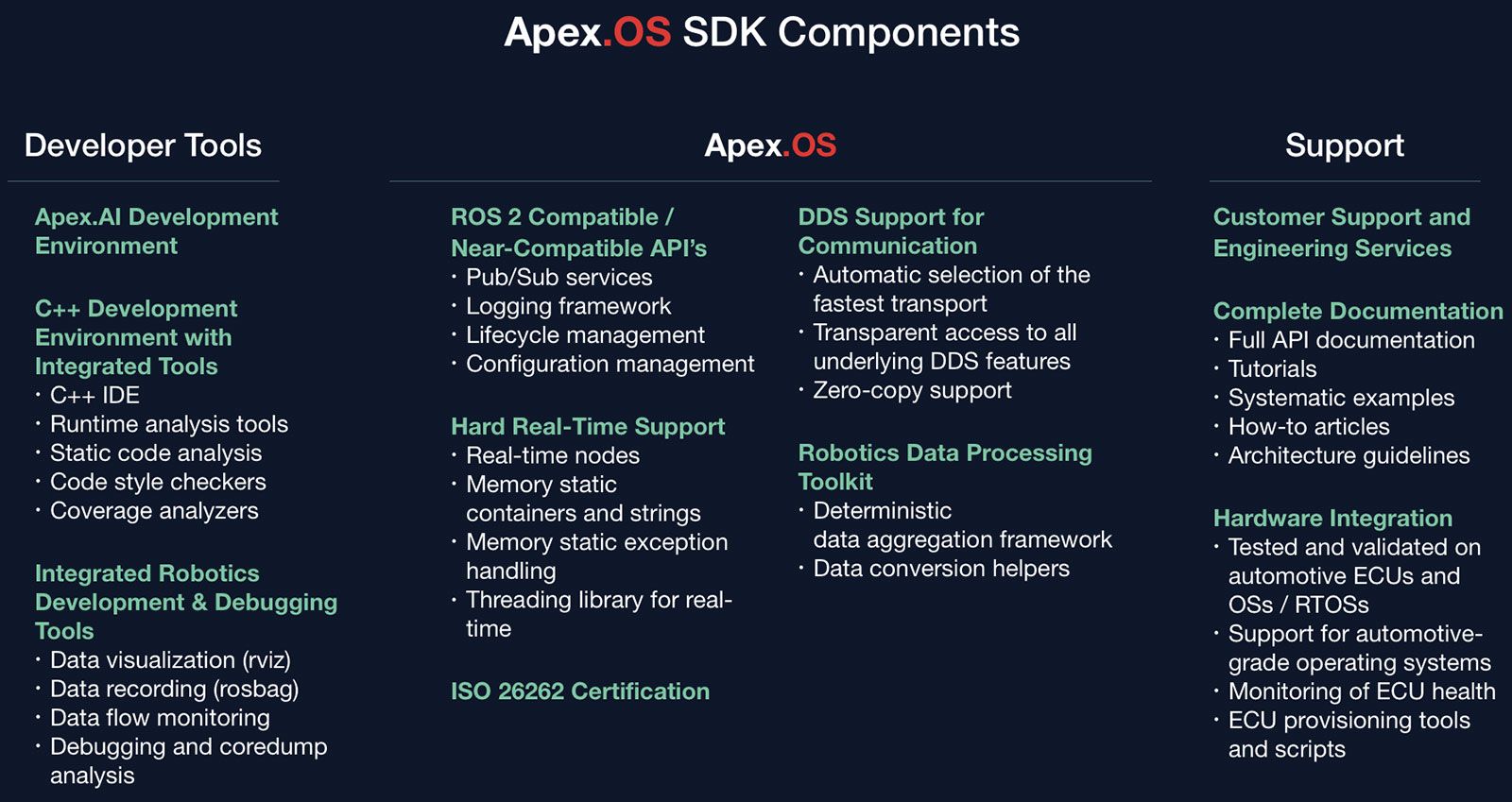
Jan Becker: Apex.OS is a fork of ROS 2 that has been made robust and reliable so that it can be used for the development and deployment of highly safety-critical systems such as autonomous vehicles, robots, and aerospace applications. Apex.OS is API-compatible to ROS 2. In a nutshell, Apex.OS is an SDK for autonomous driving software and other safety-critical mobility applications. The components enable customers to focus on building their specific applications without having to worry about message passing, reliable real-time execution, hardware integration, and more.
Apex.OS is not a full [self-driving software] stack. Apex.OS enables customers to build their full stack based on their needs. We have built an automotive-grade 3D point cloud/lidar object detection and tracking component and we are in the process of building a lidar-based localizer, which is available as Apex.Autonomy. In addition, we are starting to work with other algorithmic component suppliers to integrate Apex.OS APIs into their software. These components make use of Apex.OS APIs, but are available separately, which allows customers to assemble a customized full software stack from building blocks such that it exactly fits their needs. The algorithmic components re-use the open architecture which is currently being built in the open source Autoware.Auto project.
So if every autonomous vehicle company started using Apex.OS, those companies would still be able to develop different capabilities?
Apex.OS is an SDK for autonomous driving software and other safety-critical mobility applications. Just like iOS SDK provides an SDK for iPhone app developers enabling them to focus on the application, Apex.OS provides an SDK to developers of safety-critical mobility applications.
Every autonomous mobility system deployed into a public environment must be safe. We enable customers to focus on their application without having to worry about the safety of the underlying components. Organizations will differentiate themselves through performance, discrete features, and other product capabilities. By adopting Apex.OS, we enable them to focus on developing these differentiators.
What's the minimum viable vehicle that I could install Apex.OS on and have it drive autonomously?
In terms of compute hardware, we showed Apex.OS running on a Renesas R-Car H3 and on a Quanta V3NP at CES 2020. The R-Car H3 contains just four ARM Cortex-A57 cores and four ARM Cortex-A53 cores and is the smallest ECU for which our customers have requested support. You can install Apex.OS on much smaller systems, but this is the smallest one we have tested extensively so far, and which is also powering our vehicle.
We are currently adding support for the Renesas R-Car V3H, which contains four ARM Cortex-A53 cores (and no ARM Cortex-A57 cores) and an additional image processing processor.
You suggest that Apex.OS is also useful for other robots and drones, in addition to autonomous vehicles. Can you describe how Apex.OS would benefit applications in these spaces?
Apex.OS provides a software framework that enables reading, processing, and outputting data on embedded real-time systems used in safety-critical environments. That pertains to robotics and aerospace applications just as much as to automotive applications. We simply started with automotive applications because of the stronger market pull.
Industrial robots today often run ROS for the perception system and non-ROS embedded controller for highly-accurate position control, because ROS cannot run the realtime controller with the necessary precision. Drones often run PX4 for the autopilot and ROS for the perception stack. Apex.OS combines the capabilities of ROS with the requirements of mobility systems, specifically regarding real-time, reliability and the ability to run on embedded compute systems.
How will Apex contribute back to the open-source ROS 2 ecosystem that it's leveraging within Apex.OS?
We have contributed back to the ROS 2 ecosystem from day one. Any and all bugs that we find in ROS 2 get fixed in ROS 2 and thereby contributed back to the open-source codebase. We also provide a significant amount of funding to Open Robotics to do this. In addition, we are on the ROS 2 Technical Steering Committee to provide input and guidance to make ROS 2 more useful for automotive applications. Overall we have a great deal of interest in improving ROS 2 not only because it increases our customer base, but also because we strive to be a good open-source citizen.
The features we keep in house pertain to making ROS 2 realtime, deterministic, tested, and certified on embedded hardware. Our goals are therefore somewhat orthogonal to the goals of an open-source project aiming to address as many applications as possible. We, therefore, live in a healthy symbiosis with ROS 2.
[ Apex.AI ]


