The Conversation (0)

Photo: Bill Cramer/Wonderful Machine
This is part of IEEE Spectrum’s Special Report: Why Mars? Why Now?
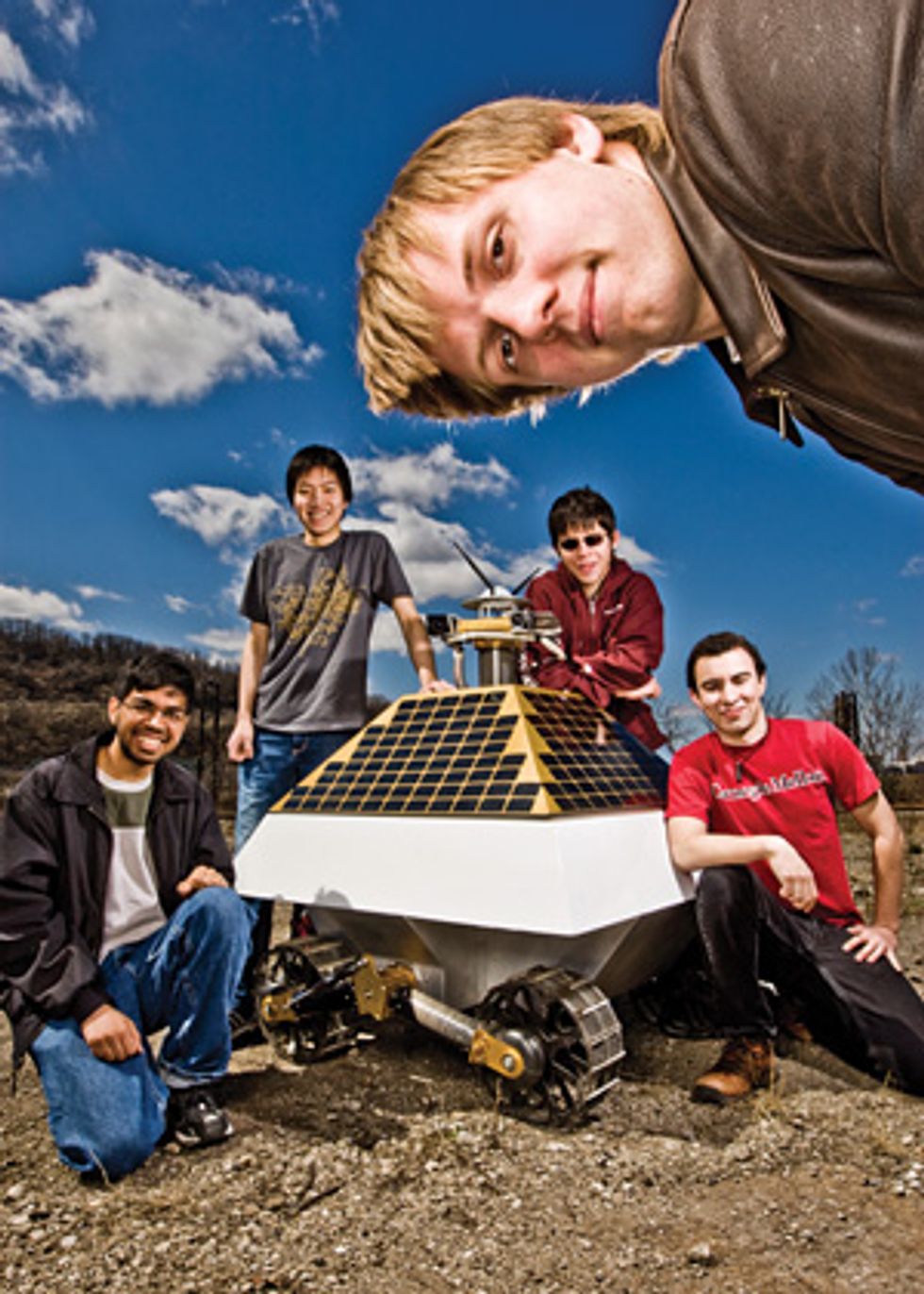 Photo: Bill Cramer/Wonderful Machine
Photo: Bill Cramer/Wonderful Machine
The rover has gone blind. It had been running all night, its two mast-mounted cameras capturing high-resolution stereo images of its surroundings. Now it’s sitting idly in the middle of the room. Fixing the thing is not how Ross Finman had planned to start his day at the lab.
Finman, a 19-year-old undergraduate wearing wrinkled black trousers and an old brown leather jacket, uses a laptop to log on wirelessly to the rover’s computer. “That’s weird,” he says, and tries to restart the cameras. Still no go. Definitely not a good day.
“Who touched it?” he says.
“I did,” a student nearby shouts back. “That’s why it shouldn’t be broken.”
Finman summons Michael Furlong, a grad student and the camera wizard around here. Furlong pulls up a diagnostics screen on the laptop. Some log files had grown excessively large, eating up CPU cycles. He deletes the files and reboots the computer. Seconds later, the rover can see again.
“Mike is the man,” Finman says, grinning at Furlong, who doesn’t take his eyes off the screen.
It’s just another day at the Field Robotics Center, part of Carnegie Mellon University’s Robotics Institute, in Pittsburgh. Led by renowned roboticist William “Red” Whittaker, the center has built robots for exploring ice fields, deserts, volcanoes, and coal mines. Now his team is designing a robot to go somewhere else entirely—a crater-scarred rock 380 000 kilometers from here. The moon.
Whittaker’s Astrobotic team is one of the competitors vying for the Google Lunar X Prize. The challenge, announced by Google and the X Prize Foundation in September 2007, will give US $20 million to the first privately funded team whose robot lands on the moon, travels 500 meters, and beams back photos and video. It all has to happen by 2012.
Hours after the announcement, Whittaker sent in the $10 000 registration fee. Within weeks he had mobilized some 60 researchers and students to develop the rover and also a lander to gently deposit it on lunar soil. He set up a company, Astrobotic Technology, to find ways of funding the project, which may cost much more than the prize. And he recruited two strategic partners: The University of Arizona’s Lunar and Planetary Laboratory, in Tucson, which brings imaging and mission-planning expertise, and defense contractor Raytheon, which brings the precision-landing technology.
There were 17 teams officially registered in the competition when this article went to press. But talk to Astrobotic team members and you get the feeling that there are no other contenders. Their plan is not only to be first; they intend to beat the X Prize deadline by more than a year. Their shot at the moon is scheduled for December 2010. It’s a feat they hope to pull off, as Whittaker puts it, “without raising a heartbeat.”

All Photos: Bill Cramer/Wonderful Machine
Readying the Rover: Clockwise from top left: Munoz and Minogue remove the main cover to inspect the rover’s electronics; Mike Furlong develops software to control the cameras and convert their images into three-dimensional maps; the current rover prototype uses mostly off-the-shelf hardware, which will later be upgraded to space-rated components; Erika Bannon, in charge of the rover’s thermal design, holds a cold plate used in heat-dissipation tests; Finman operates the rover’s wheels and cameras using a control interface on a laptop.
In a weekly meeting with two dozen students, Whittaker, a former U.S. Marine with a charismatic and intimidating style, makes it clear that he expects utter commitment from everyone, no excuses, “be it love or dirty laundry.”
“Remember,” he says, “this is a team, not a democracy.”
The students listen in silence and appear to experience a mix of awe and fear. They know they’ll have to work hard to live up to their master’s expectations. But they seem content to be a part of what promises to be a successful effort: If anyone can put a robot on the moon, that person is Red Whittaker.
To see how the project is materializing, head for the High Bay, a hangarlike laboratory where the Red Rover, as it’s known, is taking shape. Bleary-eyed students hunch over handbooks on aerospace engineering and toy with computer simulations. You can sense the urgency in the air—it’s not just the smell of pizza brought in during the long days of work. Team members are so immersed in their tasks that they don’t even flinch when a stranger with a microphone stands next to them, peering at their computer screens.
“I pretty much live here,” says Finman, who leads the rover’s field tests. That an undergraduate was put in charge of such a critical task is no surprise when it comes to Whittaker’s projects. The energetic Finman, a rocket enthusiast since childhood and also an avid skydiver, is just the type of student Whittaker seeks.
On a typical day at the High Bay, Red’s recruits work on a host of jobs dealing with mechanical structures, electronic modules, control systems, vision, and avionics. The plan is to go through several design iterations, building prototypes, evaluating them, and making improvements until the final rover emerges.
The current version looks like a small pyramid plastered with solar cells. It has four metal-mesh wheels with a suspension system that has no axles or springs, ideal for climbing over large obstacles. Atop the chassis, a short mast holds a pan-tilt head with two cameras.
This design, the second iteration, uses off-the-shelf hardware. The team plans to build a third version, with enhancements, and then a fourth and final version, which will be upgraded with space-rated components. That means the fat power cord that now trails the rover will be replaced by high-efficiency solar cells and packs of lithium-ion-phosphate batteries. The current PC-based control system will give way to a $2 million radiation-hardened RAD750 computer by BAE Systems.
The rover is controlled remotely, so it doesn’t need sophisticated self-driving systems or lots of sensors. What it needs is to be small and light, because sending things into space is expensive. It also has to be reliable and resilient enough to withstand harsh conditions that include 9 g’s of acceleration and heavy showers of cosmic rays. Scurrying around on the moon, it will experience extreme heat, with temperatures reaching 120 C at noon.
Making sure the rover doesn’t have a meltdown—literally—is Erika Bannon’s department. Sitting at her computer, headphones on, she balances a phonebook-thick tome— Radiative Heat Transfer —on her lap. The moon has no atmosphere, so dissipating heat is a big challenge. “Air makes everything easier,” she says. “You put on a fan and it’s good.”
Bannon explains that the rover will use radiators to emanate infrared energy into space to cool its computers. Carbon plates with high heat conductivity will prevent solar cells from overheating, which would cause a drop in voltage.
The thermal design is only one piece in a complex system of systems. A lot remains to be done. But the Astrobotic team members—perhaps infused with a good dose of Red-high readiness—seem to know exactly how to proceed.
“ ‘Keep it simple, stupid’ is the motto around here,” a student tells a colleague as they evaluate three-dimensional models of rover components on a computer.
“Yeah!” the other pipes up. “It’s only rocket science.”
Of course, before the Red Rover can leave its tread marks on the lunar soil, it has to get there. Astrobotic’s plan is to buy space on a commercial satellite-launching rocket for its payload—the rover and the lander. The lander will use retro-rockets to decelerate and guide its descent.
This is where Raytheon comes in. The craft’s landing system is based on missile technologies in the company’s arsenal. One is a propulsion system that guides missiles to intercept enemy aircraft. The other is a navigation technology used on cruise missiles. The landing system will kick in just 60 seconds before touchdown, continuously taking images of the lunar surface, comparing them with a reference map, and propelling the lander toward the exact target point.
Team members are now piecing the parts together into a mission plan, which calls for landing a few kilometers from the Apollo 11 site. The researchers will have two weeks to explore the area and send back images. After that, the sun will set and temperatures will plunge to –170 C, at which point electronic components will rip apart, and the rover will die quietly in the vastness of the Sea of Tranquility.
Back at the High Bay, Finman is checking the rover’s computers and cameras for a new round of field tests. He toggles buttons on a control panel. Motors whir and the cameras tilt up and down. They turn to the left, smoothly at first, then with a quick jerk, and then smoothly again before they stop. A gear tooth is broken.
Finman says there’s no need to fix it. A new rover prototype is already taking shape on a nearby worktable. He’s confident it will soon evolve into the hardy little robot that will get to the moon and send back beautiful pictures. It will all come together in the end. It’s only rocket science.
For more articles, go to Special Report: Why Mars? Why Now?
To Probe Further
For more, view the slide show, “A Team of Engineers, a Hardy Robot, the Moon.”


