
In December, China will attempt the first soft landing of a spacecraft on the far side of the moon. No official date has been announced, but the mission is rumored for launch around 8 December, with a landing to follow late in the month.
Mission scientists say the capability to precisely land on a specific spot on the moon and conduct autonomous exploration from there will lay a foundation for future lunar and deep-space exploration, including expanded missions to the lunar poles in the early 2020s. But their ambitious effort requires new and improved communications, navigation, and landing technologies.
The Chang’e-4 lander and rover, which could soon become the first spacecraft to touch the moon’s far side, were originally designed as backups for the Chang’e-3 mission, which in 2013 completed China’s first moon landing. After Chang’e-3 successfully touched down on Mare Imbrium, a lava field on the lunar near side, the Chang’e-4 spacecraft were repurposed for a far-side landing.
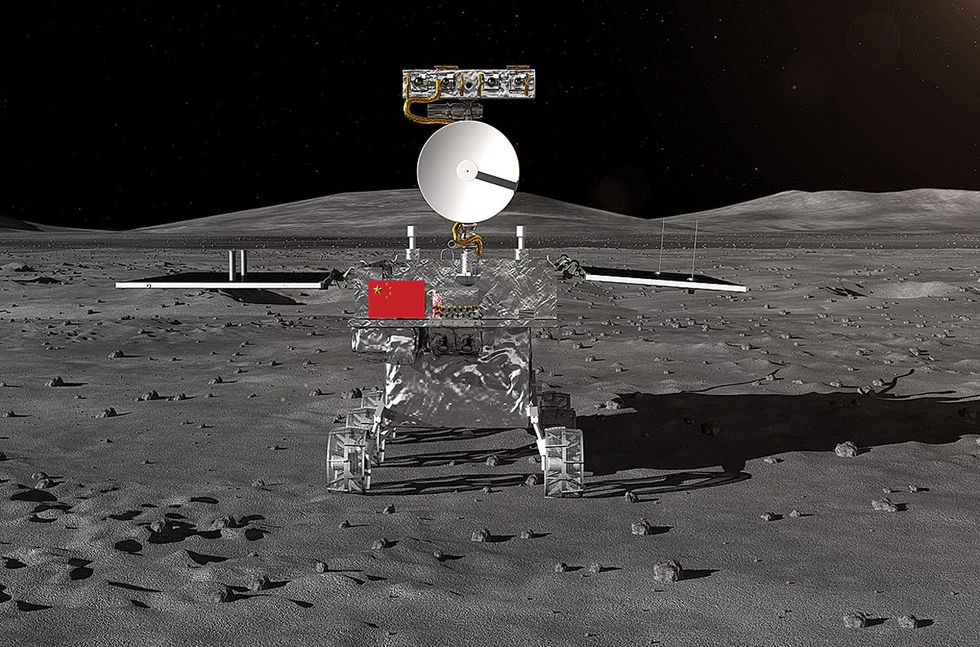
Notably, the Chang’e-3 rover, called Yutu, or Jade Rabbit, permanently lost its ability to rove after moving only 114 meters in its first two lunar days (about a month, in Earth time). Li Ming, vice president of the China Academy of Space Technology, said in October at the International Astronautical Congress, in Germany—without revealing technical details—that the problem was related to very small components. The new 140-kilogram Chang’e-4 rover, he added, should prove more reliable and function longer than even the three months that Yutu should’ve lasted by design.
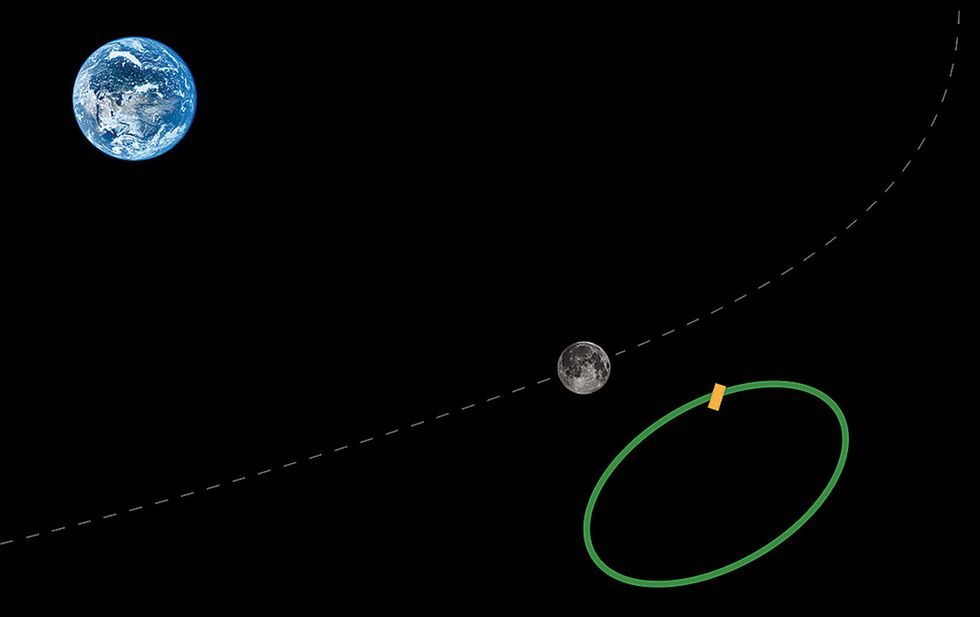
 Far From Home: The Queqiao satellite (top, orange) follows an orbit (green) that places it just past the moon (gray). From there, it can relay information from China’s new rover (bottom) to Earth and back.Images, top: China Academy of Space Technology; Bottom: Reuters
Far From Home: The Queqiao satellite (top, orange) follows an orbit (green) that places it just past the moon (gray). From there, it can relay information from China’s new rover (bottom) to Earth and back.Images, top: China Academy of Space Technology; Bottom: Reuters
The first challenge for the Chang’e-4 team was that the far side of the moon cannot be seen directly from Earth. Over time, Earth’s gravitational pull has slowed the moon’s rotation to match its orbital period, with the result that one side of the moon always faces Earth. Unfortunately, not having a clear view of the moon’s other side makes it difficult for earthlings to send and receive signals with a rover placed there.
To overcome this, China launched a communications relay satellite in May named Queqiao, which passed beyond the moon and inserted itself into what is known as a halo orbit. In this orbit, the satellite will revolve around a point about 60,000 to 80,000 kilometers beyond the moon (also known as the second Earth-moon Lagrange point), as it follows the moon’s path around Earth. From there, it will always keep both the lunar far side and Earth within sight.
If all goes as planned, Queqiao will use the long-range radio-frequency X-band to communicate with both the lander and rover, while the latter two will speak to each other via ultrahigh-frequency radios. China’s ground stations and Queqiao will use the S-band to send data back and forth. China has recently expanded the range of its ground stations by adding sites in Argentina and Namibia to those at Jiamusi and Kashi in China, to provide telemetry, tracking, and command for spacecraft.
When it comes to landing the combined 3,780-kg spacecraft, the topography of the lunar far side is also quite different from that of the near side. The surface on the far side is very rugged, with few of the flat maria—dark, basaltic plains—abundant on the near side. The far side also features more variability in surface altitude and much greater crater coverage. All of this makes it difficult to find a large, flat landing spot, meaning the candidate landing sites will be reduced from areas covering hundreds of square kilometers for Chang’e-3 down to tens of square kilometers for Chang’e-4.
Due to these constraints, Chang’e-4 will target the 180-km-diameter Von Kármán crater within the South Pole–Aitken basin. That area is the oldest impact basin in the solar system and of great interest to scientists because it could contain exposed areas of the lunar mantle and provide clues to the evolution of the Earth-moon system. Crucially for the landing, the Von Kármán crater is flatter than any other spot in the South Pole–Aitken basin, says Ping Jinsong, principal investigator for the low-frequency spectrometer on the lander.
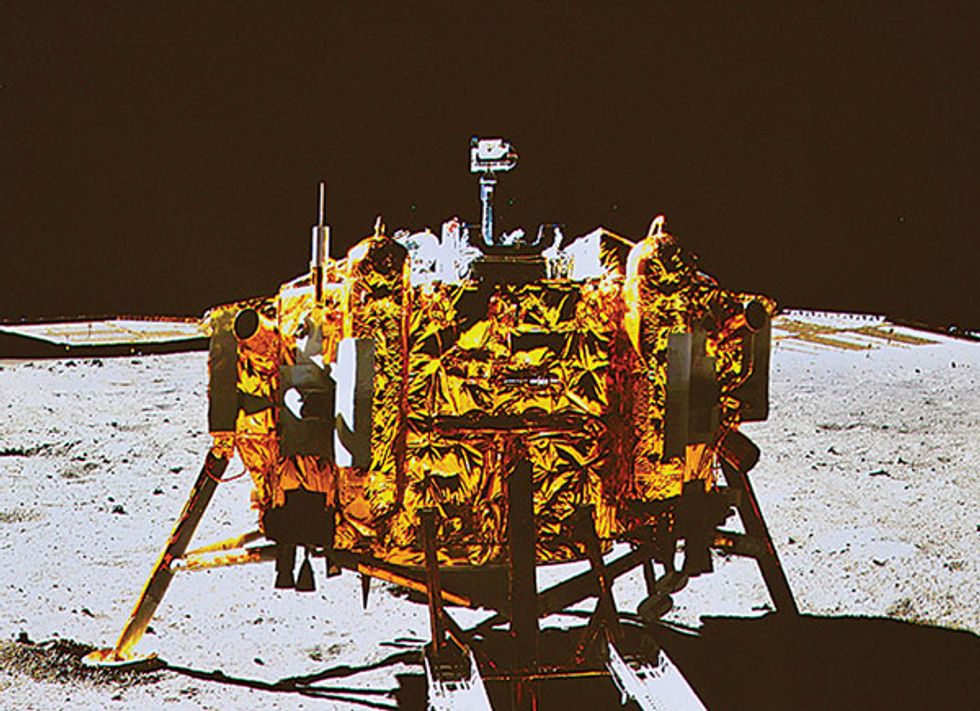 Moon Mission: This snapshot of the Chang’e-3 lander was taken by the rover that accompanied it to the moon in 2013.Photo: Reuters
Moon Mission: This snapshot of the Chang’e-3 lander was taken by the rover that accompanied it to the moon in 2013.Photo: Reuters
Algorithms used by the Chang’e-4 guidance, navigation, and control subsystem—which will guide the lander’s movements, determine its position, and plan its course—have been altered to prevent the undulating far-side topography from adversely influencing the landing, as it would have for Chang’e-3.
The spacecraft will descend in six phases. The first three—initial deceleration, quick attitude and reorientation adjustment, and approach—will be controlled remotely. The final three—hovering, hazard avoidance, and slow descent—will be carried out autonomously by the lander. During descent, the spacecraft will cover around 450 km, but the oblique forward trajectory of the Chang’e-3 descent will be replaced with a much more vertical, downward trajectory for Chang’e-4.
The lander and rover have also been adapted for their new roles on the moon’s surface. They each incorporate a power supply based on radioisotope thermoelectric generators that will allow them to measure soil temperatures—for example, during the lunar night when the surface temperature drops to nearly –180 °C. With all such preparations in place, Chang’e-4 is finally ready to break new ground on the moon, and share its findings with its architects on Earth.
This article appears in the December 2018 print issue as “China Shoots for the Moon’s Far Side.”
A correction to this article was made on 4 December 2018.