One month from now, ICRA 2015 kicks off in Seattle, Washington. Are you ready? Got your hotel room? Awesome! We don’t, so let us know if we can crash with you, okay? Okay. Cool.
As we all know, ICRA stands for IEEE Conference of Robotic Awesomeness (or it should, at any rate). To get you excited, as if you weren’t already excited, the IEEE Robotics & Automation Society has put together a video of some of the coolest research that will be presented this year, with versions available in English, Chinese, Japanese, Korean, Spanish, Arabic, French, and Italian. See what you have to look forward too, plus all the rest of the week’s videos, because that’s right, it’s Friday.
qalegh qaStaHvIS seattle!
[ ICRA 2015 ]
CMU’s Assistive Dexterous Arm, ADA, demonstrates its ability to autonomously stuff your face with marshmallows:
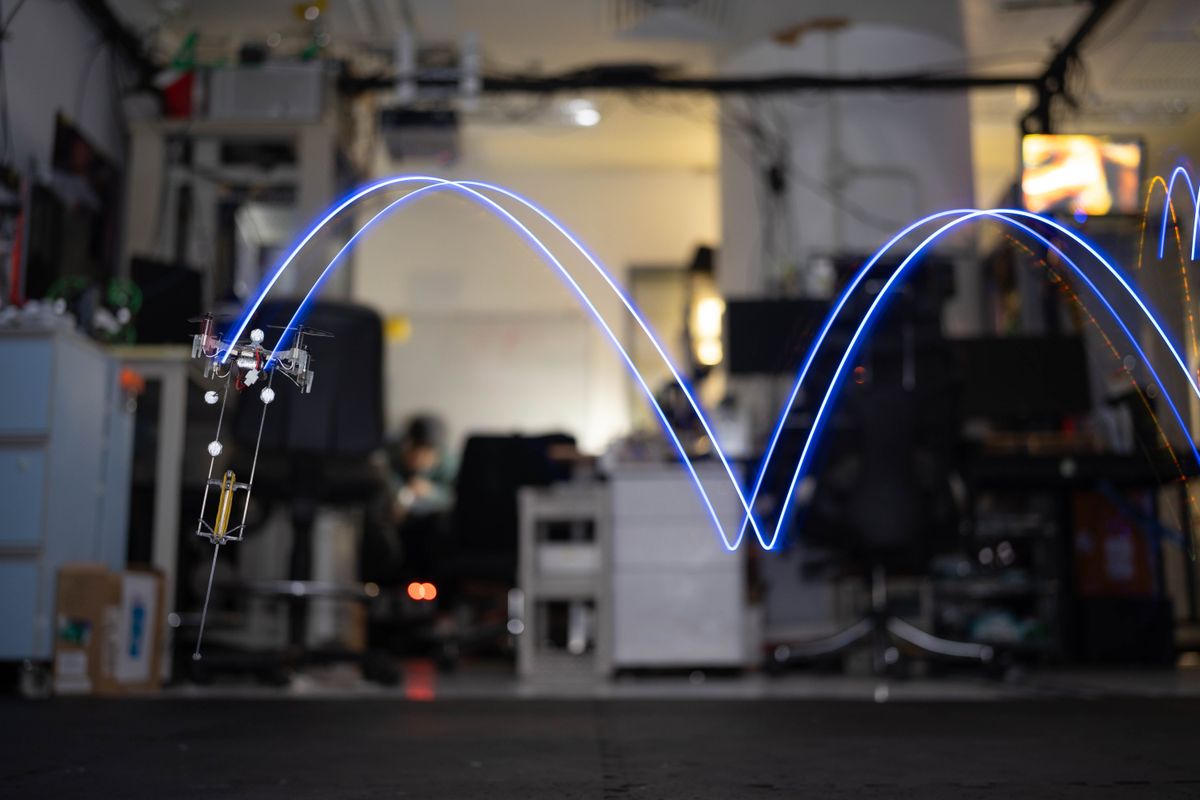
Jogging is a popular exertion activity. The abundance of jogging apps suggests to us that joggers can appreciate the opportunity for technology to support the jogging experience. We want to take this investigation a step further by exploring if, and how, robotic systems can support the jogging experience. We designed and built a flying robotic system, a quadcopter, as a jogging companion and studied its use with 13 individual joggers. By analyzing their experiences, we derived three design dimensions that describe a design space for flying robotic jogging companions: Perceived Control, Focus and Bodily Interaction. Additionally, we articulate a series of design tactics, described by these dimensions, to guide the design of future systems. With this work we hope to inspire and guide designers interested in creating robotic systems to support exertion experiences.
We wrote about Joggobot when it was first announced back in 2012, but what’s new here is a recent paper that was presented at CHI 2015 in Korea that you can read in its entirety here.
That fully armed and operational BB-8 Star Wars droid that we posted a video of last week can be replicated with a Sphero and some magnets:
The link below shows you how it’s done.
[ cp3d ]
WaterFly was one of the finalists for the Drones for Good competition. Developed at MIT’s Senseable Cities Lab and the University of Toronto, the concept is to use a swarm of robots for water quality monitoring:
[ Waterfly ]
The second generation of PLEN, PLEN2, is on Kickstarter. At $800 each, it’s a costly little robot, but it sure is cute:
[ PLEN2 ]
Need some bolts packed? I know I do!
[ Boltpacker ]
This has got to be one of the most accurate and realistic portrayals of a robot attempting to make breakfast that I have ever seen:
[ Karen X. Cheng ]
It’s a bit of a light week this week, so we’re just ending with a brief tour of Stanford University's Salisbury Robotics Lab by PBS, featuring a special appearance by Tony Pratkanis:
Evan Ackerman is a senior editor at IEEE Spectrum. Since 2007, he has written over 6,000 articles on robotics and technology. He has a degree in Martian geology and is excellent at playing bagpipes.