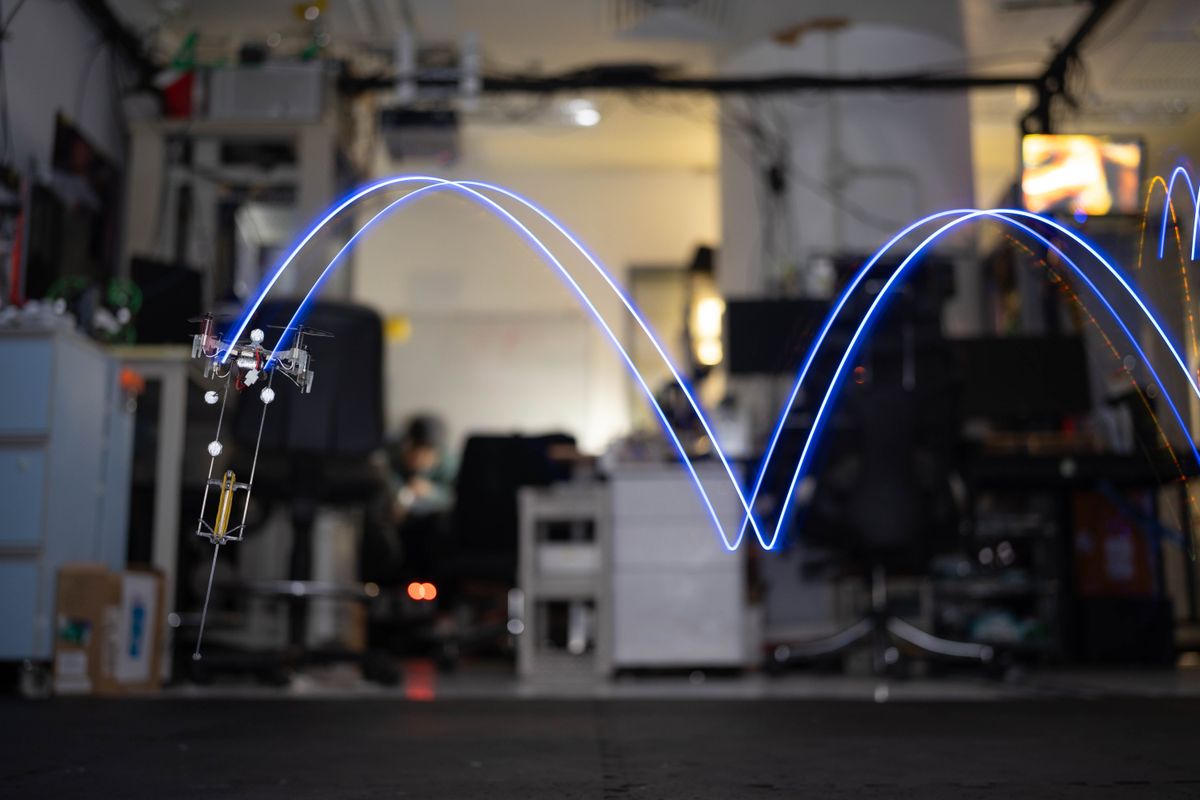
Yesterday we took at look at some little legged robots from UC Berkeley. They're very clever, and very quick. This little legged robot from Johns Hopkins (pictured above) is quicker relative to its size.
Much quicker.
[See update below.] It can travel at over 30 body lengths every second, which works out to over two meters per second, or four and a half miles an hour. If you were travelling at 30 body lengths every second, you'd be going 122 miles an hour. Whoa.
This robot, which still doesn't have a name, is very compact (which measures just 6.5 x 5.5 x 1 centimeter), and according to its creators it is quite possibly "the fastest legged robot of its size." Whether or not this really is a legged robot (or a quadruped) is perhaps debatable: these are wheel-legs, more commonly known as whegs. They're wheels in that there's rotary motion going on, but they're also legs in that there are discrete points of contact with the ground. To some extend, whegs offer the best of both worlds: they can be directly driven with conventional motors and allow for high speed and efficiency, while simultaneously providing traction over rough terrain and obstacles. Plus, you can easily swap them out, and by making them out of springy materials, you can give your robot some compliance.
What makes the robot wicked fast is the fact that it's got four independent drive motors, each one of which has a power to weight ratio that's absolutely bananas. Only 6 millimeters in size each, the motors output 1.5 watts of power at 40,000 RPM, driving the individual whegs through 16:1 planetary gearheads. They're not cheap (hundreds of dollars each), but they make for one crazy little robot. And of course, independently driven whegs make the robot smaller, lighter, simpler to steer, and generally more efficient overall.
The current generation of this robot isn't capable of taking advantage of all of the power that the motors offer: even at top speed, it's only using about 0.60 watt, less than half of what the motors can output, since increasing wheel speed causes the robot to bounce along the ground, decreasing its actual speed. But, there's a lot of potential for swapping in some new whegs up to 35 mm in length (about twice as long as those currently on the robot), "which might produce even faster running speeds and the ability to navigate very large obstacles or challenging terrain, with a robot that still fits in your hand."
"Efficiency and Effectiveness Analysis of a New Direct Drive Miniature Quadruped Robot," by Christopher Y. Brown, from the Johns Hopkins University, and Dana E. Vogtmann and Prof. Sarah Bergbreiter, from University of Maryland's Microrobotics Lab, was presented last month at IEEE International Conference on Robotics and Automation (ICRA) in Germany.
Update 11 June 2013:The post originally said the Johns Hopkins/University of Maryland quadruped was "much quicker" than the UC Berkeley legged robots. Not so fast, the Berkeley team told us in an email. One of their robots, VelociRoach can reach 2.7 m/s, which is faster than the JHU/UMD quadruped's top speed of 2.2 m/s. On the other hand, the JHU/UMD quadruped achieves 33 body lengths/s, which makes it quicker relative to its size than VelociRoach (27 body lengths/s). So, clearly, comparing robots of different sizes is tricky (in fact, if the criteria is top speed, the winner would be another Berkeley robot, STAR, which can run at 5.2 m/s.) Maybe it's time for a race at the next ICRA conference?
Evan Ackerman is a senior editor at IEEE Spectrum. Since 2007, he has written over 6,000 articles on robotics and technology. He has a degree in Martian geology and is excellent at playing bagpipes.