These days, you can find capable and confident robots driving, flying, swimming, diving, out in space, and even boring through ice. What we haven’t seen a lot of are robots designed to dig underground. There have been a few self-burying robots that use digging to their advantage, but they’re not designed for underground locomotion. This is slightly strange, to be honest, considering how many animals make their living by digging tunnels, and also considering how often we humans need to do useful things underground.
The European Union is sponsoring a project to make underground robotics happen through the development of a “robotic system that will be able to drill, maneuver, localize, map and navigate in the underground space, and which will be equipped with tools for constructing horizontal and vertical networks of stable bores and pipelines.” Called BADGER (roBot for Autonomous nDerGround trenchless opERations, mapping and navigation), it is both an interesting and innovative idea and also the most ridiculous acronym I have ever seen.
Construction companies already employ a wide variety of digging machinery to help excavate underground and install pipes and cables. But this equipment has limitations: Typically, it is unable to detect and navigate around rocks, pipes, roots, and other obstacles on its own, so it relies on humans to determine exactly where to dig. Furthermore, these machines are designed to travel in mostly straight lines and can’t build a winding, intricate network of tunnels. They’re also expensive to operate. As a result, construction companies often end up opening trenches, installing the pipes into the hole, and then covering it all up again.
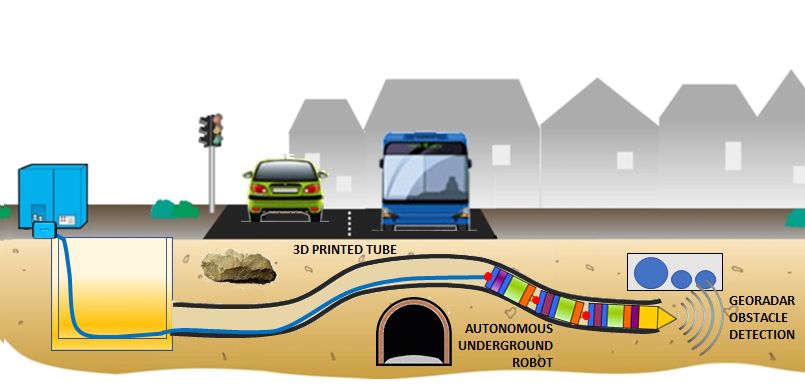
BADGER, in contrast, will be able to autonomously burrow under the ground to create channels for the pipes, navigating around existing infrastructure while it does so. It’s even able to sort of 3D print walls for the conduit it creates as it goes:

The drilling mechanism will be a combination of rotary and impact drilling tech, along with “a novel . . . ultrasonic drill-tool” designed to “foster pulverization of the rock.” All that pulverized rock will be sucked up and flushed out the back of the robot to keep the tunnel clear. The robot will propel itself through bioinspired peristaltic motion, kind of like a worm. Or your intestines. The entire thing is modular, and the drive modules, joint modules, and tool modules can all be swapped out depending on what you’re trying to accomplish. Ground penetrating radar antenna arrays, electronic navigation sensors, and lasers help keep the robot on course via underground SLAM while avoiding underground obstacles like rocks, other pipes, and mole people.
The BADGER project currently involves seven institutions from five European countries. It is coordinated by Professor Carlos Balaguer, Santiago Martínez de la Casa, and Carme de Andrés Sanchis from the RoboticsLab at the University Carlos III of Madrid. The project only started this January (and it’s been funded for €3.7 million over the next three years), so it’s understandable that they don’t yet have any prototype hardware that we’re able to show you. Eventually the idea is to end up with a “robotic system, following a highly modular approach and architecture, while at the same time ensuring reliable and dependable operation in real-life underground environments in synergy with existing robust market technologies for trenchless applications.” Sounds good! Just make sure and look out for those mole people, okay?
[ BADGER Project ]